Использование системы GPS для привязки точек наблюдения и нанесения маршрута
Шаг 4. Теперь можно переходить к выносу точек наблюдений на координатную сетку. Для примера вынесем на координатную сетку точку 1. Для этого по горизонтальной оси (оси X) от сетки с отметкой 35 000 откладываем в масштабе недостающие 876 м и проводим вертикальную линию с отметкой 305 876, а по оси Y от сетки с отметкой 6 034 000 отмеряем 718 м и проводим горизонтальную линию с отметкой… Читать ещё >
Использование системы GPS для привязки точек наблюдения и нанесения маршрута (реферат, курсовая, диплом, контрольная)
(подразд. написан Ю.С. Ананьевым) Использование навигаторов системы GPS облегчает ведение маршрута и привязку точек наблюдения, т. к. избавляет от слежения за азимутами и утомительного подсчета шагов.
Настройку навигатора, определение с его помощью координат точек наблюдения — см. инструкции, прилагаемые к прибору.
Процесс выноса GPS-наблюдений на план можно разделить на несколько шагов.
Шаг I. Необходимо составить каталог точек наблюдений с координатами X и Y. При этом координаты должны быть представлены в прямоугольной системе. Для этого в настройках самого навигатора необходимо установить одну из прямоугольных координатных систем. Целесообразно использовать проекцию UTM или Гаусса-Крюгера. Правда следует заметить, что далеко не во всех навигаторах есть проекция Гаусса-Крюгера. Итак, в настройках навигатора устанавливаем датум WGS 84 и проекцию UTM UPS. Далее составляем каталог точек GPS-наблюдений. Целесообразно использовать следующую форму:
№ точки. | Zona. | X. | Y. | Примечания. |
46N. | ||||
46N. | ||||
46N. | ||||
46N. |
Обратите внимание на то, что координаты приведены в метрах.
ш аг 2. Необходимо определить минимальные и максимальные координаты по осям X и Y. В данном случае они будут следующими.
X. | Y. | |
Минимальный. | ||
Максимальный. |
Ш аг 3. По полученным минимальным и максимальным координатам нужно построить километровую прямоугольную координатную сетку. Для этого необходимо минимальные координаты округлить в меньшую сторону до целого значения (в километрах), а максимальные координаты округлить в большую сторону до целого (в километрах). В нашем примере эти координаты будут следующими.
X. | Y. | |
Минимальный. | ||
Максимальный. |
Проанализируем полученные данные. Разница между минимальными и максимальными значениями обеих координат составляет 1 км. Следовательно, необходимая для нанесения маршрута прямоугольная сетка представляет собой квадрат со стороной 1 км, внутри которого располагается наш маршрут. На бумаге в выбранном масштабе (масштабе съемки и будущего плана), рисуем этот квадрат и обозначаем по его сторонам, совпадающим с осями X и Y соответствующие полученные координаты. Для приведенных данных эта сетка будет иметь следующий вид (136 — квадрат со значениями координат сторон).
Шаг 4. Теперь можно переходить к выносу точек наблюдений на координатную сетку. Для примера вынесем на координатную сетку точку 1. Для этого по горизонтальной оси (оси X) от сетки с отметкой 35 000 откладываем в масштабе недостающие 876 м и проводим вертикальную линию с отметкой 305 876, а по оси Y от сетки с отметкой 6 034 000 отмеряем 718 м и проводим горизонтальную линию с отметкой 6 034 718 м. На пересечении двух линий получим положение точки 1.
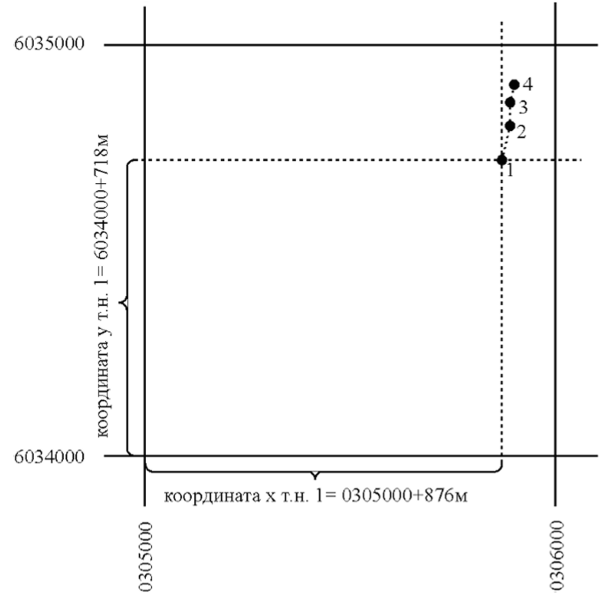
Рис. 136. Координатная сетка (квадрат с координатами сторон) с нанесенным на нее маршрутом
Аналогичным образом выносим все остальные точки наблюдения. В результате получаем план маршрута (рис. 136). При необходимости можно измерить расстояния между точками и вычислить магнитный и истинный азимуты этих расстояний. При вычислении азимутов нужно помнить соотношение между ними и вертикальными линиями координатной сетки в данной местности (см. подразд. 4.2.2 и рис. 11).
Нанесение данных GPS-наблюдений на топооснову делается аналогичным образом и не составляет труда, поскольку координатные сетки с цифровыми обозначениями уже нанесены на топографические карты, однако для этого необходимо пересчитать координаты из проекции UTM в проекцию Гаусса-Крюгера.