Машина переменного тока (асинхронная)
Первый (3/2) преобразовывает фазные напряжения трёхфазной системы в напряжения двухфазной системы в координатах а, /1. Отмстим, что как трёхосная координатная система А, В, С, так и двухосная а, [} являются неподвижными системами. Пространственный вектор изображает результат совместного действия трёхфазной системы токов любой эквивалентной т — фазной и, в частности, двухфазной системы. Переход… Читать ещё >
Машина переменного тока (асинхронная) (реферат, курсовая, диплом, контрольная)
Математическое описание обобщенной асинхронной машины
Токи и напряжения фаз статора (ротора тоже) асинхронного двигателя можно представить в виде пространственного вектора [4], что приводит к сокращению числа и упрощению структуры уравнений, описывающих рабочие процессы асинхронного двигателя.
В общем случае на трёхфазной обмотке статора действует трёхфазная система напряжений:
Суммарный вектор напряжения можно представить в виде:

Если ось А координатной системы А, В, С совместить с вещественной осью комплексной плоскости, расположенной перпендикулярно валу машины, то пространственный (обобщенный) вектор напряжения на обмотках статора асинхронного двигателя определяется уравнением:

где Uл, Uв, Uс — мгновенные значения фазных напряжений (1.10); а — оператор поворота.

Подставим в формулу для пространственного вектора (1.11) выражения (1.10) и (1.12):

При преобразовании полученного выражения использованы следующие соотношения:
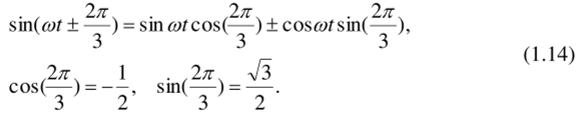
После преобразования (1.13) получим:

Приведем полученное комплексное выражение к стандартной тригонометрической форме, заменив sinсоt — cos (ж/2-ajt) и coscot=sin (ic/2-cot)

Переведем полученное выражение из тригонометрической формы в показательную:

что указывает на возникновение постоянной по амплитуде Um пространственной волны напряжения, вращающейся в положительном направлении с частотой со. Начальное положение пространственного вектора при t-О соответствует углу (-л/2), что позволяет получить его проекции при вращении на оси А, В, С, изменяющиеся в соответствии с формулами (1.10).
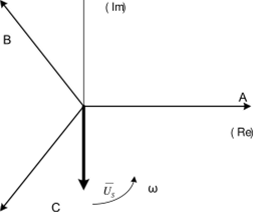
Рис. 1.38. Пространственный вектор напряжения
На рис. 1.38 представлена геометрическая интерпретация пространственного вектора напряжения — это вектор на комплексной плоскости с модулем (длиной) U"" вращающийся с угловой скоростью со в положительном направлении. Проекции вектора Us на фазные оси А, В, С определяют мгновенные напряжения в фазах. Аналогично пространственными векторами можно представить все напряжения, токи и потокосцепления, входящие в уравнения, описывающие работу асинхронного двигателя.
При построении реальных систем электропривода переменного тока, как асинхронных, так и синхронных, практически всегда в систему управления включают преобразователи фаз 3/2 и 2/3 [2].
Первый (3/2) преобразовывает фазные напряжения трёхфазной системы в напряжения двухфазной системы в координатах а, /1. Отмстим, что как трёхосная координатная система А, В, С, так и двухосная а, [} являются неподвижными системами. Пространственный вектор изображает результат совместного действия трёхфазной системы токов любой эквивалентной т — фазной и, в частности, двухфазной системы. Переход к двухфазной системе в математическом отношении эквивалентен рассмотрению пространственного вектора в новой прямоугольной системе координат а, [1. Физический смысл такого преобразования координат состоит в замене реальной трёхфазной машины эквивалентной двухфазной моделью, характеризующейся тем же значением пространственного вектора. Такая замена переменных широко используется при математическом исследовании электрических машин с целью упрощения систем дифференциальных уравнений электрического равновесия статорных и роторных цепей.
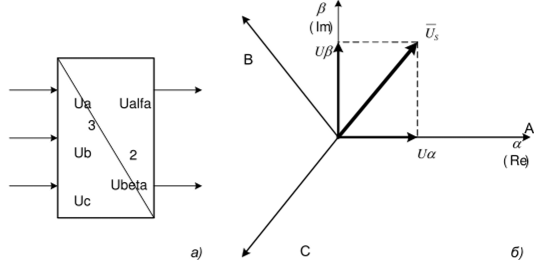
Рис. 1.39. Преобразование координат: а) условное графическое обозначение преобразователя: б) координаты
Преобразователь (3/2) осуществляет преобразование трёхфазных напряжений UA, UB, Uc (1.10) в двухфазные напряжения U№ Up в соответствии с выражениями (1.11) и (1.12):
После преобразования (1.18) получим.

При этом следует иметь в виду, что фазная ось а прямоугольной (двухфазной) системы совмещена с фазной осью А трёхфазной системы (рис. 1.39, б).
На рис. 1.40 показана модель преобразователя (3/2) в Simulink (Matlcib) [2].
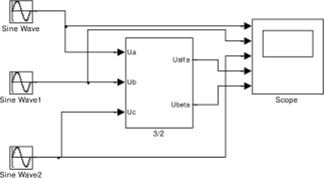
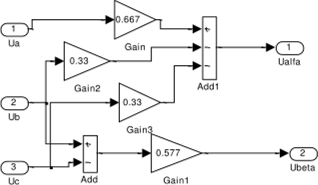
Рис. 1.40. Модель преобразоватечя (3/2) (Figl40)
Амплитуда напряжения принята (/," = 1 В, частота со = 314 рад/сек (f= 50 Гц). Не трудно отметить, что пространственный вектор напряжения в координатах а, /3 описывается выражением (1.15), полученным для трёхфазной системы напряжений U =Um(sincaf- jcoscot). Из (1.15) следует, что в двухфазной системе напряжения вычисляются, как U а =Ums cot и U р = -Um coscot. Результаты расчета напряжений Ua и.
Ufj на модели позволяют сделать вывод, что пространственный вектор для трёхфазной и эквивалентной двухфазной систем одинаков и имеет выражение Us = Ume^
- ~'T/2
- — в уравнениях (1.31 и 1.32) фигурируют векторные величины, а в уравнениях (1.29 и 1.30) скалярные;
- — количество взаимосвязанных уравнений равно 16, а количество коэффициентов — 44;
- — коэффициенты взаимоиндукции между обмотками статора и ротора в уравнениях (1.30) являются функцией угла поворота ротора относительно статора, то есть уравнения (1.30) являются уравнениями с переменными коэффициентами;
- — уравнение (1.32) является нелинейным, так как в нем перемножаются переменные.
- — существенное упрощение системы уравнений предлагает применение пространственного вектора;
- — применение системы координат (например, вращающейся с произвольной скоростью) позволяет избавиться от переменных коэффициентов при описании процессов в асинхронном двигателе;
- — использование безразмерной формы записи системы уравнений упрощает структуру уравнений и сокращает затраты времени на моделирование.
На рис. 1.41 показан результат преобразования трёхфазиого напряжения в двухфазное.
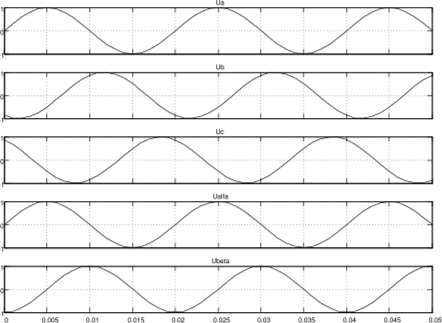
Рис. 1.41. Результаты преобразования 3-хфазной системы напряжений (U," = 1 В. /= 50 Гц) на модечи, показанной на рис. 1.40.
пространственного вектора У 5 на оси А, В. С. Выражения для фазных напряжений Ua, U в, Uс представляют действительную часть проекции пространственного вектора Us на фазные оси А, В, С.
В соответствии с этим, имеем [2]:
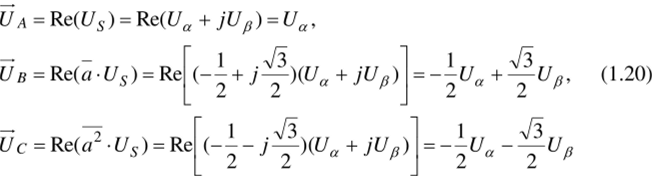
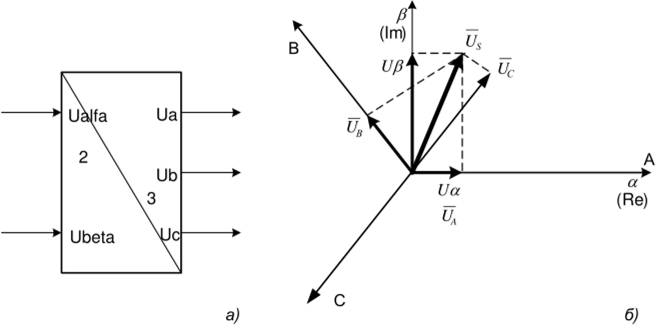
Рис. 1.42. Графическая интерпретация работы преобразователя (2/3): а) условное графическое изображение преобразователя (2/3), б) преобразование координат.
На рис. 1.42 показан процесс графического формирования мгновенного состояния векторов фазных напряжений Ua, Ug, Uc для произвольного положения пространственного вектора Us ?
Полученные выражения (1.20) использованы при разработке модели преобразователя фаз (2/3) в Simulink |2], показанной на рис. 1.43.
На рис. 1.44 показаны результаты моделирования эквивалентного обратного преобразования двухфазной системы в трёхфазную.
Так же приняты: амплитудное напряжение Um- 1 В и частота 50 Гц. На выходе получена трёхфазная система напряжений с прямым чередованием фаз.
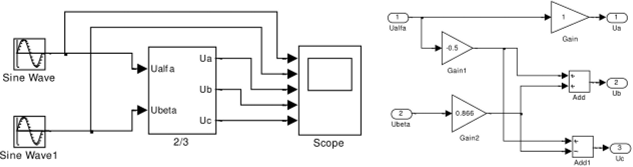
Рис. 1.43. Модель преобразователя фаз с раскрытой подсистемой 2/3 (Figl43)
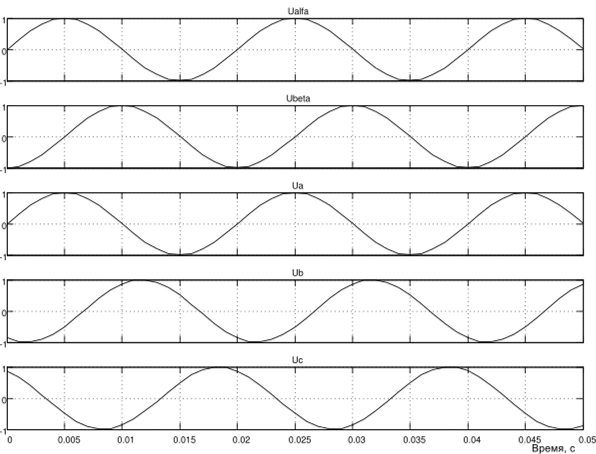
Рис. 1.44. Результаты моделирования работы преобразователя фаз (2/3)
Вращающаяся система координат в общем случае может перемещаться относительно неподвижной с произвольной скоростью сок. Мгновенное положение такой системы координат относительно неподвижной определяется углом у между вещественными осями систем координат. Положение пространственного вектора напряжения во вращающейся системе координат можно определить путем его поворота на угол у против направления вращения. Поэтому между выражениями пространственного вектора Us в неподвижной и Usk во вращающейся системах координат имеют место следующие соотношения [2]:
Математическая основа преобразования координат поясняется на рис. 1.45.

В неподвижной системе координат (а, /?) пространственный вектор напряжения может быть представлен в алгебраической и показательной форме Us=Ua + jUp=Umejv.
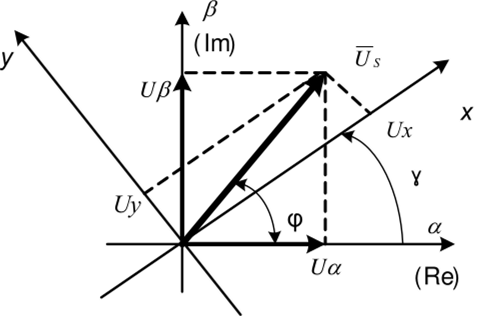
Рис. 1.45. Преобразование координат
Аналогично в системе вращающихся координат (х, у) тот же самый вектор может быть представлен в виде:

Из выражения (1.22) получаем уравнения перехода от неподвижной системы координат к вращающейся:

Аналогично получаем уравнения перехода от вращающейся системы координат к неподвижной с учетом (1.21):

Тогда.

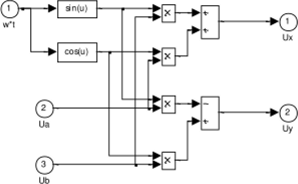
На рис. 1.46 представлена модель преобразователя неподвижной системы координат во вращающуюся, реализованную по уравнениям (1.23).
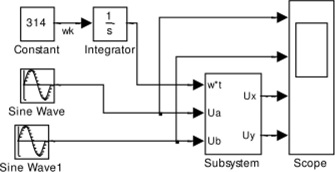
Рис. 1.46. Модель преобразователя из неподвижной системы координат во вращающуюся, схема Subsystem (Figl46)
На рис. 1.47 представлены результаты моделирования. На экране осциллоскопа представлены синусоидальные напряжения Ua и Ub в неподвижной системе и постоянные напряжения Ux = 0, Uy = -1 во вращающейся, подтверждающие предположение, сделанное ниже.
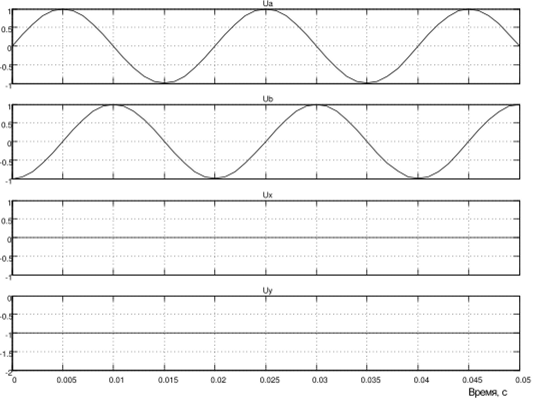
Рис. 1.47. Результаты моделирования
На вход модели поданы проекции пространственного вектора напряжения на оси (а, /?) в виде синусоидальных напряжений частоты 314рад/сек и текущий угол поворота координатной оси от блока.
Integrator. Угол y = cokt, где wk представляет частоту вращения системы координат. Частота вращения в рад/сек задаётся константой на входе интегратора. Следует заметить, что в этом случае на вход модели подаются синусоидальные функции времени с частотой 314 рад/сек в неподвижной системе координат и задаётся вращение координат с частотой 314 рад/сек. Следовательно, на выходах Ux, Uy должны получиться неподвижные векторы, характеризуемые постоянными величинами на выходах Ux и Uy. Преобразователь координат реализован в блоке Subsystem, содержание которого представлено на рис. 1.46.
Если частоту вращения координат сок задать отличной от частоты входного напряжения, то на выходе преобразователя появляются синусоидальные напряжения разностной частоты со — сок. Следовательно, пространственный вектор вращается во вращающейся системе координат с частотой (о — сок.
Аналогичная модель строится и для преобразования переменных в вращающейся системе координат в неподвижную в соответствии с уравнениями (1.24) [2].
Па рис. 1.48 представлена модель преобразователя вращающейся системы координат в неподвижную, реализованную по уравнениям (1.24). На вход модели поданы проекции пространственного вектора напряжения на вращающиеся оси (х, у) и текущий угол поворота системы координат. На выходе модели получены составляющие пространственного вектора (Ua, Ub) в неподвижной системе координат. Преобразователь координат реализован в блоке Subsystem, содержание которого представлено на рис. 1.48.
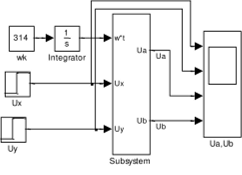
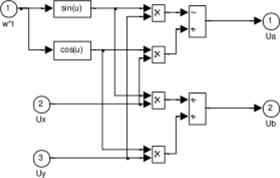
Рис. 1.48. Модель преобразователя вращающихся координат в неподвижные, схема блока Subsystem (Figl48)
На рис. 1.49 представлены результаты моделирования. Напряжения Uи, U/, видны на экране осциллоскопа. Следует заметить, что в этом случае на вход интегратора подаётся сигнал частоты вращения координат 314 1/с, и на выходе получаются синусоидальные напряжения частотой 50 Гц.
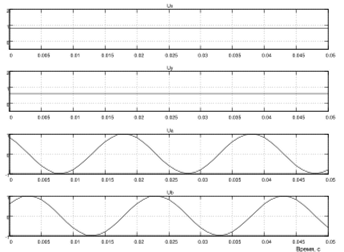
Рис. 1.49. Результат моделирования процесса преобразования вращающихся координат в неподвижные
Между выражениями пространственного вектора Us в неподвижной и U sk во вращающейся системах координат имеют место соотношения (1.21).
Второе уравнение (1.21) используется обычно для замены переменных при переходе к новой системе координат, а первое — для выражения в новой системе координат возмущающих функций, описанных переменными прежней системы.
Например, уравнение электрического равновесия цепи статора, записанное через обобщенные векторы напряжений, токов и потокосцеплений в неподвижной системе координат, имеет вид:

где Us =UmeJ (0" !; со0 — угловая частота питающей сети.
То же уравнение в системе координат, вращающейся со скоростью ротора <�у,., когда сок =ыг и y = cort, согласно второго уравнения (1.21):
будет иметь вид:

Распишем производную сложной функции.

и подставим в выражение (1.26):

Сократив левую и правую часть полученного выражения на e^, окончательно получим уравнение электрического равновесия во вращающейся системе координат

где (/" согласно первого выражения (1.21) следует определить как

В приведенном уравнении (1.27) индекс к указывает на замену переменных в связи с переходом к новой системе координат. В дальнейшем, если переход к новой системе координат поясняется сопровождающим текстом, индекс А: для упрощения записи будет опущен. При этом пространственный вектор будет определен как выражение (1.28).
В теории электромагнитных переходных процессов электрических машин применяются обычно три координатные системы, являющиеся частными случаями координатной системы, вращающейся с произвольной скоростью сок: система координат d, q, неподвижная относительно ротора и вращающаяся вместе с ротором (сок = сог); система координат а, // неподвижная относительно статора (а>к =0); система координат х, у вращающаяся в пространстве с произвольной скоростью (ок. Замена переменных в уравнениях электрического равновесия машины производится с целью исключения периодически изменяющихся коэффициентов в уравнениях потокосцеплений. Достижение поставленной цели возможно только в том случае, если новая система координат неподвижна относительно цепей, обладающих электрической или магнитной несимметрией.
Поэтому систему координат d, q, используют преимущественно для исследования режимов синхронных машин, а систему а, /? — для исследования режимов асинхронных машин. Систему координат х, у целесообразно использовать только для исследования симметричных режимов асинхронных машин, если ес применение приводит к упрощению описаний возмущающих воздействий. Например, пространственный вектор питающего двигатель напряжения в системе координат а, /? имеет вид:

а при переходе к системе координат х, у, вращающейся со скоростью сок = (о0, это напряжение согласно (1.21), преобразуется к виду U s = Um.
Рассмотрим описание процессов в абсолютных единицах. Обобщенная асинхронная машина показана на рис. 1.50.

Рис. 1.50. Обобщенная асинхронная машина
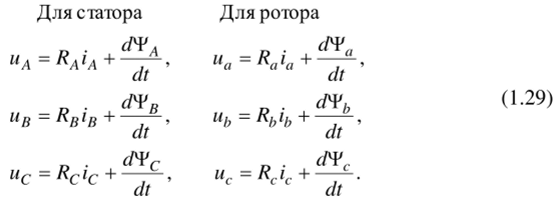
Машина содержит трехфазную обмотку на статоре и трехфазную обмотку на роторе. Обмотки статора и ротора подключены к симметричным трехфазным источникам напряжения. Уравнения равновесия э.д.с. на обмотках статора и ротора базируются на втором законе Кирхгофа [2].

В уравнениях (1.29) фигурируют мгновенные напряжения, гоки и потокосцепления статора и ротора, а также активные сопротивления обмоток. Обычно обмотки выполняются симметричными, и поэтому Ra-Rb-Rc-Rs — активное сопротивление статорной обмотки, Ra — Ri, = Rс — Rr — активное сопротивление роторной обмотки.
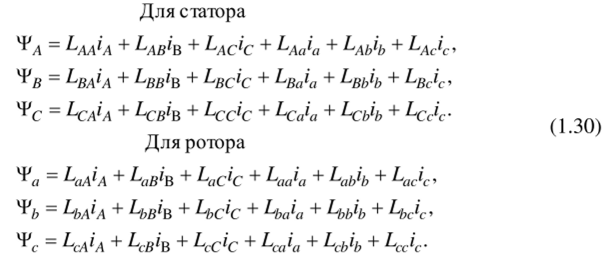
Вторым используемым законом является закон Ампера, который связывает потокосцепления обмоток с токами, протекающими по обмоткам:
Уравнения для определения потокоспеплений показывают, что потокосцепление каждой обмотки зависит от токов во всех обмотках; зги зависимости проявляются через взаимоиндукцию. В уравнениях (1.30) LAa, Lbb, Leo Laa, Lbb, Lcc являются собственными индуктивностями соответствующих обмоток, все остальные — взаимоиндуктивностями между соответствующими обмотками.
Третьим законом, лежащим в основе анализа, является второй закон Ньютона — закон равновесия моментов на валу машины:

где J (кГм2) — момент инерции на валу машины, учитывающий инерционность как самой машины, так и приведенной к валу инерционности рабочего механизма и редуктора; соп,(рад/с) — угловая скорость вала машины; Мс (Нм) — момент сопротивления рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
Наконец, четвертым и последним законом, лежащим в основе анализа машины, является закон, сформулированный Ленцем, как правило левой руки. Этот закон связывает векторные величины момента, потокосцепления и тока:

Отметим, что, несмотря на полное и строгое математическое описание, использование уравнений (1.29)—(1.32) для исследования машины встречает серьезные трудности.
Перечислим основные:
На пути упрощения математического описания асинхронной машины, да и вообще всех машин переменного тока, удачным оказался метод пространственного вектора [4], который позволил существенно упростить и сократить вышеприведенную систему уравнений; метод позволяет связать уравнения (1.29−1.32) в единую систему с векторными переменными состояния. Суть метода состоит в том, что мгновенные значения симметричных трехфазных переменных состояния (напряжения, токи, потокосцепления) можно математически преобразовать так, чтобы они были представлены одним пространственным вектором.
Для преобразования уравнений (1.29) в мгновенных значениях к уравнениям в пространственных векторах умножим их на выражения: первые уравнения для фаз А и а на 2/3, вторые для фаз В и b — на 2/3а, третьи для фаз С и с — на 2/3 а , и сложим раздельно для статора и ротора. Тогда получим:
где L" Lr — собственные индуктивности статора и ротора; Lm(в) — взаимная индуктивность между статором и ротором.
Таким образом, вместо двенадцати уравнений (1.29, 1.30) получено лишь четыре уравнения (1.33).
Переменные коэффициенты взаимной индукции в уравнениях для потокосцеплений (1.33) являются результатом того, что уравнения равновесия эдс для статора записаны в неподвижной системе координат, связанной со статором, а уравнения равновесия эдс для ротора записаны во вращающейся системе координат, связанной с ротором. Метод пространственного вектора позволяет записать эти уравнения в единой системе координат, вращающейся с произвольной скоростью ык. В этом случае уравнения (1.33) преобразуются к виду:
гдеcom — частота вращения ротора; p — число пар полюсов в машине.
В уравнениях (1.34) все коэффициенты являются величинами постоянными, имеют четкий физический смысл и могут быть определены по паспортным данным двигателя, либо экспериментально.
Момент в уравнении (1.32) является векторным произведением любой пары векторов. Из уравнения (1.34) следует, что таких пар может быть шесть (is, iK); (Ts,^*); (is,'Vs); (is^r); (ir^s); (ir^s) — Часто в рассмотрение вводится иотокосцеиление взаимной индукции ЧЛи = Lm(is + /'/?). В этом случае появляется ещё четыре возможности представления электромагнитного момента машины через следующие пары: (is.'f'm); (г", Ч'ш); ('Fs.'FmA (Ч-'я.Ч'ш). После выбора той или иной пары уравнение момента приобретает определенность, а количество уравнений в системе (1.34) сокращается до двух.

Кроме того, в уравнениях (1.31) и (1.32) векторные величины момента и скорости могут быть заменены их модульными значениями. Это является следствием того, что пространственные векторы токов и потокосцеплений расположены в плоскости, перпендикулярной оси вращения, а векторы момента и угловой скорости совпадают с осью. В качестве примера покажем запись уравнений момента через некоторые пары переменных состояния машины (1.35).
Приведём описание в относительных единицах.
На этом этапе уравнения (1.31), (1.34) и (1.35) приводятся к безразмерным (относительным) величинам [2]. В качестве основных базовых величин выбираются амплитудные номинальные значения фазного напряжения и тока, а также номинальное значение угловой частоты: 
на этой основе определяются базовые значения всех переменных и коэффициентов, входящих в уравнения, а также базового времени:
Обобщенная система уравнений для описания асинхронной машины принимает вид:
В этих уравнениях все переменные относительные, полученные как результат деления реальных значений на базовые, все коэффициенты также безразмерные, полученные аналогично.
Переменные и параметры в относительных единицах:
-и — / - Ф.
и =—, i=—, у/=— - относительные электромагнитные переменяй h %.
ные состояния;
ОЛ _ (О
ак = —-, Эт =-ш- — относительная частота вращения системы коорди;
Щ, Щ>
нат и относительная частота вращения ротора;
М
т =—относительный момент на валу машины;
г =^, г = **-, х = 3*3. г xR =^, Хт=^, Тт — относи;
я* /?" м"
тельные (безразмерные) параметры.
Расчет параметров асинхронной машины приведен ниже.
В уравнениях (1.38) время принято безразмерным t = — = coht, и.
h
единицей измерения времени является не секунда, a th = —. Следует.
(0Ь
заметить, что введение относительных величин существенно сокращает время моделирования и позволяет устранить многие проблемы при моделировании.
Выводы: