Замкнутые реверсивные.
Компьютерное моделирование систем электропривода постоянного и переменного тока в simulink

Пуск и реверс произведён с таким знаком активного момента нагрузки, что двигатель работает в режиме генераторного торможения. Привод отработал задание чётко. Недостаток привода состоит в значительных пульсациях тока, вызванных применением нулевой трёхфазной схемы выпрямления. Наиболее существенно пульсации сказываются при управлении в «малом». На рис. 2.41 продемонстрированы результаты… Читать ещё >
Замкнутые реверсивные. Компьютерное моделирование систем электропривода постоянного и переменного тока в simulink (реферат, курсовая, диплом, контрольная)
Тиристорные электроприводы с совместным управлением по нулевой схеме включения
Преобразователи были рассмотрены в подразделе 1.4. Берём готовую схему (рис. 1.123) и соответствующий файл Figl123 и разработаем регулируемый реверсивный электропривод, схема модели которого представлена на рис. 2.34.
Реверсивный тиристорный преобразователь выполнен не базе мостовой трёхфазной схемы Universal Bridge, запитан от вторичной обмотки силового трансформатора, управление от линейных СИФУ, диапазон управления ±10 В.
Привод состоит из реверсивного тиристорного преобразователя, включенного по нулевой схеме, электродвигателя и схемы управления. Привод выполнен по одноконтурной схеме и имеет обратную связь по частоте вращения. Формирование пусковых токов производится ограничением скорости нарастания выходного напряжения регулятора частоты вращения. Такой способ управления целесообразен с точки зрения исключения аварийных режимов при совместном согласованном управлении.
Для управления частотой вращения применён ЯЯ-регулятор скорости (Speed PI Controller). Управление группами ведётся с помощью блоков Saturation Dynamic, ограничение основного сигнала, проходящего через блок, производится напряжением по входам Up и 1о.
Ограничению подвергается верхняя часть управляющей диаграммы (положительное напряжение). Это связано с характером управления вентильными группами: при положительном напряжении управления группы работают поочерёдно в выпрямительном режиме. По этому на входы 1о блоков Saturation Dynamic подано неизменное напряжение минус 10 В, разрешая проходить отрицательным напряжениям управления без ограничения.
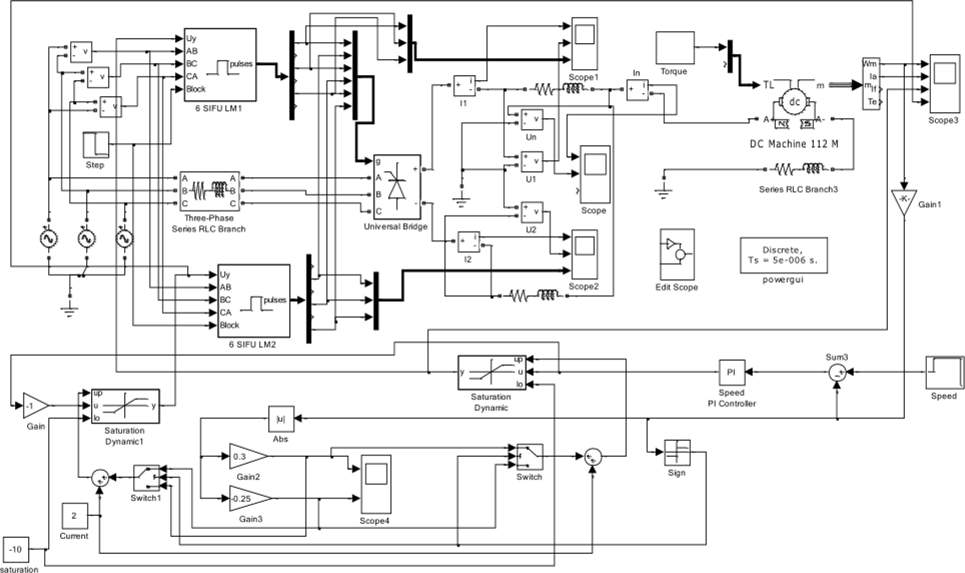
Рис. 2.34. Виртуальный тиристорный электропривод с согласованным управлением (Fig234)
Управление ограничением организовано от двух каналов: первый на основе усилителя Gciin2 формирует токовую пусковую диаграмму при пуске, второй — на основе усилителя Gain3 формирует токовую тормозную диаграмму при торможении до нулевой частоты вращения при останове или реверсе. Так как пуск и торможение выполняются на любое направление, то предусмотрен выпрямитель Abs, позволяющий реализовать каналы ограничения для любого направления движения. Для того, чтобы каналы были подключены нужным образом в зависимости от знака частоты вращения использован блок определения знака частоты вращения Sign и два переключателя Switch. При положительном напряжении сигнала обратной связи блок Sign выдаёт по выходу «1», при отрицательном — «-1». Переключатели программируются на «1»: при положительном знаке частоты вращения первый канал ограничения подключен к входу Up блока Saturation Dynamic, а второй — к входу Up блока Saturation Dynamic 1. При нулевой или отрицательной частоте вращения подключение каналов обратное.
Задаёт программу управления частотой вращения привода таймер Speed, а таймер Torque — программу управления нагрузкой.
Блок Current задаёт начальное значение пускового и тормозного токов. Ток задаётся в напряжении управления преобразователем (В) и имеет положительный знак. Минимальное значение 1 В, а максимальное 5−6 В. Порядок настройки состоит в следующем:
- — на блоке Current выставляется минимальное значение, например, 1 В, коэффициент усиления первого канала Gain2 — нулевое значение, второго канала Gain3 — например, минус 2−2,5;
- — управление скоростью осуществляется в «большом», например, 5- 10 В, в блоке Speed даётся указание на пуск и реверс в любом направлении;
- — выполняются сеансы моделирования и настраивается коэффициент усиления первого канала таким образом, чтобы пусковой ток в начале диаграммы нс превышал начального значения, заданного блоком Current',
- — коэффициент усиления второго блока настраивается в момент торможения, например, при останове или реверсе. Целесообразно настраивать при реверсе, подгоняя значение тормозного тока под уже выставленное пусковое значение.
Выполним моделирование разработанной схемы, представленной на рис. 2.34. Задания на частоту вращения и нагрузку представлены на рис. 2.35.
На рис. 2.36 представлены параметры двигателя и регулятора частоты вращения.
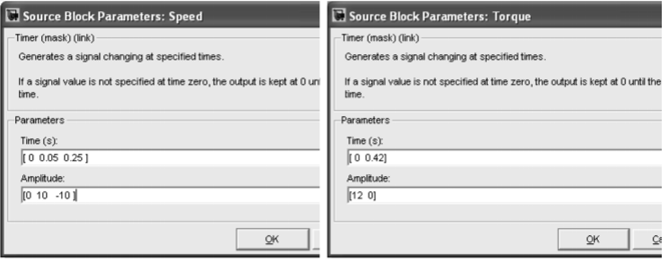
Рис. 2.35. Задания на частоту вращения и нагрузку
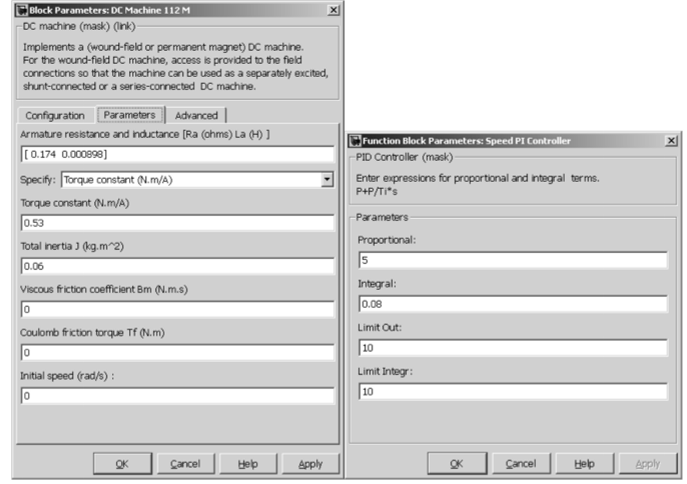
Puc. 2.36. Параметры двигателя и регулятора частоты вращения.
Двигатель с постоянными магнитами, поэтому в этом случае коэффициент Laf = С. Параметры регулятора частоты вращения представлены коэффициентом усиления Proportional и постоянной времени интегрирования Integral. Limit Out — ограничение выходного напряжения регулятора, Limit Integr — ограничение интегратора регулятора.
Программа переключений каналов шраничения Gain2 и Gain3 показана на рис. 2.37.
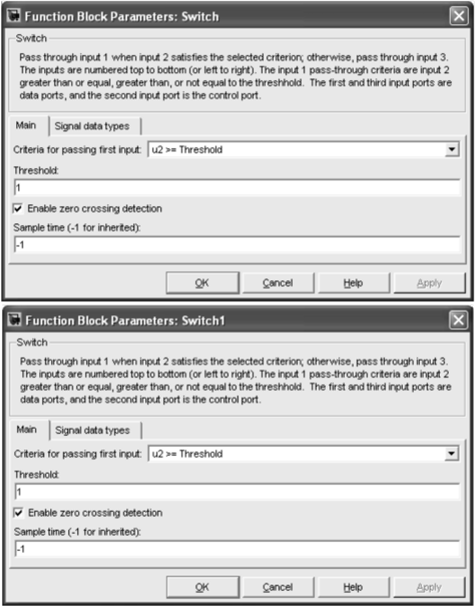
Рис. 2.37. Настройка переключателей Switch и Switch 1
Все остальные настройки схемы управления приводом показаны на рис. 2.34.
На осциллографе Scope3 регистрируются четыре сигнала: частота вращения, ток двигателя, напряжение управления первой вентильной группой (Saturation Dynamic) и напряжение управления второй вентильной группой (Saturation Dynamic]).
На рис. 2.38 представлены результаты моделирования управления на ±10 В при реактивной нагрузке 12 Нм. Привод отработал заданную частоту вращения 52,5 1/с, пусковые и тормозные токи составили значение 70−75 А, при сбросе нагрузки в момент времен 0,42 с частота вращения достаточно быстро восстановилась до заданного значения.
На рис. 2.39 показаны результаты моделирования управления на ±10 В при активной нагрузке 12 Нм. Для того чтобы привод работал в режиме генераторного торможения, была сформирована программа, показанная на рис. 2.40.

Рис. 2.38. Моделирование управления на ±10 В при реактивной нагрузке 12 Им
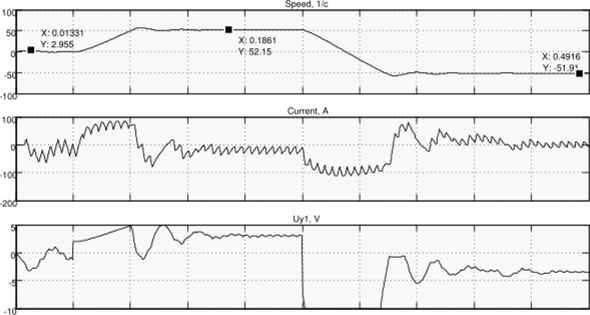

Рис. 2.39. Результаты моделирования управления на ±10 В при активной нагрузке 12 Нм
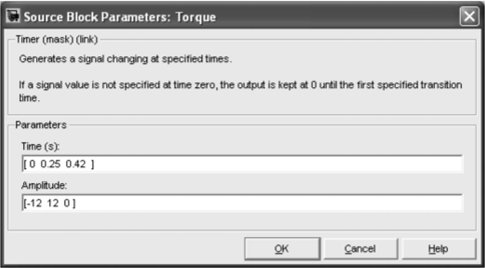
Рис. 2.40. Программа формирования активного момента нагрузки
До момента времени 0,05 с, действовали нулевое задание по частоте вращения и активный момент минус 12 Нм.
Привод отработал это задание: частота вращения увеличилась до плюс 2,955 1/с и вернулась на нулевое значение, а момент двигателя увеличился до минус 12 Нм, чтобы удержать двигатель на нулевой частоте вращения.

Рис. 2.41. Результаты моделирования управления на ±0,05 В при реактивной нагрузке 12 Нм
Пуск и реверс произведён с таким знаком активного момента нагрузки, что двигатель работает в режиме генераторного торможения. Привод отработал задание чётко. Недостаток привода состоит в значительных пульсациях тока, вызванных применением нулевой трёхфазной схемы выпрямления. Наиболее существенно пульсации сказываются при управлении в «малом». На рис. 2.41 продемонстрированы результаты моделирования управления на ±0,05 В при реактивной нагрузке 12 Нм.
Электропривод отработал поданное задание достаточно чётко, но пульсации частоты вращения весьма ощутимы.
В заключение отметим, что электроприводы с совместным управлением в недалёком прошлом находили применение и обеспечивали диапазон регулирования около 500.