Замкнутые нереверсивные.
Компьютерное моделирование систем электропривода в simulink
Для реализации контура необходимо иметь дополнительную информацию по используемому двигателю, что бы построить зависимость предельного (пускового) значения тока от частоты вращения. Полученный график разбивается на линсйно-ломанныс отрезки и координаты точек перегиба вводятся в окна настроек блоков PreLookup, Interpolation (n-D), показанные на рис. 2.13. Сумматор Sum2 вырабатывает сигнал разности… Читать ещё >
Замкнутые нереверсивные. Компьютерное моделирование систем электропривода в simulink (реферат, курсовая, диплом, контрольная)
Тиристорные элект роприводы
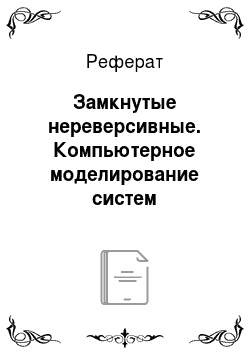
На рис. 2.12 показана разработанная схема модели тиристорного электропривода по структуре 3 [7] (двухконтурная с подчинённым регулированием параметров).
Внешним контуром является контур обратной связи по скорости. Задающий сигнал скорости через фильтр Transfer Fen поступает на сумматор Sum3, сравнивается с сигналом обратной связи по частоте вращения, и разность поступает на вход Я//-регулятора скорости PI Controller!. Выходной сигнал регулятора скорости через блок ограничения Saturation Dynamic задаёт ток двигателя. Максимальное значение ±10 В, задаваемое в блоке PI ControllerУ, соответствует предельному значению тока двигателя. Дополнительное уменьшение максимального выходного напряжения регулятора скорости осуществляет контур зависимого токоограничения PreLookup, Interpolation (n-D).
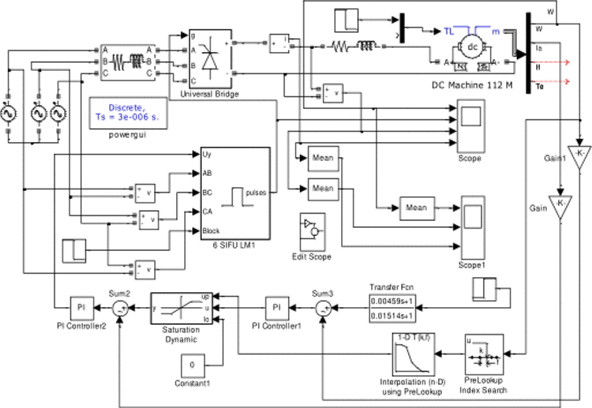
Рис. 2.12. Схема модели нереверсивного тиристорного электропривода.
(Fig2J2)
Для реализации контура необходимо иметь дополнительную информацию по используемому двигателю, что бы построить зависимость предельного (пускового) значения тока от частоты вращения. Полученный график разбивается на линсйно-ломанныс отрезки и координаты точек перегиба вводятся в окна настроек блоков PreLookup, Interpolation (n-D), показанные на рис. 2.13.
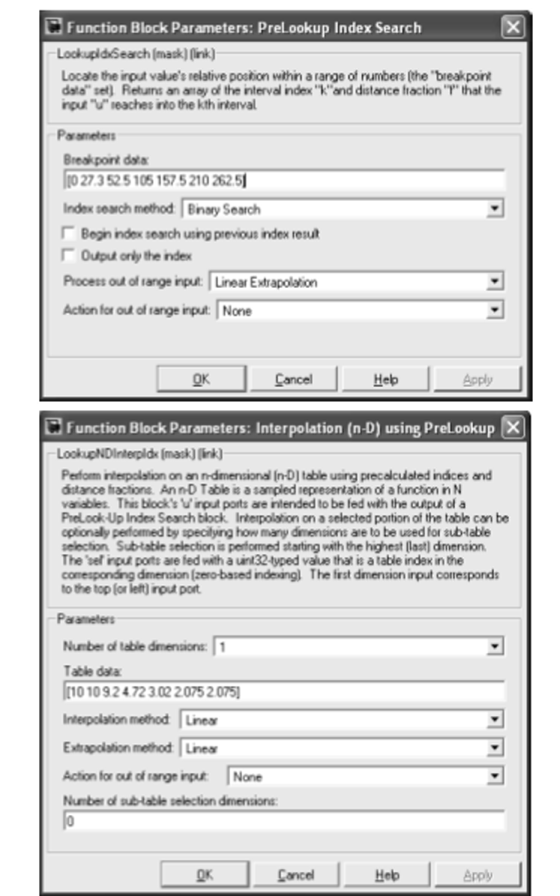
Рис. 2.13. Окна настроек блоков PreLookup. Interpolation (n-D).
В блок PreLookup вносятся частоты вращения точек перегиба, а в блок Interpolation (n-D) — максимальные выходные напряжения регулятора скорости, которые будут воспроизведены блоком ограничения Saturation Dynamic.
Сумматор Sum2 вырабатывает сигнал разности между задающим и действительным значением тока двигателя, который подастся на вход регулятора тока PI Controller2. Регулятор тока PI Controlled, тиристорный преобразователь Universal Bridge с управлением (6 SIFU1М1) и двигатель DC Machine 112 М образуют подчиненный (внутренний) контур.
Напомним, что блоки 6 SIFU LM, PI Controller были модернизированы и не входят в состав библиотеки Simulink. Если двигатель с постоянными магнитами, то коэффициент Laj= С = КЕ Ф = КМ Ф и при включении двигателя в сеть магнитный поток будет номинального значения.
На рис. 2.14 и 2.15 представлены результаты моделирования пуска привода на минимальную частоту вращения.
Рис. 2.14. Моделирования пуска на минимальную частоту вращения
На рис. 2.14 исследуемые параметры: частота вращения W, ток двигателя In и напряжение на двигателе Un представлены так, как они выглядят в действительности при измерении на реальном приводе. Если необходимо убрать пульсации и вести исследование по «гладкой» (усреднённой) составляющей, то последовательно с исследуемым сигналом необходимо включить блок усреднения Mean (рис. 2.15).
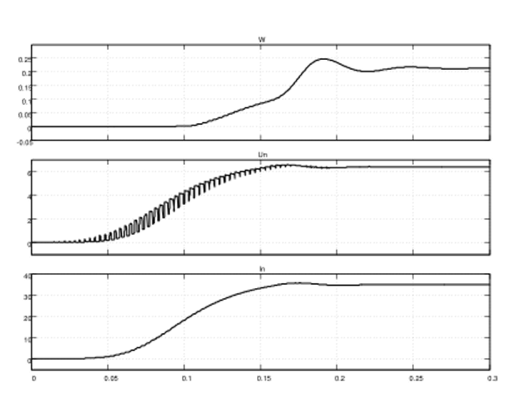
Рис. 2.15. Результаты моделирования пуска на минимальную частоту вращения (выделена гладкая составляющая с помощью блока усреднения Mean)
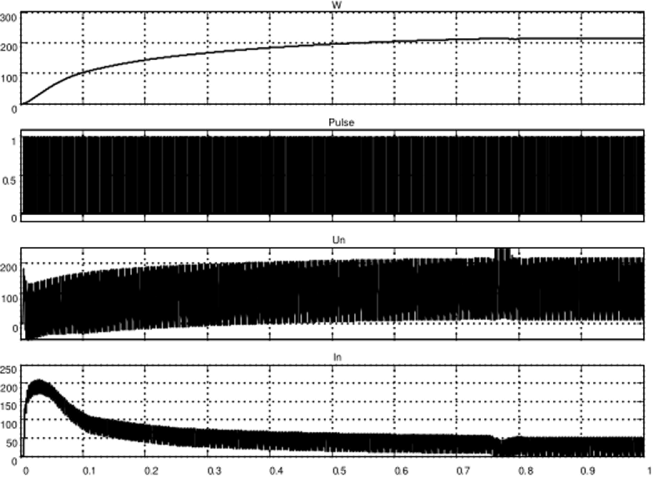
Рис. 2.16. Результаты моделирования пуска привода на максимальную скорость
Особенностью этого исследования (рис. 2.16) является снижение пускового тока по мерс роста частоты вращения двигателя. Максимальное значение пускового тока около 200 А имеет место до частоты вращения 50 1/с. Пуск протекает вяло и длится примерно 0,7 с. Наиболее полно высокие динамические свойства таких двигателей проявляются на частотах вращения, не превышающих 50 1/с.
Вопросы расчета параметров электропривода и регуляторов в данной работе нс рассматриваются, они достаточно подробно представлены в [7J.