Численный метод расчета статически определимых стержней при изгибе
Рассмотрим изгиб шарнирно закрепленного по концам стержня (рис. 7.5). Задача является статически определимой, что предполагает возможность предварительного определения закона изменения изгибающего момента Мизг (х). Рассмотрим метод решения линейной краевой задачи, называемый методом начальных параметров. Решение линейного векторно-матричного уравнения (7.18) можно представить в виде суперпозиции… Читать ещё >
Численный метод расчета статически определимых стержней при изгибе (реферат, курсовая, диплом, контрольная)
Описание численного метода начнем с решения уравнения второго порядка. Перепишем дифференциальное уравнение (7.5) в форме системы двух дифференциальных уравнений первого порядка, разрешенной относительно первых производных. Такая запись называется формой Коши и является удобной для перехода к векторно-матричной форме записи:

В векторно-матричной форме система будет выглядеть следующим образом:

Здесь {У} — вектор-столбец неизвестных функций; [Л] — матрица коэффициентов в дифференциальных уравнениях; {Т} — вектор-столбец свободных членов, или вектор нагрузок:

Однородная система уравнений, соответствующая системе (7.18), характеризуется нулевым вектором-столбцом свободных членов и имеет вид.

Система (7.18) интегрируется совместно с дополнительными условиями, количество которых соответствует порядку системы. В случае задания дополнительных условий на границе они называются граничными условиями.
В случае если все дополнительные условия заданы в начальной точке интегрирования, т. е. полностью известен начальный вектор (У (0)} = {У0}, решение системы (7.18) сводится к начальной задаче, известной как задача Коши. Решение задачи Коши находится посредством однократного численного интегрирования системы (7.18). Интегрирование проводится с использованием одного из известных методов, которые реализованы в виде программ для ЭВМ.
В случае если граничные условия заданы в разных точках интервала интегрирования, в частном случае — начальной и конечной точках, возникает краевая задача.
Общий метод решения краевой задачи заключается в нахождении недостающих компонент вектора {У0}, называемых начальными параметрами, и сведении краевой задачи к задаче Коши.
Рассмотрим метод решения линейной краевой задачи, называемый методом начальных параметров. Решение линейного векторно-матричного уравнения (7.18) можно представить в виде суперпозиции общего и частного решений:

где С — подлежащая определению константа; (У°(.г)} — вектор-функция общего решения однородного уравнения (7.20); (У*(х)} — вектор-функция любого частного решения неоднородного уравнения (7.18). Получение этих решений производится численным интегрированием соответствующих векторно-матричных уравнений.
Рассмотрим изгиб шарнирно закрепленного по концам стержня (рис. 7.5). Задача является статически определимой, что предполагает возможность предварительного определения закона изменения изгибающего момента Мизг(х).
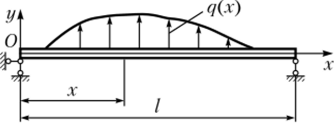
Рис. 75. Изгиб шарнирно закрепленного по концам стержня.
Из двух компонент начального вектора {У0} известна только одна — перемещение в точке О. Если бы нам был задан угол поворота начального сечения, то проблема была бы сразу сведена к задаче Коши. Однако угол поворота заранее неизвестен, зато задано дополнительное условие на правом краю стержня. Краевые условия задачи запишутся в виде.

Суть алгоритма заключается в сведении решения краевой задачи к последовательному решению начальных задач. Сформируем начальные условия, выполняя следующие правила.
- 1. При формировании начальных векторов для общего решения в позиции заданных компонентов непосредственно ставятся их известные значения.
- 2. Во все позиции неизвестных компонентов поочередно ставится единица, при этом остальные позиции неизвестных компонентов заполняются нулями.
- 3. Поскольку в качестве частного решения неоднородного уравнения может использоваться любое решение, для его нахождения используется нулевой начальный вектор.
Для рассматриваемой задачи достаточно сформировать только два начальных вектора для нахождения общего и частного решений соответственно, которые запишутся в следующем виде:

Поскольку перемещение в начальной точке известно (г;(0) = 0), в первой строке начального вектора для нахождения общего решения {F°(0)} поставлен нуль. Угол поворота в начальной точке неизвестен, поэтому во второй строке вектора поставлена единица. Начальный вектор для нахождения частного решения принят нулевым. При таком формировании начальных векторов граничное условие при х = 0 (7.22) удовлетворяется тождественно:
Отметим, что при представлении начальных векторов в такой форме постоянная С имеет смысл угла поворота начального сечения и подлежит определению. Для установления значения постоянной С рассмотрим значение вектора-решения на другом конце стержня, полученное в результате двукратного интегрировании уравнений (7.18) и (7.20) с начальными векторами (7.23) соответственно:

Согласно граничному условию на правом конце Cv°(l) + v*(l) = 0, откуда находим.
После нахождения С проводится чистовое интегрирование с начальным вектором.
позволяющее определить вектор {У (х)} в любом сечении стержня.
Аналогично рассматриваются и другие виды опор однопролетного стержня в случаях его статической определимости.