Использования структурных схем для моделирования систем автоматизированного управления
Несколько особое место среди критериев устойчивости САУ занимает критерий Найквиста-Михайлова. Этот критерий позволяет судить об устойчивости замкнутой по АФЧХ разомкнутой САУ, которая может быть получена расчетным путем с использованием передаточной функции системы. Используя правила преобразования структурных схем представленных в таблице 1.3, приведем структурную схему к простейшему виду… Читать ещё >
Использования структурных схем для моделирования систем автоматизированного управления (реферат, курсовая, диплом, контрольная)
Задача № 1. Правила использования структурных схем для моделирования САР Шифр 821 (три последние цифры).
Задача решается в соответствии пособия.
1. По последней цифре шифра выбираем структурную схему:
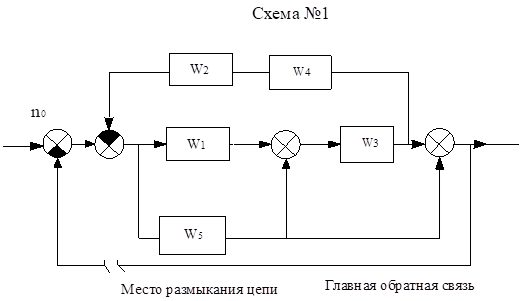
Рис. 1.
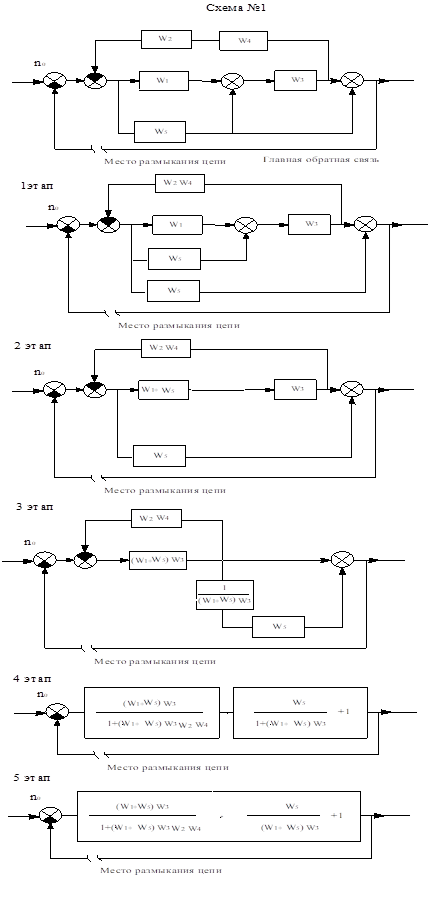
- 2. Используя правила преобразования структурных схем представленных в таблице 1.3, приведем структурную схему к простейшему виду — одному элементу с результирующей передаточной функцией (см. рис. 2). На рис. приводятся этапы преобразований.
- 3. Выражения для эквивалентных (результирующих) передаточных функций САУ в разомкнутом и замкнутом состояниях — и

Передаточная функция разомкнутой будет иметь вид Передаточная функция замкнутой будет иметь вид.




4. В соответствии с табл.1.1 выбираем соответствующие значения передаточных функций и подставляем их в соотношения для полученных передаточных функций и. Выбор осуществляется по предпоследней цифре шифра.
Значения передаточных функций представлены в таблице 1.1.
Таблица 1.1.
Предпоследняя цифра шифра. | W1 | W2 | W3 | W4 | W5 | W6 | W7 |
 k2 | k5 | k6p. | k7 |
Проведем подстановки значений передаточных функций в соотношения передаточных функций и .


5.
Записать уравнения динамики САР в операторной форме и в форме линейного дифференциального уравнения.
Рис. 2. Преобразование структурной схемы к простейшему видуУравнение динамики разомкнутой САР в операторной форме
где.

Уравнение динамики разомкнутой САР в форме линейного дифференциального уравнения.

Уравнение динамики замкнутой САР в операторной форме.

.
где коэффициенты представлены выше.
Уравнение динамики замкнутой САР в форме линейного дифференциального уравнения.

где nвыходной сигнал; где n0 — выходной сигнал автоматизация регулятор оборот раус Задача № 2. Построение динамических моделей типовых регуляторов оборотов ГТД.
1. Типовая принципиальная схема САР оборотов ГТД выбирается по последней цифре шифра в соответствии с таблицей 2.1. Последняя цифра шифра 0. Имеем статический регулятор прямого действия.
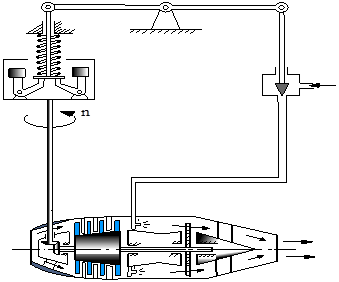
Рис. 2. Статический регулятор прямого действия
Функциональная схема астатического непрямого действия регулятора без обратной связи показана на рис. 3.
x2— выходной сигнал (либо n).
3. Для каждого элемента функциональной схемы записываем уравнение динамики и передаточной функции. В уравнениях динамики переменные должны соответствовать входным и выходным величинам, показанным на структурной схеме. Уравнения динамики типовых звеньев сведены в таблицу 2.2 [1].
Таблица 2.1.
№. | Название звена. | Уравнения динамики. |
1. | Чувствительный элемент (ЧЭ). | |
2. | Преобразующий элемент (ПЭ). | |
3. | Гидравлический усилитель без обратной связи (УЭ). | |
 4. | Регулирующий орган (РО). | |
5. | Объект регулирования. |
4. Структурная схема. Используя, данные таблицы 2.2 запишем передаточные функции типовых звеньев. Передаточная функция для типового звена, описываемого дифференциальным уравнением выводится с помощью формулы (1).

(1).
Передаточные функции типовых звеньев представлены в таблице 2.2.
Таблица 2.2.
№. | Название звена. | Обозначение передаточной функции. | Передаточные функции отдельных звеньев. |
1. | Чувствительный элемент (ЧЭ). | W1(p). | |
 2. | Преобразующий элемент (ПЭ). | W2(p). | kп |
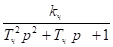
3. | Регулирующий орган (РО). | W5(p). | kp |
4. | Объект регулирования. | W6(p). |

Структурная схема будет иметь вид:
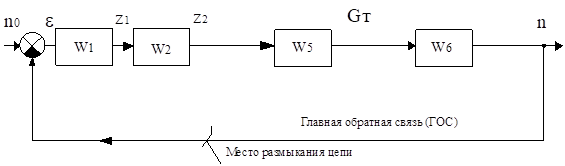
Рис. 4. Структурная схема
Используя правила преобразования структурных схем, находим передаточные функции замкнутой и разомкнутой систем регулирования.
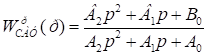
Передаточная функция разомкнутой САР будет иметь вид.


Передаточная функция замкнутой САР будет иметь вид.


5. Уравнения динамики замкнутой и разомкнутой САР в форме обыкновенных линейных дифференциальных уравнений.
Дифференциальное уравнение разомкнутой САР в общем виде.

где А3=.
А2=.
А1=.
А0=1.
В0=.




Дифференциальное уравнение замкнутой САР в общем виде.

где А3=.
А2=.
А1=.
А0=1+.
В0=.
6. По таблице 2.3. и 2.4. [1] значения постоянных коэффициентов (времени и усиления) подставляем в уравнения динамики САР и оцениваем устойчивость. Устойчивость целесообразно оценивать по алгебраическим критериям.
Численные значения коэффициентов уравнений Таблица 2.3.
Предпоследняя цифра шифра. | |||||
0,7. | 1,0. | 0,4. | 1,5. |
Численные значения коэффициентов уравнений Таблица 2.4.
Последняя цифра шифра. | ||||||
1,3. | 0,8. | 5,2. | 0,6. | 0,8. | 1,2. |
Проведем оценку устойчивости разомкнутой системы САР с помощью алгебраических критериев Рауса и Гурвица. Раус и Гурвиц показали, что САУ (система автоматического управления) или САР, описываемая характеристическим уравнением.

.
будет устойчива, если при Аn>O все «n» определители Гурвица (Дn) будут положительны, т. е.

и т.д.
3,64. | р3+. | 5,90. | р2+. | 6,20. | р+. | 8,8. |
Произведем оценку по данному критерию устойчивости.

Составим определитель Гурвица Д Определим все диагностические миноры.
1=6,2.

- 4,548
- 16,555
Т.о. САР по критерию РаусаГурвица устойчива, т.к. А3=3,64>0 и все диагональные миноры положительны.
Задача № 3. Оценка устойчивости разомкнутых и замкнутых САР Оценить устойчивость работы систем автоматического управления авиационных ГТД.
Выбор вариантов — по трем последним цифрам шифра зачетной книжки.
Последние три цифры шифра 821.
Исходные данные:
Коэффициенты уравнения динамики чувствительного элемента (ЧЭ) выбираются по таблице 3.1. по последней цифре шифра -1.
=1,27, 0,92, 0,61.
Коэффициенты уравнения динамики преобразующего элемента (ПЭ) и регулирующего органа выбираются по таблице 3.2. по предпоследней цифре шифра- 2.
0,9; 1,1.
Коэффициенты уравнения динамики ГТД объекта регулирования (ОР) выбираются по третьей с конца номера зачетной книжки в соответствии с таблицей 3.3. — 8.
=0,22, 0.95.
1. Используя функциональную схему (рис. 3.1) и структурную схему (рис. 3.2), запишем уравнение динамики разомкнутой и замкнутой систем автоматического регулирования в общем виде В написании передаточной функции ЧЭ есть ошибка, поэтому рис. 3.2 приводим с исправлением: вместо записываем .

Рис. 3.1. Функциональная схема регулятора оборотов двигателя ГТД

Рис. 3.2. Структурная схема регулятора оборотов ГТД
Уравнение динамики разомкнутой САУ в общем виде будет иметь вид:

Уравнение динамики замкнутой САУ в общем виде будет иметь вид:

2. С учетом исходных данных, выбранных по таблицам 3.1−3.3, запишем уравнения динамики в виде линейного дифференциального уравнения с известными уравнениями для разомкнутой и замкнутой САУ.
Конечная задача исследования устойчивости любой САУ состоит в получении обобщенного дифференциального уравнения системы, характеризующего протекание в ней динамических процессов. Одним из возможных путей получения такого уравнения САУ является совместное решение системы дифференциальных уравнений типовых звеньев, из которых состоит рассматриваемая система уравнений.
Для разомкнутой.

с учетом подстановок и преобразований.

Дифференциальное уравнение разомкнутой САУ будет иметь вид.

Для замкнутой САУ.

с учетом подстановок и преобразований.

Дифференциальное уравнение замкнутой САУ будет иметь вид.

3. Оценка устойчивости разомкнутой системы с помощью алгебраических критериев Рауса и Гурвица Устойчивой называется такая САУ, которая, будучи, выведенной из состояния равновесия, после устранения внешних воздействий возвращается к исходному состоянию равновесия. Оценить устойчивость САУ можно с помощью специальных критериев устойчивости, которые представляют собой некоторую совокупность алгебраических действий, в результате которых определяются знаки корней характеристического уравнения системы. Примером критерии устойчивости является критерий Рауса — Гурвица. Раус и Гурвиц показали, что САУ, описываемая характеристическим уравнением.

.
будет устойчива, если при Аn>O все «n» определители Гурвица (Дn) будут положительны, т. е.
и т.д.
Произведем оценку по данному критерию устойчивости Составим определитель Гурвица Д Определим все диагностические миноры.
- 1=1,22
- 1,505
- 0,573
Т.о. САУ по критерию РаусаГурвица устойчива, т.к. А3=0,381>0 и все диагональные миноры положительны.
Считается, что САУ теряет свою устойчивость, когда хотя бы один числовой коэффициент будет отрицательным. Найдем критическое значение коэффициента А3, начиная с которого, т. е. при А3> Акр данная САУ теряет свою устойчивость.
А1А2-А3А0=0 — САУ на границе устойчивости.
А3=Акр;
А1А2=АкрА0; Акр =А1А2/А0, Акр = 1,22• 1,55/1=1,866.
Т.о., начиная с А3 1,866 САУ, теряет свою устойчивость.
4. Устойчивость САУ можно, также, оценить с помощью графоаналитического критерия А. В. Михайлова. С этой целью необходимо в характеристическом уравнении системы заменить оператор Р на чисто мнимое выражение.
j, где — угловая частота. Полученный многочлен можно считать вектором, модуль и направление которого будут определяться значением частоты.
F (j)=X ()+jY (),
Где X () — вещественная часть;
jY () мнимая часть.
Для того, чтобы САУ была устойчива, необходимо и достаточно, чтобы вектор F (j) брал начало на положительной вещественной оси X () при =0 в т. А0 и затем монотонно вращался при изменении от 0 до в положительном направлении, т. е. против часовой стрелки, совершая поворот на угол «n» квадранта.
Годограф вектора F (j), т. е. кривая, которую описывает конец вектора называется кривой Михайлова при изменении от 0 до, выходит из точки А0 и обходит последовательно в положительном направлении «n» квадрантов, где n — показатель степени характеристического уравнения системы.
Оценим устойчивость САУ с помощью частотного критерия Михайлова А.В.
Р заменим на j.
F (j)=А3 (j)3+ А2 (j)2 +А1 (j)+ А0
F(j)= 0,381 (j)3+1,55 (j)2 +1,22 (j)+1;
F (j)=X ()+jY () X ()=-1,55 2 +1.
jY ()=j (-0,381 3+1,22).
Зададимся рядом чисел.
X (). | — 0,546. | — 5,184. | — 12,914. | |
jY (). | 0,839. | — 0,608. | — 6,627. |
Мы построили кривую Михайлова на комплексной плоскости, для чего отложили две оси — вещественную X () и мнимую jY ().
Таким образом, САУ устойчива, так как вектор F (j) берет начало при =0 на положительной вещественной оси X () в т. А0= (1;0), далее вращается против часовой стрелки при изменении от 0 до, совершая поворот на 3 квадранта.



Рис. 3.3.
5. Несколько особое место среди критериев устойчивости САУ занимает критерий Найквиста-Михайлова. Этот критерий позволяет судить об устойчивости замкнутой по АФЧХ разомкнутой САУ, которая может быть получена расчетным путем с использованием передаточной функции системы.
При построении АФЧХ разомкнутой АСУ вначале следует по известному дифференциальному уравнению этой системы получить выражение ее передаточной Wсау (Р). Далее необходимо оператор Р заменить на мнимое выражение j.
W (P)=M ()+jN ().
Конец вектора W (Р) при изменении от 0 до будет описывать кривую, которая совпадает с АФЧХ системы. Критерий Найквиста гласит: для того, чтобы АСУ, устойчивая в разомкнутом состоянии, была устойчивой и в замкнутом состоянии, необходимо и достаточно, чтобы годограф вектора АФЧХ W (j) не охватывал точку с координатой (-1;0) на вещественной оси.
Оценим устойчивость замкнутой САУ с помощью критерия Найквиста, причем.
А3 кр=0,5 Акр=0,5• 1,866 = 0,943.

Вместо Р подставим j.

(*).
Домножим уравнение на сопряженный многочлен и после преобразований получим.

Получим вид передаточной функции с учетом разложения на действительную и мнимую часть.
W (P)=M ()+jN (),.
M ()=;

jN ()=.

Зададимся рядом чисел.
Т.о. САУ устойчива, т. к. годограф вектора АФЧХ разомкнутой системы при изменении от 0 до не охватывает точку с координатой (-1;0) на вещественной оси.
Вывод: в завершении выполненного задания можно подвести итог, что рассматриваемая САУ устойчиво работает — о чем свидетельствуют аналитический критерий Рауса-Гурвица, частотные критерии Михайлова А. В. и критерий Найквиста-Михайлова.
w. | 0,1. | 0,2. | 0,3. | 0,4. | 0,5. | 0,6. | 0,7. | 0,8. | 0,9. | 1,1. | 1,2. | 1,3. | ||
M (w). | 0.6042. | 0.6041. | 0.6034. | 0.6016. | 0.5961. | 0.5792. | 0.5284. | 0.3813. | 0.0162. | — 0.5116. | — 0.7190. | — 0.6057. | — 0.4479. | — 0.3269. |
jN (w). | — 0.0743. | — 0.1521. | — 0.2381. | — 0.3390. | — 0.4654. | — 0.6316. | — 0.8411. | — 1.0017. | — 0.8220. | — 0.3621. | — 0.0601. | 0.0602. | 0.0980. |
Построим вектор АФЧХ.
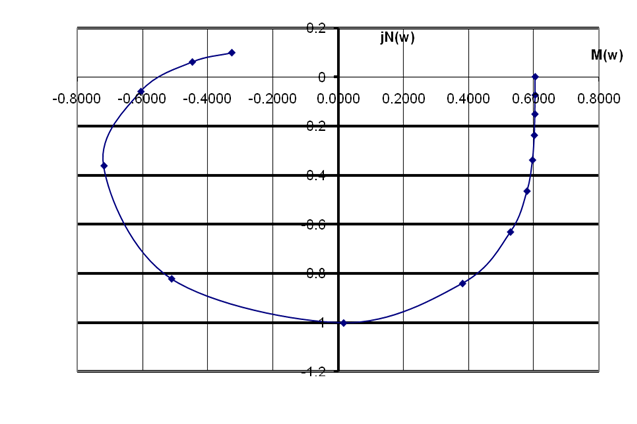
Рис. 3.4.
- 1. В. В. Никонов. Основы автоматики. Пособие по выполнению контрольной работы.: М.: МГТУ ГА, 2005 г. -32 с.
- 2. Черкасов Б. А. Автоматика и регулирование воздушно-реактивных двигателей. М.: Машиностроение, 1988 г.
- 3. Шевяков А. А. Системы автоматического управления авиационными воздушно-реактивными силовыми установками. М.: Машиностроение. 1992 г.
- 4. Гаевский С. А., Морозов Ф. П., Тихомиров Ю. П. Автоматика авиационных газотурбинных силовых установок. М.: Военное издательство МО СССР, 1980, 248 с.