Онтология пространства.
Гранулярная онтология пространства для когнитивных мобильных роботов
Примитивы пространства также можно задать как места и положения,. Место определяется с помощью границы и некоторого объема (протяженности), формируемого этой границей. Положение определяется путем согласования одного места относительно другого. Соответственно, точка — это такой объект, для которого существенно положение в пространстве, но не очень важны размер и конфигурация. Линия (прямая или… Читать ещё >
Онтология пространства. Гранулярная онтология пространства для когнитивных мобильных роботов (реферат, курсовая, диплом, контрольная)
В последние годы проблемы логического и онтологического моделирования пространства и формализации пространственных отношений привлекают все большее внимание зарубежных специалистов по ИИ. Подтверждением этого может служить недавняя публикация капитального «Руководства по пространственным логикам» [HSL, 2007], издание основополагающих работ А. Варзи и Р. Касати [Casati et al., 1999], Л. Вье, Б. Куйперса, Б. Смита и др.
В нашей стране после выхода в свет около 20 лет назад знаменитой монографии [Кандрашина и др., 1989] новые результаты были получены, главным образом, в области представлений знаний о времени (см. работы А. М. Анисова, А. П. Еремеева [Еремеев и др., 2003]). Между тем, проблемы формализации пространственных знаний и рассуждений остаются недостаточно разработанными. Поэтому ниже дано подробное описание основных этапов построения модели пространства (рис.2).
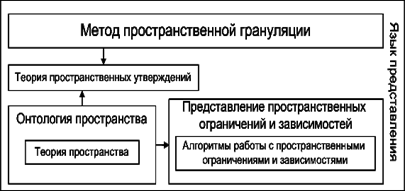
Рис. 2. Общая схема моделирования пространства
Выбор базовой концепции пространства
Рассмотрение пространства как общей онтологической категории следует начинать с выбора базовой концепции пространства. Основные модели пространства можно разделить на абсолютные и относительные, общие и локальные, явные и неявные.
В качестве двух классических концепций пространства можно указать теорию Ньютона и модель Лейбница. Из таблицы 1 видно, что свойства пространства по Ньютону и свойства реального пространства, в котором действует мобильный когнитивный робот, фактически прямо противоположны. Поэтому за основу построения онтологии пространства взята базовая концепция Лейбница.
В отличие от теории «пустого» пространства Ньютона, Лейбниц предложил реляционную концепцию пространства, согласно которой пространство связывается с порядком взаимного расположения и сосуществования в нем различных тел. По Лейбницу, пространство представляется неявно, через отношения между объектами. Обычно в нем определяют некоторую метрику или топологию, чтобы оценивать размеры объектов и расстояния между ними.
Таблица 1. Сравнительный анализ свойств абсолютного пространства по Ньютону и локального пространства робота.
Свойства пространства по Ньютону. | Свойства реального «рабочего пространства» для когнитивного мобильного робота. | |
Бесконечность. | Конечность. | |
Непрерывность. | Дискретность. | |
Однородность. | Неоднородность. | |
Изотропность. | Неизотропность. | |
Неподвижность. | Подвижность, шкалированность. | |
Построение онтологии пространства предполагает определение множества пространственных примитивов, множества базовых пространственных отношений, задание структуры пространства — области интерпретации пространственных примитивов и ее свойств в виде аксиом теории пространства, исходя из требований предметной области (в данном случае, когнитивной робототехники).
Поскольку, по Лейбницу реальное физическое пространство интерпретируют как множество объектов, в качестве пространственных примитивов можно использовать точки или области пространства.
Примитивы пространства также можно задать как места и положения [Casati et al., 1999], [HSL, 2007]. Место определяется с помощью границы и некоторого объема (протяженности), формируемого этой границей. Положение определяется путем согласования одного места относительно другого. Соответственно, точка — это такой объект, для которого существенно положение в пространстве, но не очень важны размер и конфигурация. Линия (прямая или кривая) в пространстве описывает движение объекта.
В общем случае, базовые отношения между пространственными примитивами могут быть как количественными (метрическими), так и качественными (топологическими). Пример количественного отношения — «транспортный робот находится в 20 м от склада», а качественного — «робот находится внутри опасной зоны». Примитивные отношения в пространстве и их логические комбинации можно рассматривать как ограничения, например, «робот а находится недалеко и справа от b».
При построении онтологий для роботов следует учитывать не только общие отношения, но и отношения, отражающие специфику предметной области. В частности, для когнитивных мобильных роботов, это — относительные: расстояния («дальше-ближе», «рядом»); положения («справа-слева», «спереди-сзади», «сбоку»); относительные направления движения («вдоль-поперек»), относительные скорости движения («быстрее — медленнее»). Сводка базовых пространственных отношений для мобильного когнитивного робота и их свойств дана в таблице 2.
Табл. 2. Базовые пространственные отношения (названия и свойства: Р-рефлексивность; С-симметричность; Т-транзитивность, АР-антирефлексивность, АС-антисимметричность).
Обозначение отношений. | Название отношений. | ||||||
Р. | С. | Т. | АР. | АС. | |||
R1 — быть дальше. | Строгий порядок. | ||||||
R2 — быть ближе. | Строгий порядок. | ||||||
R3 — быть равноудаленным. | |||||||
R4 — быть рядом. | |||||||
R5 — быть спереди (напротив). | Строгий квазипорядок. | ||||||
R6 — быть сзади. | Строгий квазипорядок. | ||||||
R7 — быть сбоку. | Строгий квазипорядок. | ||||||
R8 — быть правее. | Строгий квазипорядок. | ||||||
R9 — быть левее. | Строгий квазипорядок. | ||||||
R10 — быть больше. | Строгий порядок. | ||||||
R11 — быть меньше. | Строгий порядок. | ||||||
R12 — быть равным. | Тождество. | ||||||
R13 — быть внутри. | Строгий порядок. | ||||||
R14 — быть вне. | Строгий порядок. | ||||||
R15 — быть перед. | Строгий квазипорядок. | ||||||
R16 — быть за. | Строгий квазипорядок. | ||||||
R17 — соприкасаться. | |||||||
Таким образом, в зависимости от выбора пространственных примитивов имеем два типа моделей пространственных объектов:
- — точечные, сингулярные модели, где пространственные объекты мыслятся (явно или неявно) как множества точек;
- — приближенные, гранулярные модели, например, модели, связанные с интервалами и отношениями между ними.