Концепция модели управления и структурная схема автоматизированной системы управления технологическим процессом авиационных работ
В модуле ввода данных происходит: загрузка карты, ручной ввод координат (подразумевается ввод координат с помощью манипулятора типа «мышь») или загрузка координат вершин поля из заранее созданного файла. После загрузки координат поля необходимо выбрать тип воздушного судна, технологические параметры проводимых работ, критерии и ограничения. При этом имеется возможность необходимую информацию… Читать ещё >
Концепция модели управления и структурная схема автоматизированной системы управления технологическим процессом авиационных работ (реферат, курсовая, диплом, контрольная)
Концепция модели управления и структурная схема автоматизированной системы управления технологическим процессом авиационных работ по территориальному распределению активных веществ
Целевой функцией системы управления технологическим процессом авиационных работ является определение эффективной траектории движения воздушного судна и её выдерживание.
Представленная на рисунке 1 функциональная схема модели управления технологическим процессом авиационных работ ориентирована на использование двухмерной оцифрованной карты, поэтому данные, поступающие от датчика высоты — высотомера, отнесены к информации о возмущениях.
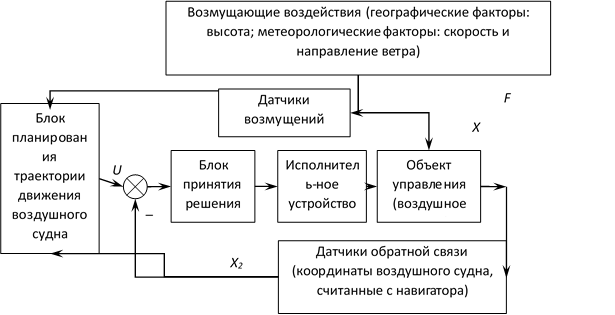
Рисунок 1 — Функциональная схема модели управления технологическим процессом АРРВ.
При использовании оцифрованной карты, полученной на основе трёхмерной модели подстилающей поверхности, необходимо данные о высоте передавать по цепи обратной связи на сравнивающее устройство наряду с координатами.
Информация об отклонениях, превышающие допустимые, через датчики обратной связи в виде координат воздушного судна, считанных с навигатора (X), поступает на сравнивающее устройство параллельно с данными о заданной траектории движения. При наличии значительных отклонениях сравнивающее и исполнительное устройства формируют управляющее воздействие (Q) на бортовой компьютер воздушного судна для корректировки курса.
Наряду с данными о координатах воздушного судна (X2), поступающих по цепи обратной связи, на систему управления воздействуют возмущения, представленные информацией с датчиков о возмущениях (F), включающих: географические факторы — высоту; метеорологические факторы — скорость и направление ветра. Информация о возмущающих воздействиях через специальные датчики поступает в блок планирования траектории движения воздушного судна. Также в этот блок поступает информация о текущих координатах воздушного судна и далее происходит новый расчёт траектории движения воздушного судна.
На основании модели управлении была разработана структура автоматизированной системы управления технологическим процессом (АСУТП) авиационных работ по территориальному распределению активных веществ. Общая схема данной АСУТП представлена в соответствии с рисунком 2, которая включает в себя модуль ввода и вывода данных, блок планирования траектории движения воздушного судна, базы данных.
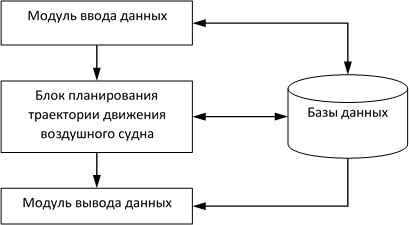
Рисунок 2 — Структура АСУТП авиационных работ по территориальному распределению активных веществ.
Модуль ввода данных считывает входную информацию и направляет её либо в блок планирования траектории движения воздушного судна, либо в базу данных. Основной блок АСУТП — блок планирования траектории движения, где происходят все расчёты технологического процесса. По окончании расчётов за вывод информации отвечает модуль вывода данных.
Рассмотрим структуру и схему заполнения баз данных (рисунок 3). Вначале необходимо ввести в АСУТП карты местности с имеющимися сельскохозяйственным участками. Если эти карты обычные бумажные, то их необходимо оцифровать с помощью сканера, т. е. перевести в электронный вид, при этом карты будут иметь растровый формат. Цифровые растровые версии карт местности сохраняются в соответствующей базе данных и в дальнейшем система будет считывать данные оттуда.
Следующий шаг схемы заполнения данных — это перевод растровых версий карт местности в векторные карты. Это осуществляется указанием вершин сельскохозяйственных участков, при этом система автоматически переводит их в географические координаты с последующим занесением их в соответствующую базу данных.
Рисунок 3 — Структура и схема заполнения баз данных
Отметим, что первоначальная оцифровка карт местности и перевод их в векторные карты является самой трудоёмкой операцией при подготовке к работе АСУТП. воздушный автоматизированный управление Информация о воздушных судах и их лётно-технических характеристиках вводятся в соответствующую базу данных. В зависимости от типа воздушного судна имеется возможность использовать для расчётов сельскохозяйственные самолёты (СХС) и сельскохозяйственные вертолёты (СХВ).
Информация об активных веществах вводятся в соответствующую базу данных. Активные вещества могут быть твердыми или жидкими, или являться живыми микроорганизмами.
Бумажные варианты печатных форм переводятся в электронный вид с помощью среды FastReport и также записываются в базу данных.
Данные о технологии выполнения авиаработ вводятся в базу данных без каких-либо промежуточных преобразований.
Рассмотрим структурно-функциональную схему работы АСУТП авиационных работ по территориальному распределению активных веществ (рисунок 4.).
В модуле ввода данных происходит: загрузка карты, ручной ввод координат (подразумевается ввод координат с помощью манипулятора типа «мышь») или загрузка координат вершин поля из заранее созданного файла. После загрузки координат поля необходимо выбрать тип воздушного судна, технологические параметры проводимых работ, критерии и ограничения. При этом имеется возможность необходимую информацию загружать из базы данных.
Введённые данные поступают в блок планирования траектории движения воздушного судна. Здесь происходит расчёт траектории движения по специальному алгоритму и с учётом данной траектории выполняется расчёт параметров технологического процесса в следующем блоке.
После определения оптимальных параметров система выдаёт конкретные технологические рекомендации для предстоящих авиаработ.

Рисунок 4 — Структурно-функциональная схема работы АСУТП АРРВ.
Для вывода траектории движения воздушного судна в графическом виде служит следующий блок формирования траектории. Траектория включает в себя следующие участки:
- — производственный полёт воздушного судна над полем (идёт непосредственно распределение веществ и биологических объектов);
- — непроизводственный полёт воздушного судна (это перелёты от взлётно-посадочной полосы и обратно, перелёты естественных препятствий, т. е. все участки траектории, где не происходит распределение веществ и биологических объектов, кроме разворотов воздушного судна для повторного захода на очередной гон);
- — развороты воздушного судна для повторного захода на очередной гон;
АСУТП АРРВ должна удовлетворять следующим требованиям:
- — возможность загрузки цифровой версии географической карты реального района с расположенными на ней участками сельскохозяйственных угодий с возможностью точного построения контура поля;
- — высокая точность построения контура с возможностью масштабирования карты;
- — получение выходных данных на каждом шаге расчёта с возможностью вывода на печать;
- — экспорт результатов в различные форматы (Microsoft Word, Microsoft Excel);
- — построение графиков по результатам вычислений;
- — графическая интерпретация траектории перемещения, учитывающая стандартный разворот воздушного судна;
- — конкретные рекомендации для пилотов воздушного судов.
Таким образом, на основе принципа управления по возмущающему воздействию и по отклонению разработана концепция модели управления и структурная схема автоматизированной системы управления технологическим процессом авиационных работ по территориальному распределению активных веществ.