Особенности работы основных узлов
В зависимости от конфигурации обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Перемещение заготовки по осям будет осуществляться при помощи двух шаговых двигателей. Третий шаговый двигатель управляет перемещением рабочего инструмента (сверло… Читать ещё >
Особенности работы основных узлов (реферат, курсовая, диплом, контрольная)
Выбор типа координатных приводов
Наиболее распространёнными электроприводами являются: привод с двигателем постоянного тока и с шаговым двигателем.
Мы выбираем привод с шаговым двигателем. В качестве винтовых приводов были выбраны каретки от принтеров СМ6555 с червячной передачей. Длинна винта в этих каретках, равна (254мм ± 0.01мм). Шаг резьбы равен 25,4(мм). Один машинный шаг по осям X, Y и Z составляет (0.0635 мм).
Рабочее поле координатного устройства выбираем 300×300мм., что составляет формат листа А4.
Перемещение заготовки по осям будет осуществляться при помощи двух шаговых двигателей. Третий шаговый двигатель управляет перемещением рабочего инструмента (сверло, фреза, маркер). Структурная схема привода изображена на рисунке 2.

Рисунок 2 Структурная схема привода 3х координатного устройства.
В зависимости от конфигурации обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером.
Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием.
Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рисунок 2.1).

Рисунок 2.1 Биполярный двигатель.
Униполярный двигатель, также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.
При этом существенно упрощается схема драйвера.
Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рисунок 2.2).

Рисунок 2.2 Униполярный двигатель.
Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рисунок 2.3).
При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный.
Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Для разработки 3* координатного устройства экспериментальным путём был выбран шаговый двигатель НВ4218АС от матричного принтера GP, срок службы таких двигателей обычно обусловлен сроком службы подшипников. Параметры шагового двигателя НВ4218АС приведены в таблице 2:
Таблица 2 — Основные параметры шагового двигателя НВ4218АС.
Напряжение питания В. | 3,7. | |
Ток обмотки. | ||
А. | ||
Сопротивление обмотки Ом. | 6,2. | |
Индуктивность обмотки тГн. | 2,3. | |
Угол шага. | 1,8. | |
град. °±5%. | ||
Число фаз. | ||
кол-во. | ||
Г абариты. | 42×42×32. | |
мм. | ||
Выбранный НВ4218АС шаговый двигатель (рисунок 2.4), имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод.
6 LEADS.
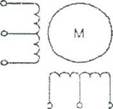
Рисунок. 2.4 Расположения обмоток в шаговом двигателе НВ4218АС.
Существуют три основных типа шаговых двигателей:
- • двигатели с переменным магнитным сопротивлением
- • двигатели с постоянными магнитами
- • гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, однако они обеспечивают меньшую величину шага, больший момент и большую скорость.
На наш взгляд гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Ротор гибридного двигателя НВ4218АС имеет зубцы, расположенные в осевом направлении (рисунок 2.5).

Число шагов при полношаговом режиме работы на оборот для данного типа двигателя составляет 200 шагов (угол шага 1.8 град.).
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Статор гибридного НВ4218АС двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда одна часть зубцов ротора находится строго напротив зубцов статора, а другая часть между ними.
В разрабатываемом устройстве предполагается работа шагового двигателя в полушаговом режиме, то есть управление фазами шагового двигателя.
Полушаговый режим — комбинация, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет избавиться от явления резонанса.
Полу шаговый режим (рисунок 2.6) обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
фА D/tc. ы * ь МшУ. *s. | D Г./&С. is | СА. D Z' ''S С *{|s «ш> `св. | Ji. 0,ф с, н&. " ~Жв | Чг IB | Ф " т | QA. 0 L с. «HIN ¦ Sirfe. !v^y. 0 в | ±А ! о с не. 'О-/ j 4В j. | ||
Я I. | |||||||||
Б ! | " Т. | ||||||||
С J D I. | l. | ||||||||
Рис. 2.6 Полушаговый режим.