Применение обводного тракта в системах стабилизации
Известно, что основным препятствием к расширению полосы системы стабилизации или управления по замкнутому контуру является ограниченная полоса объекта управления. Слишком резкое затухание амплитудно-частотной характеристики (а.ч.х.) объекта в высокочастотной области теоретически можно частично компенсировать применением дифференцирующего устройства в регуляторе. На практике применение… Читать ещё >
Применение обводного тракта в системах стабилизации (реферат, курсовая, диплом, контрольная)
Структурная схема обводного тракта
Возможности увеличения точности и быстродействия систем с обратной связью часто ограничены узкой полосой пропускания управляемого объекта. В высокочастотной области затухание частотной характеристики объекта может оказаться слишком резкой, настолько, что это будет препятствовать обеспечению широкой полосы управления с обратной связью. Даже дифференцирующая обратная связь иногда оказывается недостаточной, вследствие слишком высокого порядка объекта или слишком большого уровня шумов. В статье предлагается проверенный моделированием новый метод корректирования высокочастотных свойств объекта посредством обводного канала. Этот метод позволяет расширить полосу обратной связи, что обеспечивает более глубокое подавление возмущений и более точное управление.
Известно, что основным препятствием к расширению полосы системы стабилизации или управления по замкнутому контуру является ограниченная полоса объекта управления. Слишком резкое затухание амплитудно-частотной характеристики (а.ч.х.) объекта в высокочастотной области теоретически можно частично компенсировать применением дифференцирующего устройства в регуляторе. На практике применение дифференцирующих устройств зачастую невозможно вследствие больших шумов в сигнале датчика, используемого для измерения стабилизируемой или управляемой величины. Но даже если дифференцирование допустимо, эта мера недостаточна в том случае, если затухание а.ч.х. объекта происходит слишком резко. Поскольку даже идеальный дифференцирующий усилитель выправляет наклон логарифмической а.ч.х. не более, чем на +20 дБ / дек, то при исходном наклоне а.ч.х. объекта минус 60 дБ / дек и круче дифференцирование будет недостаточной мерой для достижения устойчивости. Поэтому дальнейшее расширение полосы пропускания системы только за счет дифференцирования невозможно. Но это достижимо с нашим новым методом.
На рис. 6.1 показана традиционная структурная схема системы стабилизации и управления. Пусть объект имеет ограниченную полосу пропускания, и это ограничение препятствует расширению полосы отработки системы. Это определенно ограничивает рост а.ч.х. системы в низкочастотной области также. Мы предлагаем использование дополнительного обводного ВЧ канала, как показано на рис. 6.2. Тогда результирующая а.ч.х. станет достаточно широкополосной, чтобы обеспечить устойчивость и требуемое качество переходных процессов. В то же время относительно малый коэффициент усиления обводного канала предотвратит его заметное влияние на общую структуру в низкочастотной области. Следовательно, низкочастотные свойства системы будут практически такими же, как если бы результирующий композитный объект был изначально широкополосным.
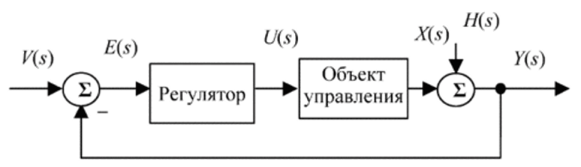
Рис. 6.1. Традиционная структура системы.
Переменные на рис. 6.1 и 6.2 — это преобразования Лапласа от соответствующих переменных во времени величин: Y (t) — выходная величина; V (t) — входной сигнал; У (1) — предписание; E (t) — ошибка управления; U (t) — управляющий сигнал от регулятора на вход объекта; H (t) — помеха; Z (t) — искусственная величина, составленная из выходной величины Y (t) и выходного сигнала обводного ВЧ канала.
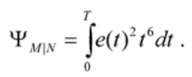
Пример системы для объекта второго порядка дан на рис. 6.3. Возможности регулятора без дифференциатора очень ограничены. Лишь небольшое усиление пропорционального регулятора допустимо. Его значение может быть найдено в программном обеспечении VisSim [1] методом минимизации квадратичного интегрального критерия [2; 3], вычисляемого по следующему соотношению:
Его усиление составляет примерно К = 2,66. Из рис. 6.3 видно, что влияние единичного синусоидального возмущения частотой 0,016 Гц подавлено до остаточной величины с амплитудой около 0,004. Следовательно, коэффициент подавления составляет 250 раз. С обводным каналом, как показано на рис. 6.4, мы получили подавление того же возмущения в 1000 раз, так что остаточная амплитуда составила 0,001. Новый коэффициент подавления в 4 раза выше. Вышеуказанный объект с пропорциональным регулятором, коэффициент которого составляет К = 1000, образует неустойчивую систему, как показано на рис. 6.5. Если обводной ВЧ канал вводится, то система становится устойчивой (результаты показаны на рис. 6.4). Этот пример лишь иллюстративный, и возможности нового метода существенно выше.
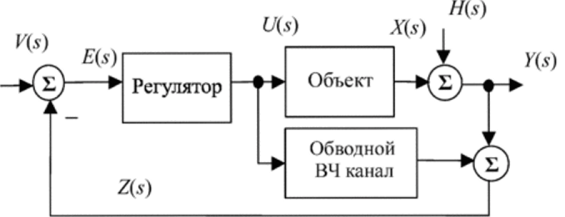
Рис. 6.2. Использование обводного ВЧ-канала.
Известно, что система с объектом, содержащим два интегратора и пропорциональный регулятор, неустойчива всегда. Рис. 6.6 демонстрирует этот случай. Здесь интегральный канал в регуляторе присутствует, но его коэффициент равен нулю. С тем же регулятором и объектом при использовании обводного канала, как показано на рис. 6.7, мы получаем стабильную систему, в которой вышеуказанное возмущение подавляется на 80 дБ (в 10 000 раз). При этом не использовано никакого дифференцирования.
Во всех рассмотренных случаях показаны графики интересуемой нас выходной величины Y (t)y а не искусственно получаемой виртуальной величины Z (t). Для этой (последней) величины переходные процессы более близки к идеальным. Но, несомненно, только процессы реальной величины действительно представляют интерес. Моделирование демонстрирует эффективность нового метода именно для величины, представляющей непосредственный интерес. Более показательные примеры также будут даны впоследствии. Принимая во внимание новизну излагаемого метода, дискуссия в статье ограничена лишь основными идеями метода и двумя иллюстративными примерами.
Таким образом, новый метод обеспечивает расширение полосы отработки системы без применения дифференцирования. Наш метод не запрещает дифференцирования, и оно также может быть использовано.
Но мы показали, что даже без дифференцирования мы можем повысить устойчивость системы и обеспечить требуемое качество даже для объекта второго порядка с двумя интеграторами и даже только с помощью пропорционального регулятора.
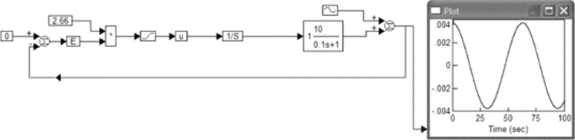
Рис. 6.3. Пример системы для объекта второго порядка.
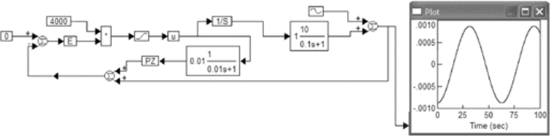
Рис. 6.4. Пример использования высокочастотного обводного канала.
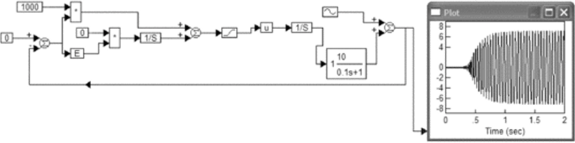
Рис. 6.5. Результаты моделирования предыдущей системы с большим коэффициентом в регуляторе.
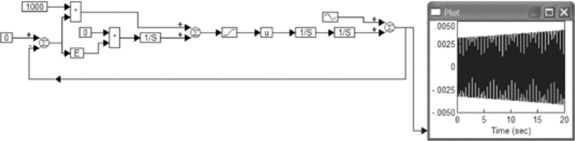
Рис. 6.6. Пример системы для объекта, содержащего два интегратора.
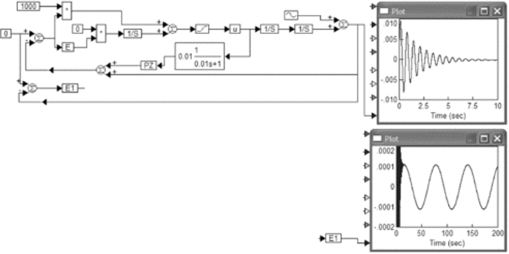
Рис. 6.7. Результаты моделирования предыдущей схемы с применением обводного ВЧ канала.
Пример и регулятор специально выбраны простые, чтобы продемонстрировать возможности метода.