Когнитивное управление.
Интеллектуальные системы и технологии
ГР отличаются от традиционных мобильных роботов большим числом (более 25) связанных степеней подвижности, которыми необходимо управлять координированно для выполнения походки на двух ногах и манипуляций двумя руками. Перспективным направлением для ГР является разработка системы управления с когнитивными агентами. Такая многоагентная когнитивная система по сравнению с традиционными системами… Читать ещё >
Когнитивное управление. Интеллектуальные системы и технологии (реферат, курсовая, диплом, контрольная)
В настоящее время когнитивный подход используется при организации управления такими динамическими объектами со сложным поведением, как гуманоидные роботы (ГР) [5,8]. Создание эффективных систем управления для таких роботов сейчас является одним из самых актуальных направлений в связи с бурным развитием работ в области человекоподобных роботов.
ГР отличаются от традиционных мобильных роботов большим числом (более 25) связанных степеней подвижности, которыми необходимо управлять координированно для выполнения походки на двух ногах и манипуляций двумя руками. Перспективным направлением для ГР является разработка системы управления с когнитивными агентами. Такая многоагентная когнитивная система по сравнению с традиционными системами интеллектуального управления роботами по основным функциям близка к нервной системе человека и, в принципе, должна обеспечить подобное человеческому поведение ГР.
Структура системы управления ГР, основанной на когнитивном подходе, многоагентной технологии и средствах самоорганизации системы, представлена на рис. 23.1.
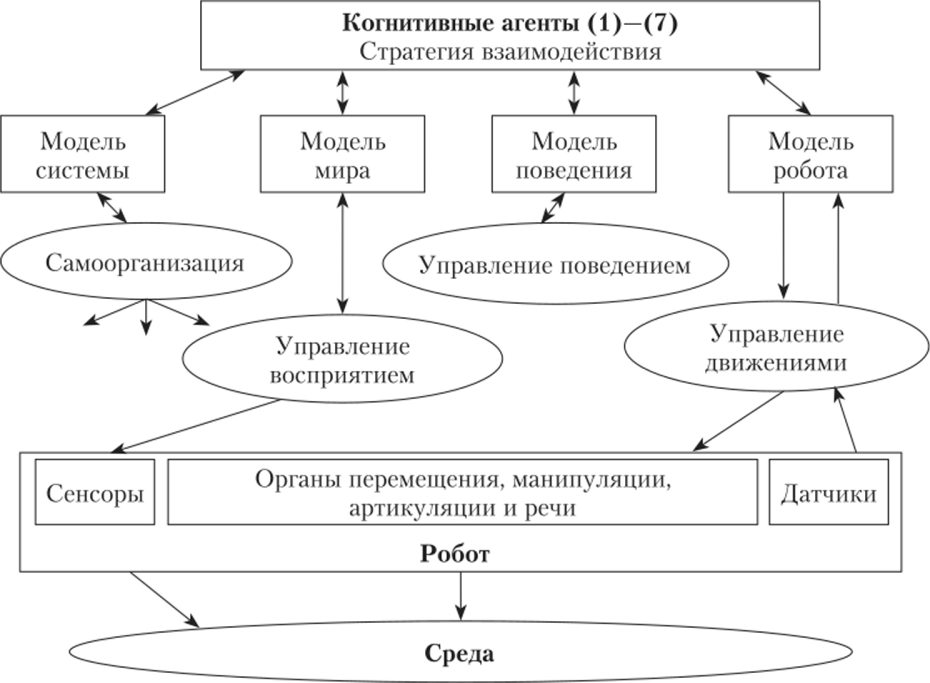
Рис. 23.1. Многоагентная когнитивная система гуманоидного робота.
В соответствии с когнитивным подходом и многоагентной технологией такая система может быть реализована в виде коллектива из М когнитивных агентов, взаимодействующих по принципам кооперации или конкуренции. Такие агенты являются автономными когнитивными системами и имеют свои роли в коллективе агентов. Объединения агентов с разными ролями создают формации.
Многоагентная технология позволяет реализовать восприятие информации и управление поведением робота с помощью внутренних (виртуальных) агентов и набора ресурсов, которые могут использоваться каждым агентом. При этом каждый из когнитивных агентов обеспечивает свое поведение, а их совместная работа позволяет реализовать поведение робота в различных текущих ситуациях. Набор ресурсов включает сенсорные и исполнительские подсистемы робота, средства самоорганизации и управления восприятием, поведением и их исполнением, а также ряд моделей, с которыми работают агенты.
Используя такой подход, можно выделить следующие внутренние (виртуальные) агенты системы.
- • агент «Слышу — Говорю», реализующий акустическое взаимодействие с объектами среды (акустическое восприятие и голосовое общение с людьми или другими роботами);
- • агент «Вижу — Слышу — Говорю», реализующий зрительно-акустическое взаимодействие с объектами среды (зрительное и акустическое восприятие и общение);
- • агент «Вижу — Перемещаюсь», реализующий зрительное восприятие и целенаправленные перемещения среди объектов среды;
- • агент «Вижу — Манипулирую», реализующий зрительное восприятие и целенаправленные манипуляции объектами среды;
- • агент «Слышу — Вижу — Координирую», реализующий зрительноакустическое восприятие и координированное поведение при работе в группе роботов;
- • агент «Безопасно — Контактирую», реализующий контроль безопасности и коррекции действий в опасных ситуациях при взаимодействии с людьми;
- • агент «Слышу — Вижу — Учусь», реализующий зрительно-акустическое восприятие и обучение поведению в разных режимах.
Средства самоорганизации включают Модель системы и компонент Самоорганизация, который обеспечивает автоматическое конфигурирование и настройку всей системы на решение задач управления конкретным вариантом робота.
Модель системы определяется при проектировании и конкретизируется иод цели системы. Она должна содержать накопленную ко времени создания системы генетическую информацию о конфигурации системы, среде, поведенческих функциях и процессах, которые она должна реализовать. Эта информация используется в процессе самоорганизации всей системы (самосборки, самообучения и пр.) средствами компонента Самоорганизация.
Компонент Самоорганизация содержит специальные средства коррекции Модели системы для реконфигурации системы под новые цели, средства построения и коррекции Модели мира для настройки на среду, Модели поведения для настройки поведенческих функций и процессов, Модели робота для настройки актуаторных функций и процессов исполнения действий робота.
Модель мира образуется при начальном взаимодействии робота с объектами среды. Она содержит текущую и прогнозируемую статическую и динамическую информацию о самом роботе, объектах среды и их отношениях. Такая информация в интегрированной форме получается в результате слияния и обработки многомодальной сенсорной информации системами компонента Управление восприятием. Интегрированная информация используется внутренними агентами системы в процессе выбора и реализации компонент поведения робота в текущей ситуации с прогнозированием последствий их реализации.
Модель поведения образуется при взаимодействиях робота с объектами среды в процессе целенаправленных действий. Она содержит набор поведений и отношений для их выбора в текущей ситуации. Эта информация используется внутренними агентами системы для организации индивидуального и коллективного поведения робота. Модель поведения используется также системами компонента Управление Поведением, которые исполняют поведения.
Модель робота образуется при начальном взаимодействии системы и «тела» робота. Система должна иметь изначально представление о теле робота, т. е. о его кинематике, динамике, датчиках и актуаторах, сенсорах и др. При взаимодействии это представление конкретизируется путем настройки параметров. Эта информация о состоянии робота используется внутренними агентами системы при реализации всех управлений актуаторами робота с прогнозированием последствий их реализации. Модель робота используется системами компонента Управление движениями. На базе этой модели могут быть построены вспомогательные системы, обеспечивающие функционирование всей системы в целом: Система управления энергетикой робота, вырабатывающая действия по защите от перегрузок и подпитке источников энергии, и Иммунная система, защищающая программы системы управления от поражения вирусами, которые могут проникнуть через внешние каналы связи.
Рассмотренные в гл. 10 когнитивные концепции, когнитивные структуры, архитектуры когнитивных агентов и принципы их объединения в многоагентную систему были использованы для разработки программного прототипа многоагентной системы ГР. При этом некоторые поведенческие функции были реализованы на сети нейрологических модулей [5]. Этот прототип прошел тестирование при управлении антропоморфным роботом NAO, который выполнял функции игрока команды в специальной среде футбола роботов.