Схема управления с обратной связью по положению исполнительного механизма
Если рассматривать программное устройство как дискретный фильтр, то при использовании любой формулы приближенного интегрирования дискретная передаточная функция программы Z)(z) имеет полюсы на круге единичного радиуса |z| = l. Такой фильтр находится на границе устойчивости, поэтому любые возмущения, например сбои в вычислительном устройстве УВМ, могут привести к ошибкам, вызывающим значительные… Читать ещё >
Схема управления с обратной связью по положению исполнительного механизма (реферат, курсовая, диплом, контрольная)
Схема управления с обратной связью по положению исполнительного механизма (рис. 4.56) обеспечивает более высокую точность отработки анм. Для общепромышленных ИМ она может быть доведена до 0,5…1,0%.
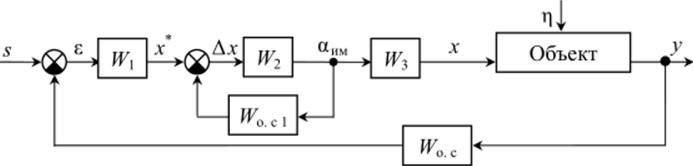
Рис. 4.56. Структурная схема системы НЦУ с обратной связью WQ с по.
положению ИМ
Датчики положения ИМ могут быть цифровые или аналоговые. В системах с цифровыми датчиками управляющее воздействие х* в виде параллельного цифрового кода поступает на регистр-счетчик специального преобразующего устройства, предназначенного для согласования аналогового входа ИМ с цифровым выходом УВМ.
Перейдем к рассмотрению эквивалентной схемы цифровой системы управления с УВМ. Эта схема изображается в виде сложного дискретно-непрерывного фильтра, элементы которого моделируют различные этапы алгоритма переработки информации (рис. 4.57) [15].
В схеме (рис. 4.57) можно выделить три основных устройства, характерных для любого цифрового регулятора.
1. Входное устройство выполняет первичную обработку информации, которая заключается в квантовании непрерывного сигнала (ошибки регулирования) е (/) по времени во входном коммутаторе и по уровню в аналого-цифровом преобразователе и сглаживании цифрового сигнала г*[/Т0] с помощью математического фильтра арифметического устройства. Этап первичной обработки информации завершается запоминанием сглаженного цифрового сигнала в ЗУ. Вся первичная обработка информации осуществляется в информационной части УВМ.
Важнейшими параметрами входного устройства являются период опроса Г0, величина кванта аналого-цифрового преобразователя Д, дискретная передаточная функция сглаживающего фильтра F (z).
2. Вычислительное устройство опрашивает ступенчатый сигнал е (/) с периодом Г, который называют периодом квантования регулятора, и обрабатывает цифровой сигнал? И по программе с дискретной передаточной функцией D (z), Выходной сигнал **[?7'] запоминается фиксатором ЗУ на время Т. Ступенчатый сигнал jc [кТ] является задающей величиной для исполнительного устройства.
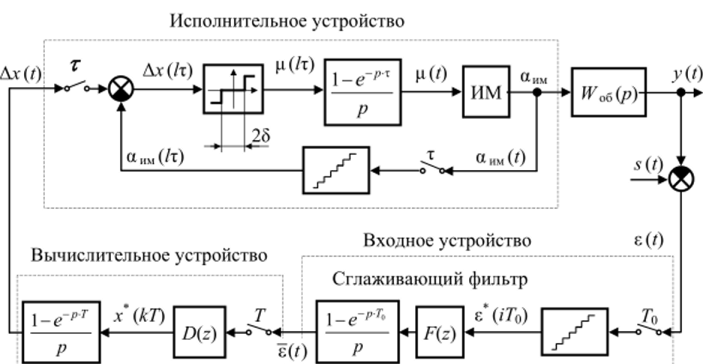
Рис. 4.57. Эквивалентная схема системы цифрового управления
Важнейшими параметрами вычислительного устройства цифрового регулятора являются период квантования Т и передаточная функция программы обработки Z)(z), реализующей в вычислительной части УВМ заданный алгоритм управления.
3. Исполнительное устройство преобразует ступенчатый сигнал х*(7) в соответствующее перемещение анм(/) вала исполнительного механизма ИМ. Оно выполнено в виде следящей цифровой системы, в которой сигнал рассогласования Дх[/т], равный разности между выходным сигналом регулятора .г (/т) и действительным положением регулирующего органа аим[/т], воздействует через реле РУ с зоной нечувствительности 25 и фиксатор на исполнительный механизм ИМ. Так как в рассматриваемой системе используется исполнительный механизм с постоянной скоростью, то сигнал управления р (/) является релейным (трехпозиционным) в виде ступенчатой функции времени, где длительность ступеньки равна т — периоду квантования следящей системы.
Таким образом, управление электрическим ИМ с постоянной скоростью осуществляется через релейные выходы УВМ: при |Ддг|>5 производится включение, при Ах < б — останов. Сторона включения определяется *.
знаком Да;. Величина х рассчитывается УВМ с дискретностью Т « т. Длительность импульса включения ИМ при данном способе управления кратна интервалу опроса обратной связи т (рис. 4.58).
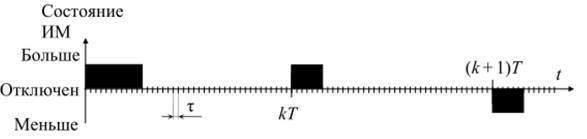
Рис. 4.58. Временная диаграмма управления ИМ с помощью УВМ
Существенными параметрами следящей системы являются период квантования т, зона нечувствительности релейного устройства 26 и скорость исполнительного механизма Vm{. Эти параметры выбираются из тех же условий, что и в системе с ШИМ.
При малых значениях Т и т можно считать, что следящая система практически всегда работает в скользящем режиме, и исполнительное устройство со следящей системой аппроксимируется статическим звеном.
При вычислении задания положения регулирующего органа в вычислительном устройстве используется обычно программа, в которой расчетное приращение положения регулирующего органа Ах* [кТ] суммируется с предыдущим расчетным значением задания х*кТ -Г], т. с. х*[кТ] = Ах*[кТ] + х*[кТ- Г]. Эта программа обеспечивает интегрирование приращения Ах* [кТ] в вычислительном устройстве.
Если рассматривать программное устройство как дискретный фильтр, то при использовании любой формулы приближенного интегрирования дискретная передаточная функция программы Z)(z) имеет полюсы на круге единичного радиуса |z| = l. Такой фильтр находится на границе устойчивости, поэтому любые возмущения, например сбои в вычислительном устройстве УВМ, могут привести к ошибкам, вызывающим значительные возмущения в системе регулирования (вплоть до полного открывания или закрывания регулирующего органа). Чтобы исключить или хотя бы уменьшить влияние сбоев в УВМ на поведение системы регулирования, необходимо использовать аппаратные или программные методы контроля и исправления ошибок при вычислениях. Рассмотренную схему можно отнести к системам с пропорциональным устройством, т. к. интегрирование выполняется в УВМ. Недостатком схемы является также необходимость ввода начальных условий по положению исполнительного механизма при включении регулятора. Программное устройство для ввода начальных условий запускается вручную с пульта управления УВМ в нормальном режиме работы и автоматически в пусковых режимах, когда требуется автоматическое включение регуляторов. Все это усложняет программу регулирования.
Общим недостатком следящей системы является большое количество датчиков и унифицированных преобразователей, а также увеличение аппаратуры собственно УВМ для ввода информации о положении регулирующих органов. Недостатки системы, обусловленные интегрированием в УВМ, можно устранить, применив другую программу для вычисления задания положения регулирующего органа, в котором приращение Дл;*[АТ] суммируется с действительным текущим положением регулирующего органа аим [кТ], т. е. ** [кТ] = Ах* [кТ] + аим [кТ]. В этом случае интегрирование происходит в исполнительном устройстве и полученная схема принципиально мало чем отличается от схемы с ШИМ. Поскольку в вычислительном устройстве определяется лишь приращение величины Ах*[кТ]9 то дискретный фильтр, эквивалентный программному устройству отработки аим, становится структурно устойчивым (все полюсы передаточной функции Dyz) лежат внутри круга единичного радиуса z = 1), и влияние сбоев в расчете на процесс регулирования существенно уменьшается.
Сбой в расчете величины Ах*[кТ 1 может привести в крайних случаях либо к тому, что исполнительный механизм останется в прежнем положении (при ошибочном расчете Дх* [А:Г] = 0), либо к непрерывному перемещению его в течение периода расчета Т (при произвольно большой величине Ах*[кТ]).