Алгоритм траекторного управления [6]
![Реферат: Алгоритм траекторного управления [6]](https://referat.bookap.info/work/7841071/cover.png)
Входными параметрами АТУ являются траекторные параметры ЛА относительно текущей ЛЗП и следующей ЛЗП: S, Z — ортодромические координаты ЛА; Zmax — максимальное допустимое боковое уклонение для использования в законе управления З=kZ Z+kЇ Ї; ФПУ — фактический путевой угол; V — скорость ЛА; H — высота полёта; HЗ — заданная высота полёта; ЗПУi — заданный путевой угол i-й ЛЗП; ЗПУi+1 — заданный путевой… Читать ещё >
Алгоритм траекторного управления [6] (реферат, курсовая, диплом, контрольная)
Оптимальное управление полётом ЛА по маршруту осуществляется с помощью алгоритма траекторного управления (АТУ), который представлен на рис. 2. АТУ реализуется в БЦВМ.
Входными параметрами АТУ являются траекторные параметры ЛА относительно текущей ЛЗП и следующей ЛЗП: S, Z — ортодромические координаты ЛА; Zmax — максимальное допустимое боковое уклонение для использования в законе управления З=kZ Z+kЇ Ї; ФПУ — фактический путевой угол; V — скорость ЛА; H — высота полёта; HЗ — заданная высота полёта; ЗПУi — заданный путевой угол i-й ЛЗП; ЗПУi+1 — заданный путевой угол (i+1)-й ЛЗП.
Выходными функциями АТУ являются: закон управления углом крена З=kZ Z+kЇ Ї и за-кон управления углом тангажа З.
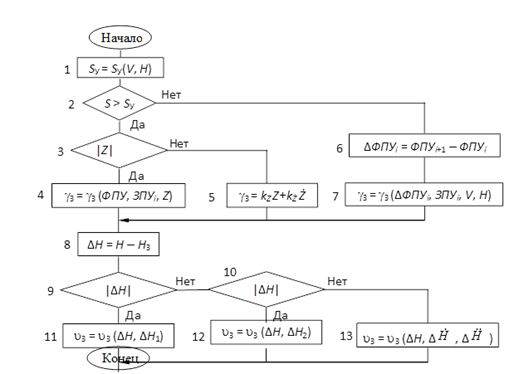
Рис. 2. Блок-схема алгоритма траекторного управления.
Сигналы V и H позволяют рассчитать линейное упреждение разворота Sу (блок 1). При S >Sу АТУ обеспечивает режим стабилизации по боковому отклонению Z от ЛЗП, причём, при больших отклонениях, когда |Z| >Zmax (блок 3), обеспечивается перевод ЛА на траекторию сближения с ЛЗП. Расчёт З при этом осуществляется с учётом параметров ФПУ, ЗПУi и Z, поскольку отпадает необходимость в сигнале Ї для демпфирования боковых колебаний из-за необходимости скорейшего сближения с ЛЗП (блок 4). При |Z| ?Zmax АТУ обеспечивает управление ЛА по закону З=kZ Z+kЇ Ї, при этом устойчивость траекторного управления обеспечивается тем, что кроме отклонения Z используется производная по времени Ї, которая обеспечивает демпфирование боковых колебаний (блок 5).
При S? Sу обеспечивается расчёт З в зависимости от разности заданных путевых углов i-й и (i+1)-й ЛЗП, а также в зависимости от скорости и высоты полёта V и H (блоки 6 и 7).
Управление в продольной плоскости обеспечивается путём стабилизации высоты относительно HЗ. Вычисление З осуществляется в зависимости от отклонений высоты полёта от заданной с помощью трёх различных соотношений (блоки 11, 12, 13). При больших отклонениях высоты ДH от заданной (блоки 9, 10) в закон управления по тангажу входят только позиционные параметры (блоки 11, 12), а при малых отклонениях — также и производные от ДH, что обеспечивает устойчивость процесса стабилизации высоты (блок 13).