Статический расчет экскаватора

Удерживающий момент Му (кН*м) образуется от равнодействующей G1 (кН) весов всех вращающихся частей экскаватора (за исключением противовеса и рабочего оборудования) на плече относительно оси вращения платформы. В противоположном направлении на платформу экскаватора действует опрокидывающий момент Мо (кН*м) от веса рабочего оборудования с грузом, выдвинутым на максимальный вылет. Драглайн. Масса… Читать ещё >
Статический расчет экскаватора (реферат, курсовая, диплом, контрольная)
Для расчета принят экскаватор ЭШ-11/70.
Техническая характеристика карьерного экскаватора ЭШ-11/70 приведена в табл. 2.
Таблица 2. Техническая характеристика ЭШ-11/70.
Показатели. | ЭШ-11/70. |
Вместимость ковша, м3: | |
Угол наклона стрелы, градус. | |
Длина стрелы А, м. | |
Ширина кузова, м. | |
Высота экскаватора без стрелы Нк, м. | 6,73. |
Скорость передвижения, кмч. | 0,2. |
Мощность сетевого двигателя, кВт. | |
Продолжительность цикла. | 52,5. |
Масса экскаватора с противовесом, т. | |
Категория грунта. | |
Коэффициент разрыхления. | 1,2. |
Статический расчет экскаваторов имеет целью определить: уравновешенность поворотной платформы, устойчивость экскаватора, усилия в роликах и захватывающих устройствах опорно-поворотного круга, опорные реакции и давления на основание (грунт).
Уравновесить поворотную платформу — значит устранить выход результирующей веса платформы с механизмами и рабочим оборудованием за пределы периметра опорного круга при повороте платформы с полной нагрузкой и без нагрузки на рабочем органе.
Удерживающий момент Му (кН*м) образуется от равнодействующей G1 (кН) весов всех вращающихся частей экскаватора (за исключением противовеса и рабочего оборудования) на плече относительно оси вращения платформы. В противоположном направлении на платформу экскаватора действует опрокидывающий момент Мо (кН*м) от веса рабочего оборудования с грузом, выдвинутым на максимальный вылет.
При определении оптимальных размеров рабочего оборудования, например драглайна, основной заданной величиной является вместимость ковша или длина стрелы. Если обе величины изменять нежелательно, то прибегают к изменению диаметра опорной базы (в известных пределах). Таким образом, расчет уравновешенности платформы сводится к задаче, в которой среди принятых и заданных величин имеются такие, которые могут быть изменены.
Платформа считается уравновешенной, если при любых возможных положениях поворотной части с ковшом (порожним или груженым) соблюдаются следующие необходимые условия:
- * равнодействующая весов вращающихся частей с рабочим оборудованием не должна выходить за периметр многоугольника, образованного соединением точек касания опорных катков с поворотным кругом;
- * перемещения равнодействующей вперед или назад по отношению к центральной цапфе желательно иметь одинаковыми по величине.
Уравновешивание поворотной платформы достигается соответствующим размещением всех механизмов на поворотной платформе и выбором массы противовеса.
Масса противовеса определяется для двух расчетных положений: I — ковш опущен на почву (веса ковша и рукояти не создают момента); II — груженый ковш выдвинут на 2/3 вылета рукояти.
Первое положение соответствует возможности смещения равнодействующей назад и отвечает, например, для рабочего оборудования лопаты, моменту начала копания при ковше, лежащем на земле (см. рис. 3, положение I). При этом подъемный канат ослаблен. Таким образом, веса рукояти Gр (кН) и ковша Gk (кH) исключаются из состава опрокидывающих сил. Масса противовеса mnp1 (т) или его вес Gnp = g*mnp (кН) могут быть определены из уравнения моментов относительно точки А. При условии, что равнодействующая VA весов поворотной части экскаватора (с противовесом и рабочим оборудованием) проходит через точку, А (крайнее допустимое положение равнодействующей внутри круга катания с радиусом Rо получим.
mnp1 = (Mo — My)/(rпр — Rо) *g = [Gc (rc+Rо) — G1(r1 — Ro)]/(rпр — R0) *g,.
где Gc и G1 — веса стрелы и поворотной платформы с механизмами соответственно, кН; rпр, rc, r1 — плечи действия сил (см. рис. 3.1, а).
Второе положение соответствует возможности выхода равнодействующей вперед за точку В. При расчете экскаваторов средней мощности принимают, что груженый ковш выдвинут на 2/3 длины рукояти, а для мощных экскаваторов — на полную ее длину.
Предположим, что равнодействующая VB весов поворотной части экскаватора проходит через точку В. Тогда масса противовеса из уравнения моментов относительно точки В будет.
mпр = [Gc (rс — R0) + Gрrp + Gк+пrк — G1(r1 + Ro)]/(rпp + Rо)*g,.
где rp и rк — плечи действия сил (см. рис. 3.1, а).
При выборе массы противовеса экскаватора с одним видом рабочего оборудования достаточно получить mпр1 = mпр2 и принять величину противовеса такой, чтобы mпр2 < mпр < mпр1.
Если масса противовеса для положения II получается больше, чем для положения I, то это указывает на чрезмерное смещение механизмов на платформе вперед, на слишком длинное и тяжелое рабочее оборудование или на то, что выбранный диаметр поворотного круга мал.
Если mпр2 < 0 < mпр1, то это свидетельствует об излишне легком или коротком рабочем оборудовании. То же самое может быть и при чрезмерно сдвинутых назад механизмах.
Драглайн. Масса противовеса для драглайна, как и для лопаты, определяется для двух расчетных положений: I — ковш опущен на землю, стрела поднята на максимальный угол гmах = 45ч50°, II — ковш с породой поднят к голове стрелы, стрела опущена на минимальный угол гmin = 25ч30°.
Последовательность расчета уравновешенности платформы драглайна такая же, как и для прямой лопаты.
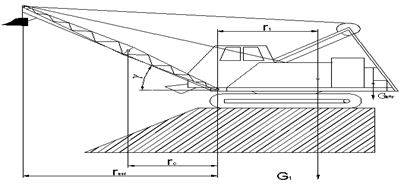
Рис. 3.Схема к определению уравновешенности драглайна
Исходные данные: радиус опорно-поворотного круга Rо = 2,5 м, массы стрелы с напорным механизмом, рукояти, ковша с породой и платформы соответственно mc= 100 т; mк+п= 34,7 т и mпл=180 т, а плечи противовеса и поворотной платформы соответственно равны rс=40 м, rпр=10м, r1=25м.
В соответствие с рис. 3. массу противовеса определяем для двух расчетных положений.
1. Ковш опущен на землю, тогда из уравнения моментов относительно точки, А имеем:
mnp1=[Gc (rc+Rо) — Gпр (r1-Ro)]/g (rпр-Rо) = [mc (rc+Rо) — mпл (r1-Ro)]/(rпр-Rо)= =[100* (40+2,5) — 180(25 — 2,5)]/(10 — 2,5) = 26,6 т Определим точку x1 приложения равнодействующей всех сил G действующих на поворотный круг при массе противовеса.
mnp1 = 0, тогда G = g* (mпл + mc) = 9,8* (180+ 100) = 2746 кН, и из уравнения моментов относительно оси О имеем.
mпл* (r1- x1) = mc* (rc + x1),.
откуда.
x1 = (mплr1 — mcrc)/(mпл + mc) = (180 * 25−100 * 40)/(180 + 100)= 1,7 м влево от оси О и внутри поворотного круга.
Если же расположить противовес mnp1 = 26,6 т на расстоянии rпр = 10 м от оси вращения платформы, то равнодействующая всех сил:
G = g*(mc+ mпл+ mnp1) = 9,81*(100 + 180 + 26,6) = 3007,7 кН, действующих на поворотный круг будет приложена в точке А, однако эта дополнительная нагрузка на поворотный круг будет отрицательно сказываться на общем балансе весов экскаватора.
2. Груженый ковш выдвинут на 2/3 вылета рукояти, тогда из уравнения моментов относительно точки В имеем:
mnp2 = [mc*(rc — Ro) + mк+пrк — mпл•(Ro+1,2r1)]/(rпр — Rо) =.
= [100* (40 — 2,5)+ 34,7 * 66,5−180*(2,5+1,2*25)]/(10−2,5) = (3700+ 2004,1 — 5940)/7,5 = -31,4.
Определим точку x2 приложения равнодействующей всех сил G действующих на поворотный круг при массе противовеса mпр2 = 0, тогда.
G = g (mc + mпл+ mк+п) = 9,81* (100 + 180+ 34,7) = 3087 кН, а из уравнения моментов относительно оси О имеем:
mпл (r1 + x2) = mc (rс — x2) + mр (rр — x2) + mк+п (rк — x2),.
откуда.
x2 = (mcrс + mк+пrк — mплr1)/(mc + mпл + mк+п) =.
= (100*40 + 34,7 * 66,5 -180 * 25)/(100 +180 + 34,7)= 5,09 м вправо от оси и внутри поворотного круга.
Равнодействующая всех сил действующих на поворотный круг будет приложена в точке В только если масса противовеса будет отрицательной величиной, что не имеет физического смысла.
Данный экскаватор имеет удовлетворительно уравновешенную платформу. В расчетных случаях равнодействующая всех сил не выходит за пределы периметра опорно-поворотного круга, что не требует установки балластного груза.
платформа экскаватор драглайн карьерный.