Интерпретация распределенных вычислений
В качестве основного метода описания поведения сложных технических объектов традиционно используется шаблон проектирования, называемый конечным автоматом — FSM (Finite state machine). FSM — алгоритм поведения технического объекта, который характеризуется наличием множества состояний, условных переходов между состояниями в зависимости от входных сигналов. То есть переход между состояниями… Читать ещё >
Интерпретация распределенных вычислений (реферат, курсовая, диплом, контрольная)
В разделе Критерии [Глава 3.
Введение
в распределенные вычисления] было дано определение распределенных вычислений и определены критерии распределенных систем, основная черта которых — коммуникация между компонентами системы.
Теперь необходимо определить понятие распределенных вычислений в рамках моделируемой системы. Согласно данному определению, моделируемой системой является совокупность узлов, окружающей среды, сценария поведения узлов, цели, которую необходимо достигнуть моделируемой системе в процессе своей работы. На данный момент, наиболее важна последняя часть предоставленного определения, поскольку целью работы сети является выполнение вычислительной задачи, или распределенного вычисления, таким образом, чтобы достигнуть минимального значения расхода энергии узлами сети.
Задача, которая возникает в сети в режиме реального времени, может быть разбита на нескольких подзадач разных типов, различных по энергозатратам.
Рассмотрим пример. Моделируемой системой является система управления центральным тепловым пунктом на основе беспроводной сенсорной сети. Контроллеры размещаются в точках учёта (пар, холодная вода, горячая вода) и точках управления (входные и выходные задвижки). Целью работы сети или распределенной задачей является определение является ли температура в помещении комфортной, а также определение степени управляющего воздействия в механизмах подачи тепла.
Цель или вычислительную задачу необходимо разбить на подзадачи:
- 1. Сбор данных с датчиков.
- 2. Анализ данных, которые были собраны с датчиков путем расчета формулы в соответствии с выбранным методом.
- 3. Сравнение результата формулы с априорным значением, характерным для помещения.
- 4. Определение степени управляющего воздействия в точках управления.
- 5. Коммуникация между узлами.
Помимо вычислений самой задачи, необходимо учесть энергетические затраты на коммуникацию между узлами. Поэтому добавлен пункт 5. Коммуникация между узлами, который отражает затраты на передачу данных от датчиков на шаге подзадачи 1, а также передачи управляющего воздействия на шаге подзадачи 4. Подзадачу 1 распределить невозможно, поскольку данные от датчика хранятся на каждом узле. И слишком затратно осуществлять считывание показаний с датчиков соседним узлом сети. Для этого придется воспользоваться механизмом вызова удаленной процедуры, рассмотренным в разделе Удаленный вызов процедур главы 3.
Введение
в распределенные вычисления. Удаленный вызов сложен в реализации и нецелесообразно использовать его для такой легкой задачи.
Подзадачи 2, 3, 4 теоретически возможно распределить между узлами, так как неважно каким из узлов они будут выполнены. Следовательно, распределенные вычисления будут подразумевать под собой передачу по сети данных, необходимых для вычисления, формул, которые необходимо рассчитать, априорных значений, с которыми будет производиться сравнение. при наличии данных, собранных датчиками. Каждая подзадача будет отсылаться узлу, у которого достаточно памяти, зарядка аккумулятора и прочих характеристик, чтобы выполнить подзадачу.
Распределенные вычисления в рамках моделируемой сети имеют следующие характеристики:
- — одна общая задача для всей сети;
- — наличие взаимосвязи между общей задачей и узлами сети;
- — возможность разбиение общей задачи на подзадачи;
- — приоритезация подзадач;
- — различное энергопотребление подзадачами;
- — учет энергопотребления на передачу подзадачи;
- — динамический определяемый алгоритм поведения узлов.
Существуют подзадачи различных типов, характеризующиеся различными энергозатратами, требованиями к памяти узла сети, степенью необходимости выполнения подзадачи (приоритетом), территориальным местоположением (в случае задачи передачи данных):
- — тип 1 «Передача данных «cluster head»;
- — тип 2 «Передача от «cluster head» на сервер;
- — тип 3 «Затратное вычисление»;
- — тип 4 «Стандартное вычисление»;
- — тип 5 «Простое вычисление»
Обоснование метода управления узлом сенсорной сети Метод разрабатывается на основе нейронных сетей, с учетом технологии Заимствования Энергии от окружающей среды, которая, за счет специально встраиваемых модулей для сенсорной сети, позволяет преобразовывать различные типы возобновляемой энергии в электрическую, для подзарядки узлов сети от окружающей среды. Разработанный алгоритм работы сенсорной сети основывается на математическом аппарате раздела теории автоматического управления под названием «Нейронные сети» и дополнен возможностью Заимствования энергии от окружающей среды.
В качестве метода управления поведением узла выбраны нейронные сети. Метод предоставляет следующие преимущества:
- — интеллектуальное управление узлом;
- — возможность самостоятельного обучения сети;
- — выявление неизвестных закономерностей путем обобщения;
- — адаптация под различные входные данные;
- — быстродействие (распараллеливание обработки информации за счет одновременной проверки всех параметров узла: выбор состояния узла производится после 1 проверки параметров, вместо 5 проверок в случае использования протокола LEACH);
- — высокая отказоустойчивость при аппаратной реализации.
В качестве основного метода описания поведения сложных технических объектов традиционно используется шаблон проектирования, называемый конечным автоматом — FSM (Finite state machine). FSM — алгоритм поведения технического объекта, который характеризуется наличием множества состояний, условных переходов между состояниями в зависимости от входных сигналов. То есть переход между состояниями осуществляется, при получении входного сигнала. Глобально, FCM делятся на детерминированные (сколько входных сигналов, столько и переходов) и недетерминированные (на каждый входной сигнал возможен переход в несколько состояний). Существуют, также автоматы Мили, Мура, которые используются, в основном, при проектировании цифровой аппаратуры.
В разрабатываемой модели беспроводной сенсорной сети узел рассматривается, как самостоятельный интеллектуальный объект, который меняет свое состояние в зависимости от изменений параметров самого узла или параметров окружающей среды. На первый взгляд, идеально было бы представить сеть, состоящую из такого типа узлов, в виде конечного автомата. Но для решения поставленной задачи управления переходами межу возможными состояниями узла выбран метод нейронных сетей, то есть другая абстракция описания поведения технического объекта.
Субъективно, метод нейронных сетей полагается более удобным, так как при разработке FCS возможны ошибки, поскольку автоматное проектирование предоставляет разработчику более свободное описание поведения технического объекта, в то время, как решение поставленной задачи с помощью нейронных сетей сводится к задачи классификации произвольного сочетания входных данных в соответствии с набором состояний, аналогичным FCM. Сравнение подходов приведено в таблице 3.
Таблица 3 Сравнение методов FCM и нейронные сети.
Характеристики | Метод конечного автомата. | Метод нейронные сети. |
Форма представления начального состояния. | Вершина графа. | Вектор из значений текущих параметров. |
Форма представления алгоритма. | Граф. | Нейронная сеть (абстракция). |
Суть метода. | Переходы между состояниями осуществляются на основе теории множеств. | Решение задачи классификации по набору состояний на основе математических формул. |
Наличие набора состояний. | Да, в виде вершин графа. | Да, да в виде значений выходного вектора. |
Наличие переходов между состояниями. | Да, в зависимости от прихода нового сигнала. | Да, в зависимости от изменения начальных значений вектора параметров. |
Не смотря на то, что при моделировании поведения узла выбран метод нейронные сети, необходимо рассмотреть оба метода для более точного определения достоинств и недостатков.
В таблице 4 приведены идентификаторы состояний, которые используются в предлагаемом методе.
Таблица 4 Набор возможных состояний узла.
Состояния | Идентификатор (для метода нейронных сетей). |
Receiver. | |
Transmitter. | |
Computer. | |
Scavenger. |
В таблице 5 приведен набор параметров, влияющих на переход между состояниями, которые должны быть учтены при моделировании.
Таблица 5 Набор параметров, влияющих на переход между состояниями.
Описание вектора параметров | Имя параметра. | Диапазон значений. |
Уровень заряда аккумулятора. | Energy. | [-5;5]. |
Приоритет выполнения задачи. | Task_Necessary. | {1,2,3}. |
Тип задачи по энергозатратности (стандартное, затратное, простое). | Task_EnergyNeeds. | {1,2,3}. |
Расстояние до соседнего узла. | Distance_To_Node. | {0,1,2,3,4}. |
Флаг завершения вычислений. | End_Computing. | {0, 1}. |
Флаг завершения передачи. | End_Transmitting. | {0, 1}. |
Флаг появления задачи. | Is_Task. | {0, 1}. |
Флаг появления данных. | Is_Data. | {0, 1}. |
Разработка FCM необходима для более качественного описания метода функционирования узла сенсорной сети с помощью нейронных сетей. У обоих методов есть особенности, которые будут рассмотрены в текущем разделе.
В случае использования FCM, переход из одного состояние в другое происходит по приходу конкретного сигнала, например, уменьшению значения параметра Energy, то есть, когда Energy становится меньше порогового значения. В случае нейронных сетей, смена состояний происходит после оценки всего вектора параметров одновременно. То есть, если наряду с уменьшением энергии, пришла новая задача, требующая срочной передачи или вычисления, узел перейдет п состояние Node_Transmitter, Node_computer, а не Node_Scavenger. Для того, чтобы грамотно описать подобную ситуацию с помощью конечного автомата, требуется использовать недетерминированный автомат, разработка которого гораздо более трудоемка, чем использование метода нейронных сетей. В случае использования нейронных сетей, задача сводится к линейной задаче классификации и субъективно является более легким способом решения поставленной задачи. Но этап разработки конечного автомата необходим для более точного понимания разрабатываемого алгоритма функционирования узла сети.
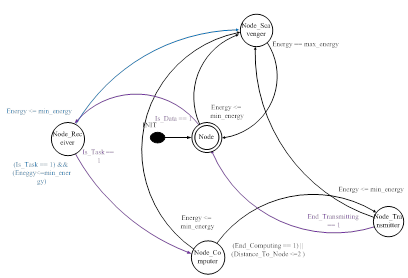
Рисунок 5 — Алгоритм управления узлом сети в форме FCM.