Оценка качества регулирования
Предельные значения. Полученные значения. Размерное время: Цi (t) = hi (x) *Vi (x),. Показатели. Где i = 1,2,3,4. Щp/щn = ч. Хвых (t). Фсумм. Трап. Хст. 93,74. 69,46. 69,46. Фр. T, c. Щp. Щn. Х1. 889. 889. 889. 889. 889. 778. 778. 778. 778. 778. 778. 667. 667. 667. 667. 667. 667. 556. 556. 556. 556. 556. 556. 444. 444. 444. 444. 444. 444. 333. 333. 333. 333. 333. 333. 222. 222. 222. 222. 222. 222. Читать ещё >
Оценка качества регулирования (реферат, курсовая, диплом, контрольная)
По таблице 6 строим вещественно-частотную характеристику замкнутой системы регулирования (рисунок 7).
Будем рассматривать только первые 2 колебания. Вещественно-частотная характеристика (рис.7), разбивается на ряд трапеций. В данном случае их получилось четыре. Характеристики трапеций представлены в таблице 7.
Таблица 7 Характеристики трапеций.
№ трап. | В. | щp. | щn. | щp/щn = ч. |
93,74. | 4,5. | 0,64. | ||
— 93,74. | 4,5. | |||
— 69,46. | 9,5. | 0,48. | ||
— 69,46. | 9,5. | 0,74. |
Построение переходного процесса
График переходного процесса цУ (t) = ц1(t) — ц2(t) — ц3(t) + ц4(t),.
где ц1(t), ц2(t), ц3(t), ц4(t) — составляющие переходного процесса, которые определяются по h-функции для каждой трапеции. h (x) берется из [3, стр. 56−57].
Коэффициент наклона трапеции:
цi (t) = hi (x) *Vi (x),.
где i = 1,2,3,4.
Размерное время:
t = ф/щп По полученным данным строим график составляющих переходного процесса ц1(t), ц2(t), …, ц4(t), которые затем графически складываются (рисунок 9).
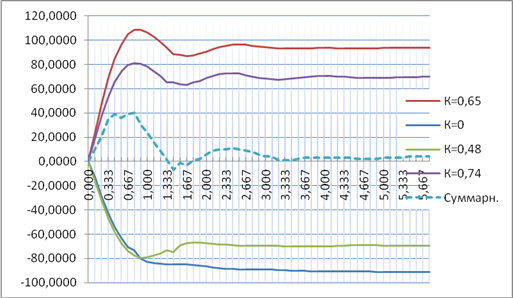
Рисунок 8 Составляющие цi (t) и кривая переходного процесса ц?(t).
Суммарный график ц?(t) характеризует переходный процесс автоматического регулирования при единичном скачкообразном возмущении.
Таблица 8 Данные для построения кривой переходного процесса.
Фсумм. | t, c. | хвых (t). |
0,000. | ||
0,111. | ||
0,222. | ||
0,333. | ||
0,444. | ||
0,556. | ||
0,667. | ||
0,778. | ||
0,889. | ||
1,000. | ||
1,111. | ||
1,222. | ||
1,333. | ||
— 7. | 1,444. | — 28. |
— 1. | 1,556. | — 4. |
— 3. | 1,667. | — 12. |
1,778. | ||
1,889. | ||
2,000. | ||
2,111. | ||
2,222. | ||
2,333. | ||
2,444. | ||
2,556. | ||
2,667. | ||
2,778. | ||
2,889. | ||
3,000. | ||
3,111. | ||
3,222. | ||
3,333. | ||
3,444. | ||
3,556. | ||
3,667. | ||
3,778. | ||
3,889. | ||
4,000. | ||
4,111. | ||
4,222. | ||
4,333. | ||
4,444. | ||
4,556. | ||
4,667. | ||
4,778. | ||
4,889. | ||
5,000. | ||
5,111. | ||
5,222. | ||
5,333. | ||
5,444. | ||
5,556. | ||
5,667. | ||
5,778. | ||
Поскольку величина возмущения на входе системы была равна 4, ординаты суммарной кривой переходного процесса пересчитываем с учетом данной величины.
На рисунке 9 приведена кривая переходного процесса, построенная с учетом величины входного возмущения.
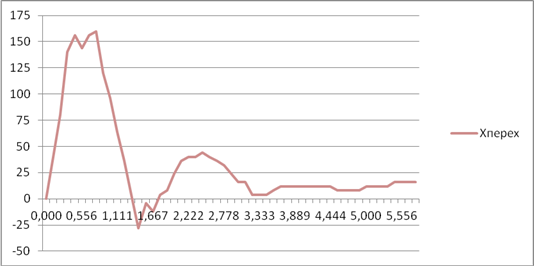
Рисунок 9 Кривая переходного процесса.
Ранее с помощью программ расчета кривой переходного процесса в системе с ПИ-регулятором был построен график переходного процесса, и этот график совпадает с кривой, рассчитанной вручную.
Сравнительная характеристика показателей регулирования С помощью графика переходного процесса (рис. 9) определим.
Х1* - максимальное динамическое отклонение фр* - время регулирования з — степень перерегулирования Таблица 9 Сравнение расчетных и заданных значений.
Показатели. | Х1. | ?Хст. | фр | з. |
Предельные значения. | 3,4. | |||
Полученные значения. | 3,0. | 0,175. |
Вывод: сравнение расчетных и заданных параметров показывает, что система автоматического регулирования удовлетворяет показателям качества.