Граф-модели для определения сходства структур систем с учетом сходства расположения фрагментов
Предложенные модели позволили разработать обобщенный подструктурный подход к анализу сходства структур систем, учитывающий сходство расположения фрагментов. На основе этих моделей стало возможным эффективное решение задачи определения сходства графов с учетом сходства расположения фрагментов методом замены поиска максимальных общих фрагментов для gs_моделей (50−70 вершин) на поиск максимальных… Читать ещё >
Граф-модели для определения сходства структур систем с учетом сходства расположения фрагментов (реферат, курсовая, диплом, контрольная)
Сходство структур систем является ключевым понятием в реализации правдоподобных рассуждений, что определяет актуальность и значимость разработки моделей, методов и программных комплексов для анализа сходства и подобия структурированных нечисловых объектов (графов, мультиграфов, семантических сетей и др.) [Финн, 1991], [Кохов и др., 2004].
g-модели для характеризации сходства расположения фрагментов в графе Пусть M множество графов, Ml множество помеченных графов, F (G)=(F1, F2,…, Ft,…, FT) (Fl(G)={Fl1, Fl2,…, Flt,…, FlT }) — множество всех собственных фрагментов (помеченных фрагментов) графа G = (V, E), а Flt={f1lt, f2lt, …, fjlt, …, frtlt} множество помеченных фрагментов типа t, где j номер фрагмента, rt число фрагментов типа t, T число типов.
Под графом отношений фрагментов (g-моделью) графа G = (V, E) будем понимать двудольный граф с весами на вершинах и рёбрах вида:
GM_sr (G) = wleFlwlL(sr)FlwlR(G) = (VLVR, sr, E, WVL, wL, WVR, wR, WE, we),.
определяемый параметрами sr, BL, BR, EL, ER, где:
- 1. sr — бинарное отношение на множестве Ml, то есть sr (Ml Ml);
- 2. BL — базис левой доли (множество фрагментов левой доли);
- 3. BR — базис правой доли (множество фрагментов правой доли);
- 4. EL — функция, определяющая тип вложения фрагментов из BL в граф G (EL(ft):MG (как фрагмент); EL(ft):MSG (как подграф));
- 5. ER — функция, определяющая тип вложения фрагментов из BR в граф G (ER(ft):MG (как фрагмент); ER(ft):MSG (как подграф));
- 6. VL — множество вершин левой доли (vVL соответствует одному из помеченных фрагментов — канонических вложений элементов из BL в G);
- 7. VR — множество вершин правой доли (vVR соответствует одному из помеченных фрагментов — канонических вложений элементов из BR в G);
- 8. E — множество рёбер: vVL, uVR [{v, u}E wL(v)(sr)wR(u)];
- 9. WVL — множество весов вершин левой доли (WVL Ml);
- 10. wL — функция, сопоставляющая вершинам VL их веса (wL:VLWVL);
- 11. WVR — множество весов вершин правой доли (WVR Ml);
- 12. wR — функция, сопоставляющая вершинам VR их веса (wR:VRWVR);
- 13. WE — множество весов ребер (WE Ml или WE N);
- 14. wE — функция, сопоставляющая веса рёбрам (wE:EWE).
Введем систему обозначения g-моделей [Кохов, 2004]:
[we[l ]]L[wL[l ]](sr)R[wR[l ]] = [w[l ]]L[w[l ]](sr)R[w[l ]],.
где L обозначает множество WVL, R — множество WVR, sr — отношение, определенное на WVLWVR; we — наличие графов-весов ребер g-модели, wL (wR) — наличие графов-весов вершин левой (правой) доли g-модели; l — наличие пометок вершин в графах-весах. При отсутствии некоторых параметров, выделенных скобками [ ], получаются различные виды g-моделей. При совпадении wL и wR доли g-модели «склеиваются» в одну.
Отношение sr определяется типом операции над парой (filt1, fjlt2) и ограничениями на её операнды и результат. В качестве операции выделим операцию определения максимального изоморфного пересечения (МИП), результатом которой является максимальный общий фрагмент (МОФ): mcf (filt1, fjlt2)? filt1fjlt2. Для помеченных фрагментов МОФ определяется однозначно и результатом может быть. Ограничения на операнды (предикат допустимости PO(filt1, fjlt2)) определяют диапазоны возможного изменения соотношений между filt1 и fjlt2. Ограничения на результат (предикат PMCF(filt1fjlt2, filt1, fjlt2)) определяют изменения диапазона параметров МОФ и соотношений между МОФ и исходными фрагментами:
filt1fjlt2 PO(filt1, fjlt2) & PMCF(filt1fjlt2, filt1, fjlt2).
Определение 1. Матрицей M_GM (G) = ||mсfij||, i=1,2,…, k; j=1,2,…, k смежности вершин g-модели wleFlwlLFlwR(G) = wleFlwlFlw (G) называется матрица, для которой mсf lij максимальное по числу вершин изоморфное пересечение filt1fjlt2, если fi lt1fj lt2 и 0, если filmfjln = .
Рассмотрим g-модель weFlwFlw (G), в которой структурный вес we каждого ребра заменим на D1(fi lt1, fj lt2) = |V (fi lt1)| + |V (fjlt2)| 2|V (mсfij)| или D2(fi lt1, fj lt2)=|V (fi lt1)|+|E (filt1)|+|V (fj lt2)|+|E (fj lt2)|2(|V (mcf (fi lt1, fj lt2))|+|E (mcf (fi lt1, fj lt2))|).
В результате построена gs-модель wDFlwFlw (G), характеризующая сходство расположения фрагментов fjl Fl в графе G по D1 или D2.
Если учесть орбиты (Autt(G), fit) группы Autt(G), определяющие симметрию расположения фрагментов типа t в графе G, для t=1, 2,…, T, то выделим новый вид gи gs-моделей, учитывающих число фрагментов в орбите (второй вес вершины (WVN (v)) в g-модели) и характеризующих сходство расположения фрагментов с точностью до орбит групп Autt(G). Обозначим соответственно эти модели как go-модели и gso-модели.
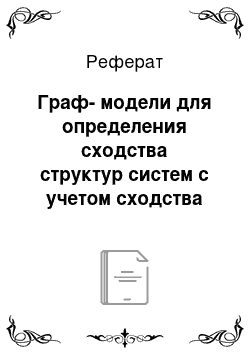
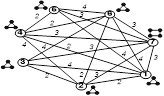
На рис. 1 приведены примеры диаграмм семи моделей. Результаты определения МОФ для подграфов С3 и С4 с учетом расположения их орбит в графе G и расстояния между орбитами приведены в табл. 1−3.
Определим систему стратификации gs-моделей, которая необходима для: (1) обобщения известных отношений подобия, толерантности и эквивалентности графов и выделения новых видов этих отношений; (2) выделения моделей, для которых задачи построения и исследования имеют существенно меньшую вычислительную сложность, чем для gs-модели общего вида; (3) построения на основе gs-моделей иерархической системы структурных и числовых инвариантов с целью систематического исследования их чувствительности при решении задач различения графов (расположения фрагментов в графе), определения сложности и сходства графов с учетом расположения фрагментов.
Предлагаемая система включает четыре разреза стратификации: (1) по виду операндов операции и видам иерархии их рассмотрения, ограничениям на вид и результат операции; (2) По признаку выделения отдельных фрагментов gs-модели; (3) по признаку учета или не учета структурных весов вершин и/или ребер gs-модели и видам структурных весов; (4) по частному виду операции (вложение, изоморфизм).
В качестве параметров первого разреза стратификации выделим:
- 1. Вид операции, определяющей отношение sr=, с учетом видов фрагментов структурных весов вершин gs-модели как частей графа (пересечение общего вида —, пересечение вида подграф-подграф — S).
- 2. Признак связности или несвязности графа, соответствующего весу (wL[l]) левой доли или/и весу правой доли (wR[l]) gs-модели (с, с, сс).
- 3. Высоту окрестности o (film) относительно фрагмента film(wL), которая вычисляется от 1 до e, где e — эксцентриситет фрагмента. Результаты пересечения с fjln рассматриваются относительно этой высоты.
- 4. Вид фрагментов, задающих структурные веса (wL[l]) левой или/и веса правой доли (wR[l]) gs-модели (без циклов — FT, с циклами — F и др.).
- 5. Величину ранга rn (film) (веса вершин левой доли gs-модели).
- 6. Разность рангов r=rn (film) rn (fjln): r=q; r=q1;…; r=2; r=1 (r=p; r=p1;…; r=2; r=1) и вид соотношения фрагментов долей gs-модели.
- 7. Число компонент связности kс в фрагменте-пересечении mсf lij: kс>1 (любое пересечение); kс=1 (связное пересечение — с).
    G C3 C4 | g (G)=wСSl3−4w. | |
  go (G)=wСSl3−4wn. | gs (G)=wD1СSl3−4w. | |
  gso (G)=wD1СSl3−4wn. | g (G)=HwСSl3−4 w. | |
  gso (G)=HwD1С3−4wn. | gso (G)=HwD1С3−4 n. | |
Рис. 1 Граф, анализируемые подграфы типа C3, C4 и примеры моделей
Третий параметр приводит к выделению иерархических g-моделей. Это актуально с позиций исследования полноты локальных функций, и имеет как, теоретический, так и прикладной интерес, связанный с построением эффективных алгоритмов анализа.
Табл. 1.
Автоморфизмы и орбиты групп ,.
Автоморфизмы. | |||||||
(1,2,3). | (1,3,5). | (1,4,5). | (2,3,7). | (2,6,7). | (3,5,7). | ||
(1,2,3). | (2,3,7). | (2,6,7). | (1,3,5). | (1,4,5). | (3,5,7). | ||
(3,5,7). | (1,3,5). | (1,4,5). | (2,3,7). | (2,6,7). | (1,2,3). | ||
(3,5,7). | (2,3,7). | (2,6,7). | (1,3,5). | (1,4,5). | (1,2,3). | ||
Орбиты группы. | |||||||
(1,2,3) (3,5,7). | (1,3,5) (2,3,7). | (1,4,5) (2,6,7). | |||||
Автоморфизмы. | Орбиты. | ||||||
(1,2,7,5). | (1,2,7,5). | ||||||
Табл. 2.
Матрица пересечений пар помеченных подграфов С3 и С4
Матрица МИП C3 с C4 | (p, q) в МИП C3 с C4 | D1. | |||||
(1,2,7,5). | (p, q). | D1. | |||||
(1,2,3). | 2, 1. | ||||||
(1,3,5). | 2, 1. | ||||||
(1,4,5). | 2, 1. | ||||||
(2,3,7). | 2, 1. | ||||||
(2,6,7). | 2, 1. | ||||||
(3,5,7). | 2, 1. | ||||||
(p, q) в МИП C3 с C3 (выше главной диагонали),. и значения D1 (ниже главной диагонали). | |||||||
(1, 2, 3). | (1, 3, 5). | (1, 4, 5). | (2, 3, 7). | (2, 6, 7). | (3, 5, 7). | ||
(1,2,3). | 2, 1. | 1, 0. | 2, 1. | 1, 0. | 1, 0. | ||
(1,3,5). | 2, 1. | 1, 0. | 2, 1. | ||||
(1,4,5). | 1, 0. | ||||||
(2,3,7). | 2, 1. | 2, 1. | |||||
(2,6,7). | 1, 0. | ||||||
(3,5,7). | |||||||
Определение 2. Матрицей смежности вершин иерархической gs-модели HrwlFlwl(G) окружения r называется матрица M_H (G)=||mсf lij||; i=1,2,…, k; j=1,2,…, k; для которой mсf lij максимальное по числу ребер изоморфное пересечение filmfjln, если (filmfjln)(rn (film) =rn (fjln)r), и 0 (или граф межфрагментного соединения) — в противном случае.
В соответствии со значением r различаем три класса gs-моделей: локальные (r=lk=1), квазиглобальные (1.
Табл. 3.
Матрицы пересечений орбит подграфов С3, С4, размеры пересечений и расстояния D1 между орбитами.
12,57. | 15,27. | 15,27. | ||
2,1. | ||||
Орбиты фрагментов, составляющих mcf (С3, С4). | ||||
Расстояния между орбитами. | ||||
D1. | ||||
Орбиты фрагментов, составляющих mcf (С3, С3). | ||||
Расстояния между орбитами. | ||||
D1. | ||||
При рассмотрении четвертого параметра возможны два подхода:
от самых сложных (примарных по вершинам или ребрам) до самых простых, рассматривая последовательно примарные от примарных;
от самых несложных фрагментов (вершины (V), ребра (Е), цепи (Pc), деревья (Tr), леса (Fr)) до самых сложных, рассматривая фрагменты с учетом монотонного роста их индексов сложности [Кохов, 2002].
Новые классы отношений эквивалентности и толерантности графов с учетом сходства расположения фрагментов Пусть заданы gs1=w1DF1lw1F1lw1=(V1LV1R, E1, WV1L, WV1R, WE1) и.
gs2=w2DF2lw2F2lw2=(V2LV2R, E2, WV2L, WV2R, WE2).
Определение 3. gs1 и gs2 изоморфны (gs1gs2), если существуют взаимнооднозначные соответствия: V1L V2L и: V1R V2R, такие что.
viV1L, ujV1R:{vi, uj}E1(({(vi),(uj)}E2)(WE1{vi, uj}=WE2{(vi),(uj)}));
WV1L(vi)WV2L((vi)); WV1R(uj)WV2R((uj)), i=1,2…, рL=V1L, j=1,2,…, рR=V1R.
Определение 4. Графы Gi и Gi эквивалентны по gs-модели wDFlwFlw, если выполняется условие (wDFlwFlw (Gi))(wDFlwFlw (Gi)).
Пусть заданы gso1=w1DF1lw1n= (V1LV1R, E1, WV1L, WVN1L, WV1R, WVN1R, WE1) и gso2= w2DF2lw2n=(V2LV2R, E2, WV2L, WVN2L, WV2R, WVN2R, WE2).
Определение 5. Модели gso1 и gso2 изоморфны (gso1gso2), если существуют 1−1 соответствия: V1L V2L и: V1R V2R, такие что.
viV1L, ujV1R:{vi, uj}E1 (({(vi),(uj)}E2) (WE1{vi, uj} = WE2{(vi),(uj)}));
WV1L(vi) WV2L((vi)); WV1R(uj) WV2R((uj)); WVN1L(vi) = WVN2L((vi));
WVN1R(uj) = WVN2R((uj)), где i=1, 2, …, рL =V1L, j=1, 2, …, рR =V1R.
Определение 6. Графы Gi и Gi эквивалентны по gso-модели wDFlwn, если выполняется условие (wDFlwn(Gi))(wDFlwn(Gi)).
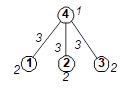
Система стратификации gso-моделей позволяет определять и исследовать широкий спектр отношений эквивалентности (изоморфизм gso-моделей) и сходства (МИП gso-моделей) с учетом сходства расположения фрагментов графа. На рис. 2 приведены примеры новых видов отношений эквивалентности графов.
   1050 10108. | HwD1CSl3−5w n S | |
   Изоциклические графы. | HwD2Cl3−4w n | |
Рис. 2 Примеры графов с одинаковым сходством расположения орбит фрагментов
Обобщенный подструктурный подход на основе стратифицированной системы g-моделей Использование расширяемой по числу анализируемых фрагментов системы g-моделей, приводит к новым аспектам исследования сходства и новым характеристикам сходства:
1. |  2. | |||
3. | ||||
4. | ||||


где dср среднее расстояние между графами; ср индекс среднего сходства между графами; d (Gi, Gj/B) расстояние между векторами расстояний (V_d); (Gi, Gj/B) расстояния между векторами индексов сходства (V_).
На рис. 3 приведены графы, их g-модели, а на рис. 4 приведены графики изменения сходства пар анализируемых графов при использовании системы расширяемых по длине цепей g-моделей.
 G1 | G2 | G3 | |
     HP0−1lc wPlcw (G). | |||
.. . | |||
 HP0−4lc wPlcw (G). | |||
Рис. 3 Графы и их иерархические g-модели



Рис. 4 График изменения расстояний D1 между парами графовна основе МИП g-моделей
b-модели для характеризации сходства расположения фрагментов в графе Если в gs-модели вместо операции использовать операцию и вместо помеченных фрагментов-весов для вершин правой доли использовать их типы (непомеченные фрагменты), то в результате будут построены b-модели [4]. Эти модели позволили: (1) определить более широкий спектр отношений толерантности и эквивалентности графов на основе перехода от орбит расположения фрагментов к классам их эквивалентного расположения, задаваемым базисами структурных дескрипторов (СД); (2) анализировать точность характеризации расположения фрагментов в монотонно расширяемых по значениям индексов сложности базисах СД; (3) заменить экспоненциальный по вычислительной сложности алгоритм определения максимального общего фрагмента gs-моделей на эффективный алгоритм определения максимального общего фрагмента b (gs)-моделей [Кохов, 2002].
Заключение
Предложенные модели позволили разработать обобщенный подструктурный подход к анализу сходства структур систем, учитывающий сходство расположения фрагментов. На основе этих моделей стало возможным эффективное решение задачи определения сходства графов с учетом сходства расположения фрагментов методом замены поиска максимальных общих фрагментов для gs_моделей (50−70 вершин) на поиск максимальных общих фрагментов для b (gs)_моделей (300−400 вершин).
- 1. [Кохов и др., 2004] Кохов В. А., Незнанов А. А., Ткаченко С. В. Компьютерные методы анализа сходства графов. // Десятая Национальная конференция по искусственному интеллекту с международным участием. КИИ-2004: Труды конференции. В 3-х т. Том 1. М.: Физматлит, 2004.
- 2. [Кохов, 2002] Кохов В. А. Концептуальные и математические модели сложности графов. М: Изд-во МЭИ, 2002.
- 3. [Кохов, 2004] Кохов В. А. Граф-модели в структурном спектральном анализе систем. // Труды международной научно-технической конференции «Информационные средства и технологии». (МФИ-2004), Т.1. Москва, 2004.
- 4. [Финн, 1991] Финн В. К. Правдоподобные рассуждения в интеллектуальных системах типа ДСМ. // Итоги науки и техники, сер. «Информатика», Т.15. 1991.