Выбор микроконтроллера для ММУПА
Разрядное арифметико-логическое устройство (АЛУ) основа микроконтроллера, позволяющая выполнять арифметические, логические операции и операции сдвига над данными, представленными в двоичном коде, а также обрабатывать данные, представленные в двоично-десятичном коде; Порты ввода-вывода (формирователь сигналов порта 0 … формирователь сигналов порта 3 и регистр порта 0 … регистр порта 3… Читать ещё >
Выбор микроконтроллера для ММУПА (реферат, курсовая, диплом, контрольная)
Вычислительную и управляющую часть разрабатываемого ММУПА, выполняет однокристальный микроконтроллер.
Микроконтроллеры семейства MCS-51 объединяют все передовые технологии микроконтроллеров: мировое лидерство по гибкой однократно или многократно электрически перепрограммируемой пользователем технологии ППЗУ и минимальное энергопотребление. Эти широкие возможности и низкая стоимость сделали серию микроконтроллеров MCS-51 лучшим выбором для инженерного применения.
По сравнению с другими типами микроконтроллеров семейство MCS-51 обеспечивает достаточную производительность. MCS-51 обладает высоким быстродействием, а операции умножения и деления реализованные на аппаратном уровне по сравнению с большинством наиболее распространённых 8-битовых микроконтроллеров аналогичного класса. Такая производительность позволяет реализовывать различные устройства, работающие в реальном масштабе времени, заменять устройства на жёсткой логике.
Поэтому при разработке дискретного модуля было отдано предпочтение микроконтроллерам семейства MCS-51. Исходя из требований технического задания микроконтроллер должен обладать быстродействием, иметь необходимое число каналов ввода/вывода, последовательный интерфейс SPI, требуемый объем оперативной памяти и памяти программ, таймеры-счетчики. Исходя из этих условий был выбран контроллер фирмы Atmel AT89S8252.
Микроконтроллер AT89S8252 это устройство имеющее 256 байта ОЗУ, 8 Кбайта FLASH памяти программ, 2 Кбайта EEPROM и 32 канала ввода/вывода. В состав микроконтроллера входят и другие устройства:
два таймера-счетчика;
порт последовательной связи (синхронный последовательный порт может поддерживать интерфейс SPI и дополнительно имеется универсальный синхронно-асинхронный приемопередатчик).
Функциональная схема микроконтроллера приведена на рисунке 6.6. Приведенный контроллер осуществляет выбор входного сигнала выставляя на коммутаторе адрес К1. К3 требуемого сигнала. После преобразования сигналов несущих информацию о температуре и давлении газа с помощью АЦП происходит расчет расхода газа, в соответствии с «Правилами измерения расходов газов и жидкостей стандартными сужающими устройствами РД50−213−80». Измеренные и вычисленные параметры газа записываются в энергонезависимую память и ЖКИ.
Кратко рассмотрим функции внутренних блоков микроконтроллера:
8-разрядное арифметико-логическое устройство (АЛУ) основа микроконтроллера, позволяющая выполнять арифметические, логические операции и операции сдвига над данными, представленными в двоичном коде, а также обрабатывать данные, представленные в двоично-десятичном коде;
аккумулятор (АСС) 8-разрядный регистр, предназначенный для записи и хранения результата, полученного при выполнении арифметико-логических операций или операций пересылки;
регистр (В) временного хранения представляет собой 8-разрядный регистр, используемый во время операций умножения и деления. Для других инструкций он может рассматривается как дополнительный сверхоперативный регистр;
счетчик команд (РС) предназначен для формирования текущего 16-разрядног адреса памяти программ и 8/16-разрядного адреса внешней памяти данных;
регистр указателя данных (DPTR) предназначен для хранения 16-разрядного адреса внешней памяти данных;
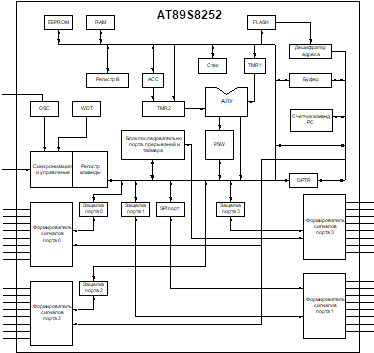
Рисунок 6.6 — Структурная схема контроллера АТ89S825.
регистр состояния программ (PSW) предназначен для хранения данных о состоянии микроконтроллера;
память программ (FLASH) предназначена для хранения и считывания команд, которые поступают в процессор и управляют процессом обработки информации;
память данных (RAM) и (EEPROM) предназначены для записи, хранения и считывания данных получаемых в процессе обработки информации;
блок сторожевого таймера (WDT) предназначенный для сброса при внутренних сбоях и «зависании» микроконтроллера;
таймеры-счетчики (TMR1) и (TMR2) предназначены для подсчета внешних событий, для получения программно управляемых временных задержек и выполнения времязадающих функций микроконтроллера;
блок последовательного порта, прерываний и таймера предназначен для организации ввода-вывода последовательных потоков информации и организации системы прерывания программ;
блок синхронизации и управления предназначен для выработки синхронизирующих и управляющих сигналов обеспечивающих координацию совместной работы блоков микроконтроллера во всех допустимых режимах его работы;
порты ввода-вывода (формирователь сигналов порта 0 … формирователь сигналов порта 3 и регистр порта 0 … регистр порта 3) предназначены для приема и выдачи сигналов обеспечивающих обмен информации микроконтроллера с внешними устройствами;
дешифратор команд представляет собой программируемую логическую матрицу, на вход которой поступает код команды с регистра команд, в котором осуществляется запись и хранение кода команды. С выхода дешифратора команд снимаются управляющие сигналы, осуществляющие выполнение этой команды;
порт SPI предназначен для обмена информацией между микроконтроллером и внешними устройствами по последовательному интерфейсу SPI.
Взаимодействие внутренних блоков микроконтроллера между собой осуществляется по внутренней двунаправленной шине.
К основным параметрам, которые требуются для расчета потребления газа относятся:
диаметр сужающего устройства (СУ);
поправляющий множитель на притупление СУ;
поправляющий множитель на шероховатость трубы;
поправляющий множитель на тепловое расширение;
диаметр трубы перед СУ;
и т.д.
Все они хранятся во внутренней энергонезависимой памяти микроконтроллера объемом 2 Кбайта, что исключает стирание данных при временном отключении питающего напряжения.