Планирование траектории автономного мини-корабля
Планирование движения является одной из фундаментальных проблем в робототехнике. Существует ряд принципиально разных подходов, применимых в различных задачах, таких как метод семплирования, вероятностный метод, методы поиска на графах, метод обобщенных диаграмм Вороного. Наиболее часто используемыми являются методы поиска на графах, такие как A*. Такой метод реализован и в стандартном глобальном… Читать ещё >
Планирование траектории автономного мини-корабля (реферат, курсовая, диплом, контрольная)
В работе рассматривается процесс планирования траектории движения мини-корабля в среде с препятствиями. Приведена структура аппаратного обеспечения системы управления, архитектура программного обеспечения, построенного на базе клиент-серверной модели взаимодействия со слабой связанностью компонентов, в программной среде ROS. Глобальный планировщик разработан с использованием метода диаграмм Вороного. Локальный планировщик (регулятор) предложено реализовать с использованием неустойчивых режимов управления для обхода препятствий вблизи мини-корабля.
Описаны результаты моделирования, показавшие работоспособность предложенных подходов.
Ключевые слова: мини-корабль, управление, планирование, диаграмма Вороного, ROS.
Автономные мини-корабли могут быть полезны для выполнения широкого круга задач, включая мониторинг окружающей среды, работу на загрязненных участках, поисковые и спасательные операции.
Схема использования автономного мини-корабли заключается в следующем. Сначала оператор пункта управления визуально на карте строит миссию. Система управления осуществляет картографирование, обнаружение препятствий и планирование траектории для движения между контрольными точками миссии в обход препятствий.
Предложенная авторами в работе [1 — 5] система автоматического управления позволяет организовать автоматическое движение катера вдоль заданной траектории. В данной статье, являющейся продолжением работы авторов, рассматривается процесс планирования траектории движения катера в среде с препятствиями.
В работе приведена структура аппаратного обеспечения системы управления, архитектура программного обеспечения, построенного на базе клиент-серверной модели взаимодействия со слабой связанностью компонентов, описаны результаты моделирования, показавшие работоспособность предложенных подходов.
Для разработки программного обеспечения авторы используют среду ROS представляющую стандарт де-факто в разработке ПО для робототехники. Данная среда имеет в своем составе стек планирования движения, который лег в основу описанной ниже программной архитектуры системы управления мини-корабля[6]. Однако, для адаптации к объекту управления — мини-кораблю авторами в рамках данной архитектуры разработаны новые программные пакеты в части планирования движения.
Планирование движения является одной из фундаментальных проблем в робототехнике. Существует ряд принципиально разных подходов, применимых в различных задачах, таких как метод семплирования, вероятностный метод, методы поиска на графах, метод обобщенных диаграмм Вороного. Наиболее часто используемыми являются методы поиска на графах, такие как A*. Такой метод реализован и в стандартном глобальном планировщике стека планирования программной среды ROS, который будет рассмотрен подробнее ниже. Данный планировщик строит кратчайший путь в целевую точку в обход препятствий. Однако, в ряде задач, в том числе и при планировании движения мини-корабля длина пути при движении в среде с препятствиями может не являться главным критерием при выборе метода планирования. Важной задачей является построение траектории движения максимально удаленной от препятствий для уменьшения вероятности столкновения с ними. Поэтому в данной работе была выполнена разработка программного пакета планирования глобальной траектории на базе обобщенных диаграмм Вороного для среды ROS, реализация которого в данной среде ранее не существовало.
Аппаратная реализация системы автоматического управления автономного катера. Структура аппаратного обеспечения системы управления автономного мини-корабля показана на рис. 1. При разработке использована парадигма разделения вычислительной части на высокоуровневую (компьютер) и низкоуровневую (микроконтроллерный блок).
архитектура программный серверный аппаратный.
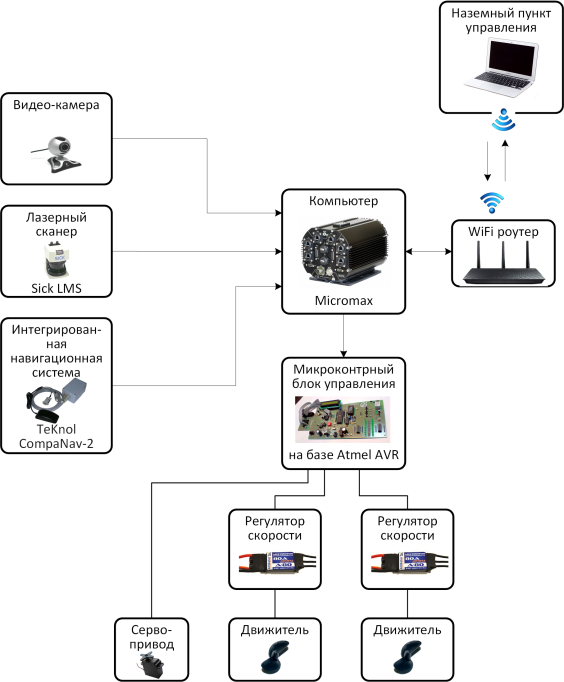
Рис. 1. Аппаратная реализация системы управления мини-корабля
Микроконтроллерный блок получает данные от компьютера или пульта дистанционного управления и генерирует ШИМ-сигнал для управления двигателями и сервоприводами. Компьютер вычисляет требуемые управляющие воздействий в соответствии с алгоритмом управления, выполняет программное обеспечение навигационной системы, и обменивается данными с наземным пунктом управления.
Архитектура программного обеспечения. В качестве операционной системы бортового компьютера используется Ubuntu Linux. Программное обеспечение построено на базе Robot Operating System, что позволяет реализовать слабую связанность компонентов и клиент-серверный шаблон их взаимодействия.
В качестве основы программной архитектуры системы планирования был использован стек ROSNavigation[3], который был сконфигурирован для мини-корабля и существенно переработан в части дополнения модулем планировщика глобальной траектории и локальным планировщиком (регулятором).
Структура программного обеспечения системы управления показана на рис. 2.
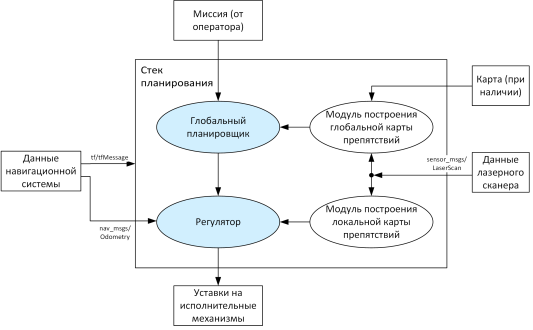
Рис. 2. Структура программного обеспечения
В стеке используются две карты препятствий, которые строятся на основе данных лазерного сканера и навигационной системы, модулем costmap_2dи отличаются назначением и, соответственно, размером и разрешением. Глобальная карта имеет большой размер и предназначена для планирования глобальной траектории движения, локальная карта препятствий имеет меньший размер, большее разрешение и предназначена для обхода близко расположенных препятствий. Глобальная карта используется глобальным планировщиком, локальная — локальным (или регулятором). Глобальный планировщик выполняет поиск плана движения на глобальной карте и передает этот план (в виде последовательности точек) локальному планировщику (регулятору), который рассчитывает управляющие воздействия на исполнительные механизмы для выполнения выработанного плана и одновременно выполняет обход близко расположенных препятствий, даже если это не было предусмотрено глобальным планом (подвижные или неизвестные препятствий).
Описание глобального планировщика приведено ниже. В качестве теоретической базы для реализации регулятора с функцией локального планировщика на базе неустойчивых режимов управления была использованы работа [7].
Планирование глобальной траектории. При планировании движения мини-корабля длина пути при движении в среде с препятствиями может не являться главным критерием при выборе метода планирования. Важной задачей является построение траектории движения максимально удаленной от препятствий для уменьшения вероятности столкновения с ними. Поэтому в данной работе была выполнена разработка программного пакета voronoi_planner [8] планирования глобальной траектории на базе обобщенных диаграмм Вороного для среды ROS, реализация которого в данной среде ранее не существовало.
Диаграмма Вороного множества точек S на плоскости представляет собой такое разбиение плоскости, при котором каждая область этого разбиения образует множество точек, более близких к одной из точек множества S, чем к любой другой точке этого множества. Таким образом, границы областей этого разбиения являются равноудаленными от ближайших двух точек. Обобщенные диаграммы Вороного строятся вокруг множества фигур на плоскости (вместо множества точек) и их границы представляют собой геометрическое место точек удаленных от этих фигур, что можно использовать для построения траектории, наиболее удаленной от препятствий. Существует ряд алгоритмов построения обобщённых диаграмм Вороного и их программных реализаций. В данной работе использована библиотека с открытым исходным кодом dynamicvoronoi[9, 10].
Пакет voronoi_planner реализован как плагин навигационного стека, реализующий интерфейс nav_core:BaseGlobalPlanner. Пакет читает глобальную карту препятствий, преобразует ее и передает в функцию построения обобщенной диаграммы Вороного библиотеки dynamicvoronoi. Далее выполняется поиск пути, включающий 3 этапа: поиск пути от текущей координаты мини-корабля до графа Вороного, поиск пути от целевой точки до графа Вороного и поиск пути на графе Вороного между двумя его точками, расположенными вблизи начального и целевого положения.
Сравнение траекторий, полученных планировщиком A* и voronoi_planner, представлено на рис. 3, 4. Видно, что траектория, полученная планировщиком с использованием диаграмм Вороного, является наиболее удаленной от препятствий.
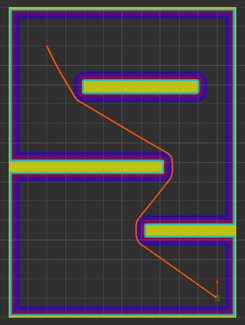
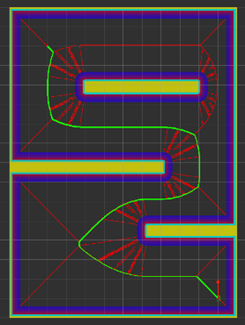
Рис. 3. Сравнение траекторий, полученных планировщиком A* (а) и voronoi_planner (б)
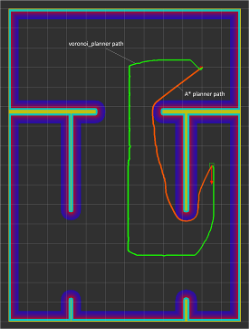
Рис. 4. Сравнение траекторий, полученных планировщиком A* и voronoi_planner, пример 2
Недостатком планировщика voronoi_planner по сравнению с планировщиками на основе поиска на графах, такими как A*, является, безусловно, быстродействие. Однако, из данных оценки быстродействия планировщика voronoi_planner, представленных в таблице № 1 и на рис. 5 видно, что при правильном выборе размера и разрешения карты такой планировщик вполне может использоваться для задачи глобального планирования в реальном времени. Измерение проводилось посредством команд получения отметки времени задания целевой точки и начала поиска rostopicecho /move_base/goal/header/stamp и отметки времени получения плана rostopicecho /move_base/VoronoiPlanner/plan/header/stamp.
Таблица 1. Время получения плана планировщикомvoronoi_plannerдля карт различного размера.
Размер карты. | Среднее время получения плана, c. | |
1200 X 900. | 2,8. | |
800 X 600. | 0,8. | |
600 X 450. | 0,5. | |
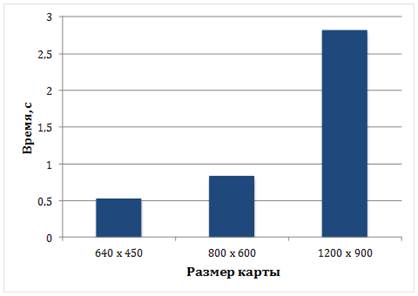
Рис. 4. Время получения плана планировщикомvoronoi_plannerдля карт различного размера
Результаты моделирования. Для подтверждения работоспособности предложенных решений в целом был разработан комплекс моделирования движения мини-корабля. Комплекс позволяет моделировать движение мини-корабля в среде с препятствиями, подавать уставки управления исполнительными механизмами, получать навигационную информацию и данные имитируемого лазерного сканера.
На рис. 5а представлена трехмерное сцена для моделирования задачи выхода мини-корабля из бухты, на рис. 5б — соответствующая карта, полученная посредством имитируемого лазерного сканера, и спланированная траектория движения мини-корабля.
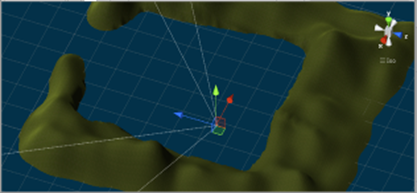
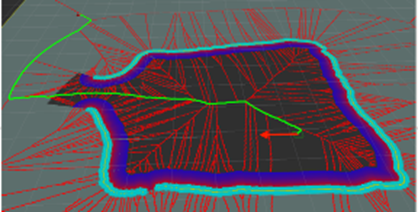
Рис. 5. Моделирование задачи выхода мини-корабля из бухты
Использование комплекса моделирования позволило подтвердить работоспособность предложенных решений и перейти к подготовке натурных испытаний.
Выводы
Предложенные в статье модификации программных компонентов описанной программной архитектуры (глобального планировщика и регулятора) в соответствии с результатами моделирования позволяют использовать предложенные решения для дальнейших натурных экспериментов с мини-кораблем.
- 1. BorisGurenko, Roman Fedorenko, Anatoly Nazarkin Autonomous surface vehicle control system // Applied Mechanics and Materials Journal.- 2014 (ISSN: 1660−9336). — Vol. 704. -p. 277.
- 2. Гуренко Б. В., Федоренко Р. В., Назаркин А. С. Система управления автономного надводного мини-корабля // Современные проблемы науки и образования. — 2014. — № 5,URL:science-education.ru/119−14 511 (дата обращения: 12.10.2015).
- 3. Пшихопов В. Х., Медведев М. Ю., Федоренко Р. В., Гуренко Б. В., Чуфистов В. М., Шевченко В. А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами// Инженерный вестник Дона, 2014, № 4 URL: ivdon.ru/ru/magazine/archive/n4y2014/2579.
- 4. Пшихопов В. Х., Гуренко Б. В. Синтез и исследование авторулевого надводного мини-корабля «Нептун» // Инженерный вестник Дона, 2013, № 4 URL: ivdon.ru/ru/magazine/archive/n4y2013/1919.
- 5. Гуренко Б. В., Федоренко Р. В., Береснев М. А., Сапрыкин Р. В., Переверзев В. А. Разработка симулятора автономного необитаемого подводного аппарата // Инженерный вестник Дона, 2014, № 3 URL: ivdon.ru/ru/magazine/archive/n3y2014/2504/.
- 6. Navigation — ROS Wiki // Robot Operating System URL: wiki.ros.org/navigation (accessed: 20.09.2015).
- 7. Пшихопов В. Х. Управление подвижными объектами в недетерменированных средах использованием неустойчивых режимов // Материалы конференции «Управление в технических, эргатических, организационных и сетевых системах». — Под редакцией С. Н. Васильева, И. А. Каляева, Д. А. Новикова, Г. Г. Себрякова. — 2012. — С. 786−789.
- 8. Voronoi_planner — ROS Wiki // Robot Operating System URL: wiki.ros.org/voronoi_planner (accessed: 20.09.2015).
- 9. B. Lau, C. Sprunk and W. Burgard, Improved Updating of Euclidean Distance Maps and Voronoi Diagrams // IEEE Intl. Conf. on Intelligent Robots and Systems (IROS). — Taipei, Taiwan. — 2010. — pp. 281 — 286.
- 10. Dynamicvoronoi — ROS Wiki // Robot Operating System URL: wiki.ros.org/dynamicvoronoi (accessed: 20.09.2015).