Проектирование регулятора выходного давления насоса
Регулятор-устройство, автоматически поддерживающее в машинах или установках постоянство какого-либо заданного параметра или меняющее его величину по определенному закону. В данном курсовом проекте проектируется и исследуется регулятор давления на выходе насоса. Давление регулируется посредством изменения частоты вращения силового двигателя, приводящего во вращение ротор насоса. Целью данного… Читать ещё >
Проектирование регулятора выходного давления насоса (реферат, курсовая, диплом, контрольная)
На сегодняшний день существует очень много систем автоматического регулирования. Эти системы необходимо исследовать. Исследование дает возможность получить количественную и качественную характеристики действительного процесса.
Моделирование — исследование на лабораторных моделях физических процессов, протекающих в отдельных телах, машинах, сооружениях и других устройствах. Оно позволяет иногда заменить исследование действительного процесса изучением иного процесса, подчиненного тем же закономерностям.
Регулятор-устройство, автоматически поддерживающее в машинах или установках постоянство какого-либо заданного параметра или меняющее его величину по определенному закону. В данном курсовом проекте проектируется и исследуется регулятор давления на выходе насоса. Давление регулируется посредством изменения частоты вращения силового двигателя, приводящего во вращение ротор насоса.
Регулирование скорости электродвигателей — применяемое в электроприводе регулирование скорости вращения. Оно просто осуществляется для электродвигателей постоянного тока и несколько сложнее для электродвигателей переменного тока. В нашем проекте используется способ регулирования частоты вращения, основанный на изменении подводимого к двигателю напряжения при постоянных значениях потока возбуждения и сопротивления в цепи якоря двигателя. Этот способ обеспечивает широкую и удобную регулировку скорости при достаточной экономичности, особенно в мощном электроприводе.
1.
При изменении расхода Q давление на выходе центробежного насоса изменяется (рис.1). Необходимо разработать систему управления электродвигателем насоса для стабилизации давления на выходе (Pст) за счет изменения скорости вращения двигателя.
2.
Pст =0,5 Мпа,.
Q=200ч1000 л/мин.,.
tпп=0,25 с, б=10%,.
где tппвремя переходного процесса, б — динамическая ошибка.
3.
Из справочника [1. с. 19.] был выбран центробежный насос марки 3К-6, обеспечивающий заданные характеристики по P и Q, со следующими параметрами:
мощность на валу насоса.
Nн=12,5 кВт, необходимая мощность на валу электродвигателя.
Nд=20 кВт, полный напор Н=50м=Р=0,5 мПа=500Дж/кг.,.
подача.
Q=60 м3/час=16,7 л/сек=1002л/мин=0,016м3/сек.,.
число оборотов в минуту.
n=2900 об/мин=303,5 рад/сек.,.
к.п.д. насоса з=66,3%.
4.
Из справочника [2. с.382] был выбран двигатель постоянного тока марки 2ПО180LГУХЛ4, обеспечивающий технические данные насоса. Двигатель имеет следующие параметры:
мощность на валу.
Nд=20 кВт, напряжение питания.
Uпит=220 в, номинальная частота вращения.
nном=3000 об/мин=314рад/сек.,.
максимальная частота вращения.
nном=3500 об/мин=366,3рад/сек.,.
к.п.д. двигателя з=90%,.
сопротивление обмотки якоря при 15оС.
Rя=0,025 Ом, индуктивность цепи якоря.
Lя=0,92 мГн, момент инерции якоря двигателя.
Iя=0,23 кг· м2.
5.
Из справочных данных [2. с.39]был выбран датчик давления модели Метран-22-ДА-АС со следующими техническими характеристиками:
выходной аналоговый сигнал 0−20 мА, наличие выносного индикатора, давление на выходе датчика Рд=0,6 Мпа.,.
Uпит=24 В.
Датчик имеет линейно-возрастающую характеристику выходного сигнала.
6.
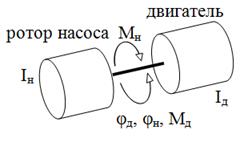
Рис. 2.
Используем уравнение Лагранжа:
где ТУ = УТкин — сумма кинетических энергий всех тел,.
qi — обобщенная координата,.
Qi — обобщенная сила.
В нашей системе присутствует допущение — связь абсолютно жесткая.
Итак,.

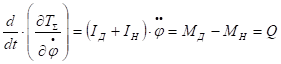
Перейдем к преобразованиям Лапласа:

По этому уравнению можно составить следующую схему:
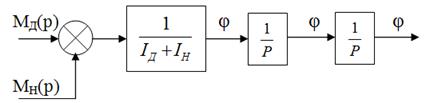
Для простоты произведем замену:
IД+IН=I0.
Теперь нам необходимы моменты инерций двигателя и насоса:
Из табличных значений [2. с.393] момент инерции якоря двигателя IД=0,23кг· м2.
По рекомендации руководителя общий момент инерции возьмем на 30% больше момента инерции якоря двигателя, т. е. (0,23· 30)/100= 0,069 кг· м2.
=> I0 = 0.23+0.069 ?0,3кг· м2.
7.
Двигатель постоянного тока независимого возбуждения:
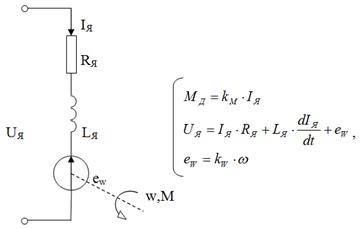
Рис. 3.
Здесь имеется допущение: на самом деле индуктивность может быть непостоянной. Найдем неизвестные:


wmax=wхх=366,3рад/сек.



— рассматривается как одно целое значение ТЭ.

LЯ, RЯ — индуктивность и сопротивление цепи якоря соответственно. Из справочника [2. с.382]:
LЯ = 0,92МГн=0,92Гн.
RЯ = 0,025Ом.
Следовательно:

Момент управления.
Напряжение управления.
Противо ЭДС.
Значение номинального пускового момента можно найти из зависимости момента двигателя от частоты его вращения (рис.4).
При помощи номинального значения частоты вращения и момента нашли точку А. Точка В является значением максимальной частоты вращения. Тогда точка С будет являться значением пускового момента.
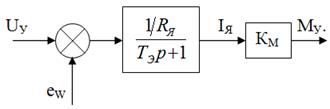
Структурная схема ДПТ выглядит следующим образом:
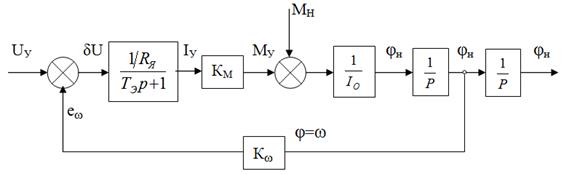
Структурная схема ДПТ с насосом выглядит так:
Данную схему можно преобразовать следующим образом:
Имеется в виду следующая замена:


Таким образом, получилось колебательное звено 2-го порядка. Разложим его на пару апериодических звеньев.

Эту систему уравнений решим в пакете MathCad. Постоянные времени получились комплексными. Значит, данное колебательное звено невозможно разложить на апериодические звенья.

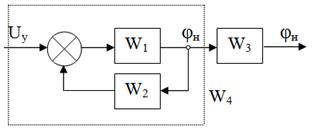
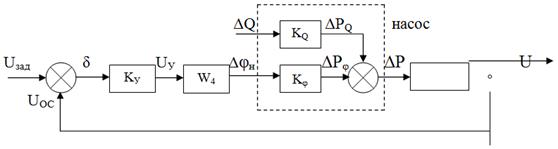
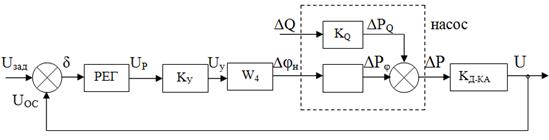
Структурная схема регулирования скорости вращения двигателя выглядит следующим образом:
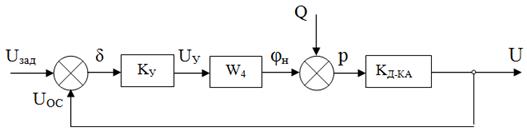
где.
— КУ — коэффициент усиления электронного усилителя. Он находится путем подбора в виду того, что Uзад=5 В, а напряжение питания двигателя Uпит=220 В.
— КД-КА — коэффициент передачи датчика. Он находится из соотношения.

Выведем характеристику потребителя статическую характеристику насоса.
Характеристика потребителя представляет собой зависимость давления на выходе насоса от расхода потребителя.

где сплотность жидкости (воды),.
N — мощность на валу насоса, Вт,.
Q — расход потребителя, м3/сек.,.
P — давление в напорной магистрали насоса, Дж/кг.,.
з — к.п.д. насоса.
Отсюда можно вывести следующую формулу:
Варьируя давлением, получим характеристику потребителя (рис.5).
Теперь выведем статическую характеристику насоса.
Вычислим рабочий объем насоса:

где QHподача насоса,.
n-частота вращения ротора двигателя.
Скорость потока жидкости вычисляется по формуле:

где S — площадь поперечного сечения потока жидкости в нашем случае — напорного патрубка).
Давление на выходе насоса.

Таким образом, варьируя параметром n, получим статическую характеристику насоса (рис.6). Площадь сечения подберем такую, чтобы номинальному значению частоты вращения двигателя n=3000об/мин. соответствовало номинальное значение давления на выходе насоса P=0.5 Мпа. В данном случае диаметр выходного патрубка равен D=2· r=25,4 мм.
Для наглядности системы изобразим графические характеристики зависимостей в пакете MathCad:
Здесь имеется существенный недостаток — обе характеристики насоса нелинейные. Ее необходимо линеаризовать.
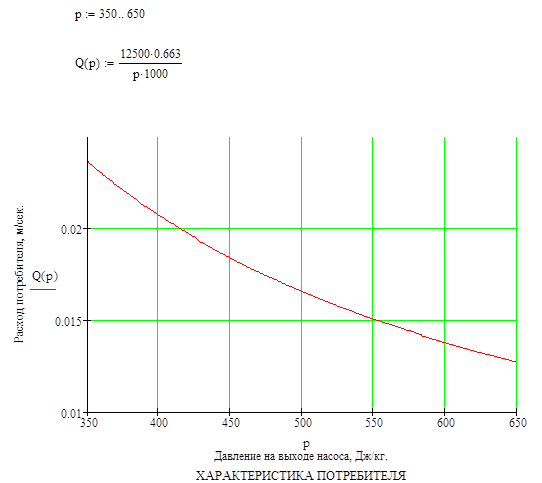
Рис. 5.

Рис. 6.

8.
.
Тогда система будет выглядеть следующим образом:
где КУ =44 — коэффициент усиления усилителя.
К=10,8 — коэффициент, найденный путем линеаризации статической характеристики.
— коэффициент, найденный путем линеаризации характеристики потребителя.
По принципу суперпозиции:
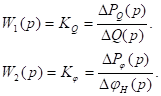
— в операторной форме, тогда выход насоса в операторной форме запишется следующим образом:
— уравнение в отклонениях.
Определим передаточную функцию замкнутой системы по задающему воздействию:
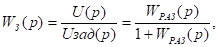

Тогда передаточная функция замкнутой системы будет выглядеть следующим образом:

Определим передаточную функцию системы для ошибки д по возмущению f=Q:

д=UЗ-UОС.
Построим логарифмические характеристики системы по возмущению с использованием пакета MatLab (рис. 10.).
9.
Рассмотрим нашу систему с типовыми П, ПД и ПИД регуляторами соответственно с использованием MatLab (рис. 7,8,9.).
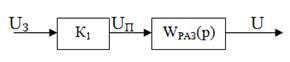
Система с П-регулятором:
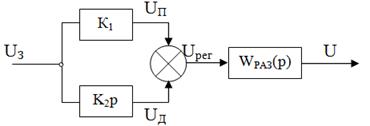
Система с ПД-регулятором:
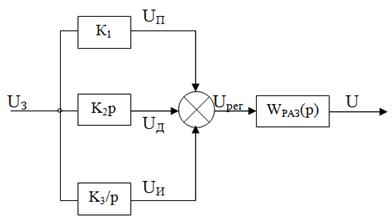
Система с ПИД-регулятором:
Построив ЛАХ и ЛФХ разомкнутых систем с этими регуляторами, мы увидели, что наиболее приемлим ПД-регулятор. Однако я использовал метод желаемых ЛАХ и применил корректирующие звенья (последовательность интегрирующего и интегро-дифференцирующего звеньев, см. ниже).
Синтез регулятора реализуется выбором желаемых частотных характеристик, которые находятся по требованиям устойчивости, качества и точности, а также заданной неизменяемой части системы.
Наряду с желаемыми характеристиками проектировщик должен располагать логарифмическими амплитудными и фазовыми частотными характеристиками неизменяемой части системы.
Передаточная функция разомкнутой системы выглядит следующим образом:

Построим логарифмические характеристики разомкнутой системы с использованием пакета MatLab (рис.11).В области положительных значений фазовая характеристика не пересекает ось -180, но она бесконечно к ней приближается. Значит, запас по фазе очень мал. Необходимо построить желаемую характеристику, которая строится следующим образом:
Сначала необходимо определить желаемую частоту среза [4. с.353]. Исходя из заданных параметров системы время переходного процесса.
tпп=0,25 с, а показатель перерегулирования б=10%.
Следовательно:
Проведем через току прямую с наклоном -20 дб/дек, слева и справа обеспечиваем запас по амплитуде 15дб. В области низких частот проводим сопряжение желаемой и нескорректированной ЛАХ с наклоном -40 дб/дек. В области высоких частот строим желаемую ЛАХ параллельно нескорректированной, т. е. -40 дб/дек. Желаемая ЛАХ изображена на рис. 12.
Найдем сопрягающие частоты в точках, где желаемая ЛАХ принимает значение -15,1 дб, и где происходит сопряжение желаемой и нескорректированной ЛАХ:
Постоянные времени, соответствующие этим частотам:
Тогда передаточная желаемой ЛАХ будет иметь вид:

Теперь можно найти ЛАХ коррекции по формуле:
Корректирующая ЛАХ изображена на рис. 13. По ней видно, что запас по фазе достаточно высок 160.
Передаточная функция корректирующей цепи выглядит следующим образом:

Теперь в систему включен регулятор:
Найдем передаточную функцию желаемой замкнутой системы с помощью пакета Matlab:

Построим переходной процесс желаемой замкнутой системы в Matlab (рис.14).
Судя по переходному процессу можно сделать вывод о соответствии разработанной системы заданным требованиям.
После проведения синтеза системы получим, что электрическая схема корректирующей цепи будет состоять из интегрирующего и интегро-дифференцирующего звеньев.
Расчет интегрирующего звена:
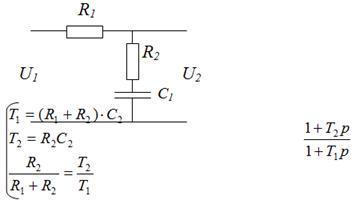
Т1=1,58 сек.
Т2=0,16 сек.
Тогда Возьмем С2=30 мкФ=0,3 Ф, Тогда.
Из справочной литературы [6. c.62.] выберем резисторы следующих марок:
R1 — МЛТ-0,25 — 47,5кОм 5%,.
R2 — МЛТ-0,125 — 5,1кОм2%.
Из справочной литературы [7. c.169] выберем конденсатор марки:
С1 — К10−23-М47−33мкФ.
— конденсатор монолитный керамический.
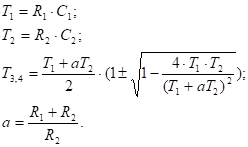
Расчет интегро-дифференцирующего звена:
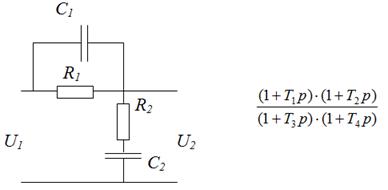
T1=0,0256 сек,.
Т2=0,0256 сек, Т3=1,58 сек, Т4=0,009 сек.







Возьмем С2=10 мкФ, Тогда.
Из справочной литературы [6. c.62.] выберем резисторы следующих марок:
R1 — МЛТ-0,25 — 51кОм 1%,.
R2 — C2−29В-0,125 — 853Ом 0,1%.
Из справочной литературы [7. c.169] выберем конденсаторы марки:
С1 — К10−47-Н30−33мкФ.
С2 — К10−23-М47−30мкФ.
— конденсаторы керамические монолитные.
После выбора номиналов резисторов и конденсаторов, строится электрическая схема корректирующей цепи (регулятора).
10.
Разработанная электрическая схема регулирующего устройства находится в чертежах курсового проекта.
Текст программы регулирующего устройства выглядит следующим образом:
#include.
#include.
#define FCLK 11 059 000.
#define MAX_ADC 0xFF.
#define MAX_P 1000.
#define NOM_P 500.
#define OFFSET_DAC 100.
#define DOPUSK_MIN 5.
#define DOPUSK_MAX 5.
#define STEP_DAC 2.
#define DAC_CS (val).
PORTD_Bit5 = val.
#define DAC_WR (val).
PORTD_Bit4 = val.
void init_ports (void);
void watchdog_on (void);
void delay_ms (unsigned int);
void delay_mks (unsigned int);
void upr_dac (unsigned char);
unsigned char adc_code (void);
const unsigned char min = NOM_P * (1 — DOPUSK_MIN / 100.0) * MAX_ADC / MAX_P;
const unsigned char max = NOM_P * (1 + DOPUSK_MAX / 100.0) * MAX_ADC / MAX_P;
void main (void).
{.
unsigned char dac;
init_ports ();
watchdog_on ();
while (1).
{.
__watchdog_reset ();
dac = adc_code ();
upr_dac (dac);
delay_ms (50);
}.
}.
void init_ports (void).
{.
/* Направление разрядов порта: 0 — Вход; 1 — Выход */.
DDRA = 0×00;
PORTA = 0×00;
DDRB = 0xFF;
PORTB = 0×00;
DDRC = 0xFF;
PORTC = 0×00;
DDRD = 0xFE;
PORTD = 0xFF;
ACSR = (1 << ACD);
ADMUX = MUX0;
ADCSRA = ((1 << ADEN) | (1 << ADSC) | (1 << ADPS1) | (1 << ADPS2));
}.
void watchdog_on (void).
{.
__watchdog_reset ();
WDTCR |= (1 << WDTOE) | (1 << WDE);
WDTCR = (1 << WDP0) | (1 << WDP1) | (1 << WDP2) | (1 << WDE);
}.
void delay_ms (unsigned int wt).
{.
do {.
__delay_cycles ((FCLK / 1000));
} while (—wt);
}.
void delay_mks (unsigned int wt).
{.
do {.
__delay_cycles ((FCLK / 1 000 000));
} while (—wt);
}.
void upr_dac (unsigned char code).
{.
DAC_CS (0);
delay_mks (5);
PORTB = code;
delay_mks (5);
DAC_WR (0);
delay_mks (5);
DAC_WR (1);
DAC_CS (1);
}.
unsigned char adc_code (void).
{.
static unsigned char count;
static unsigned char dac;
static unsigned int dt_current_code_adc;
static unsigned int zd_current_code_adc;
static unsigned int dt_release_code_adc;
static unsigned int zd_release_code_adc;
if (!(ADCSRA & (1 << ADSC))).
{.
if (ADMUX == MUX0).
{.
dt_current_code_adc += ADC;
ADMUX = MUX1;
}.
else.
{.
zd_current_code_adc += ADC;
ADMUX = MUX0;
count++;
}.
ADCSRA = ((1 << ADEN) | (1 << ADSC) | (1 << ADPS1) | (1 << ADPS2));
if (count >= 10).
{.
dt_release_code_adc = (dt_current_code_adc / count);
dt_current_code_adc = 0;
zd_release_code_adc = (zd_current_code_adc / count);
zd_current_code_adc = 0;
count = 0;
dt_release_code_adc >>= 2;
if (dt_release_code_adc < min).
dac = zd_release_code_adc — dt_release_code_adc + STEP_DAC;
zd_release_code_adc >>= 2;
if (dt_release_code_adc > max).
dac = zd_release_code_adc — dt_release_code_adc — STEP_DAC;
}.
}.
return dac;
}.
Заключение
Целью данного проекта была разработка регулятора выходного давления насоса. В процессе разработки регулятора были частично закреплены знания по теории автоматического управления, разработке электрических схем, разводке и изготовлению печатных плат, графической проектировке нашей системы и программированию микроконтроллеров.
Разработанная система удовлетворяет заданным требованиям по времени переходного процесса и по динамической ошибке. Система устойчива. В целом можно сказать, что проделана довольно сложная работа. Курсовое проектирование на этом завершено.
регулятор давление насос.
- 1. Насосы. Каталог-справочник, 3-е изд., испр. М.-Л., Машгиз, 1960.
- 2. Справочник по электрическим машинам п/р. П. И. Копылова.
- 3. Датчики давления. Сведения из интернета.
- 4. Теория систем автоматического регулирования. В. А. Бесекерский, Е. П. Попов. Издание второе, исправленное. Москва, 1972.
- 5. Электротехнические чертежи и схемы. К. К. Александров, Е. Г. Кузьмина. Москва Энергоатомиздат, 1990.
- 6. Справочник по резисторам. В. В. Дубравский, Д. М. Иванов, п/р И. И. Четверткова и В. М. Терехова, 1991;528 с.
- 7. Справочник по по электрическим конденсаторам. М. Н. Дьяконов, В. И. Карабанов, В. И. Пресняков, 1983;376 с.