Сходимость алгоритмов оптимизации
По и процессы с регулятором Л' 35 по приблизительно совпадают и показаны на рисунке В тех же условиях в ПИД-регуляторе было применено офаничение полосы дифференцирующего тракта: в этот тракт был введен фильтр первого порядка с постоянной времени Tj = 0,004 с; результаты показаны на рис. 5.30−5.31. Для регулятора по 4%^ это ничего не дало, но для регулятора по Ч'™ отмечено улучшение качества… Читать ещё >
Сходимость алгоритмов оптимизации (реферат, курсовая, диплом, контрольная)
Выше рассмотрен ряд интегральных критериев, которые могут играть роль стоимостных функционалов при оптимизации регулятора. Для выбора того или иного критерия из известного набора необходимы рекомендации, выработанные на основании сравнительного изучения эффективности этих критериев в различных условиях. Эти вопросы могут решаться моделированием и накоплением статистики.
Наиболее часто встречаются задачи управления объектами не очень высокого порядка, но с определенными особенностями, такими как транспортное запаздывание. Кроме того, каждый объект имеет ограничение по входному управляющему воздействию, что также целесообразно учесть. Поэтому за основу примера выбран объект второго порядка, который уже исследовался как представительный другими авторами, занимающимися оптимизацией цифрового управления, что облегчает сопоставление результатов, но модель объекта усложнена введением нелинейного звена и запаздывания.
Пусть передаточная функция линейной части объекта с запаздыванием дана в следующем виде:

Здесь К = 20, ?=10, М= 1, т = 0,1 sec. Введем ограничение на управляющий сигнал:

Здесь U](t) — промежуточная величина. Передаточная функция ПИД-регулятора имеет вид.

Пусть критерий оптимизации 4* wv задан в виде [3]:

где e (t) — ошибка управления; Т — время моделирования переходного процесса. Результаты получены моделированием в программном обеспечении VisSim 5.0.
В результате оптимизации с критериями, содержащими модуль ошибки e (t) в первой степени, результат оптимизации существенно зависит от стартовых значений, что связано с наличием большого числа локальных минимумов стоимостного функционала. Кроме того, при подходе к оптимальным значениям процедура поиска истинного оптимума затягивается. Это вызвано слишком малым градиентом функционала по искомым параметрам регулятора. В этом случае целесообразно изменение параметров регулятора вверх и вниз на 10% и возобновление оптимизации. На рис. 5.20 представлены результаты как 37 различных настроек ПИД-регуляторов для объекта по уравнению (5.15).
Были использованы критерии от Ч/1|| до и от 4^, до 4'2)6, результаты показаны как ряд значений {КР, К/, К/>} для регулятора (5.15). На рис. 5.21−5.22 приведены переходные процессы для различных локальных экстремумов, соответствующих критерию 4/1|3 (нумерация внизу приведена в порядке возрастания быстродействия). На рис. 5.23 и рис. 5.24 приведены переходные процессы для различных локальных экстремумов, соответствующих другим критериям. Среди регуляторов 17−21 наилучши. м представляется регулятор N 18, а среди регуляторов 22−30 наилучший — N 30. В ряду рис. 5.20 регуляторы 1−4 получены по критерию У,!, регуляторы 5−8 — по У12; 9−15 — по; 16;
20 — по У||4; 22, 23, 24 — по У21, У^, У2|3; 25−26, 27−28 и 29−30 — по 4V4V и У2|6.
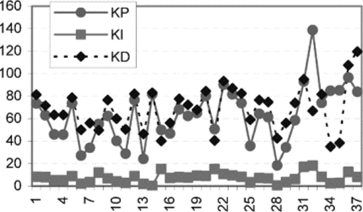
Рис. 5.20. Результирующие настройки ПИД-рсгуляторов.
Таким образом, продемонстрировано влияние гауссова шума на выходе объекта на результат управления. На рис. 5.25−5.26 показаны графики переходных процессов, получаемых при наложении шума для регуляторов, оптимальные значения которых были найдены в отсутствии шума, т. е. регуляторов из ряда, показанного на рис. 5.20, на котором показаны процессы в системе с регуляторами, полученными по тем же самым критериям, но в условиях действия шума при работе процедуры оптимизации.
Процессы с регулятором N 26 (рис. 5.26) близки по виду к процессам (рис. 5.27). Регулятор, получаемый по критерию У2|4, наименее подвержен влиянию шума. Далее для наглядности стандартное отклонение шума было увеличено в пять раз, после чего сопоставлялись переходные процессы в регуляторах, получаемых процедурой оптимизации в условиях шумов, результаты показаны на рис. 5.28−5.29. Регуляторы 31−32 и 37 получены по критерию T2[j, регуляторы 33−34 по Ч^., 35 и 37 — по Т2;6, причем регуляторы 36 и 37 получены с ограничением полосы дифференцирующего факта фильтром Tj- 0,004 с.
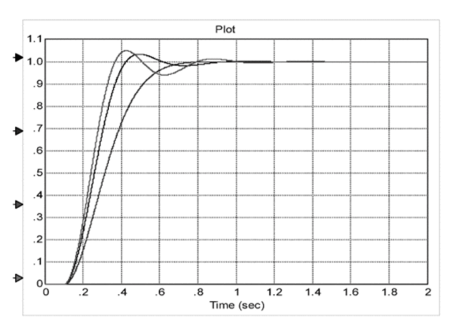
Рис. 5.21. Переходные процессы в системе с регулятором N 17, 18 и 16 (наилучший регулятор N 18).
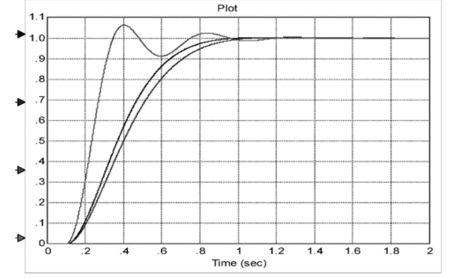
Рис. 5.22. Переходные процессы в системе с регулятором регуляторы N 20, 19 и 21.
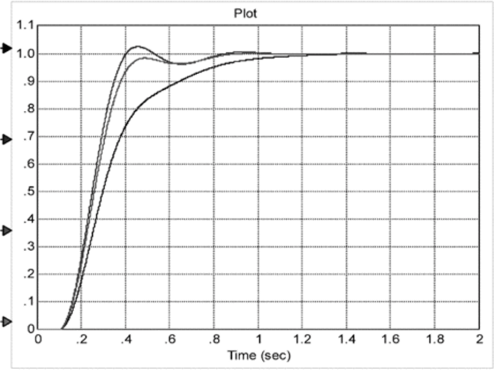
Рис. 5.23. Переходные процессы в системе с регуляторами W 22,23 и 24.
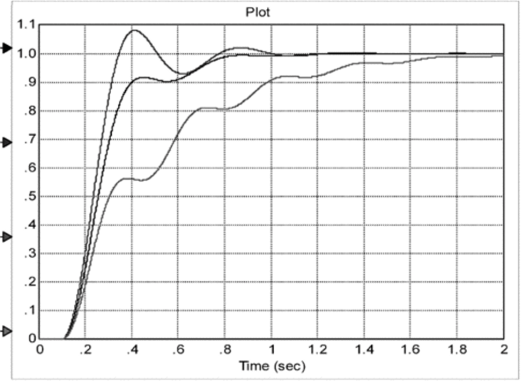
Рис. 5.24. Переходные процессы в системе с регуляторами 26, 27 и 30 (наилучший регулятор N 30).
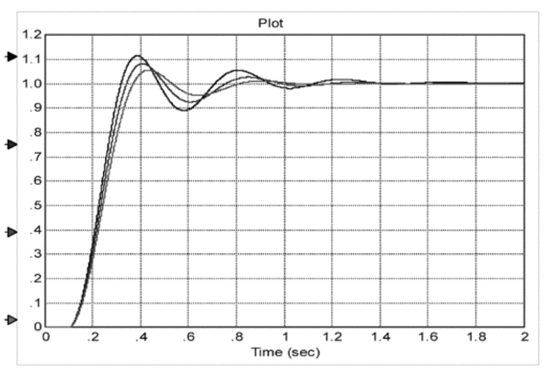
Рис. 5.25. Переходные процессы с регуляторами, получаемыми мри наложении шума для регуляторов, оптимальные значения которых были найдены в отсутствии шума N 22, 23 и 24.
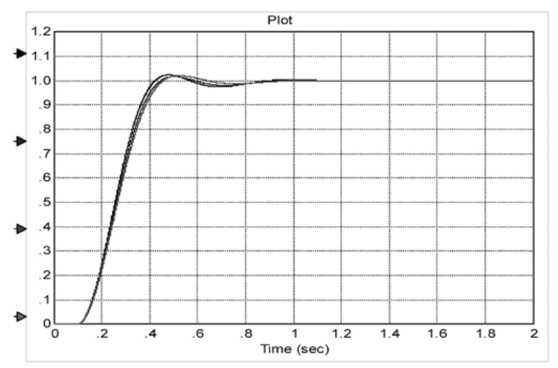
Рис. 5.26. То же, что на рис. 5.25, с регуляторами N 26, 27 и 30.
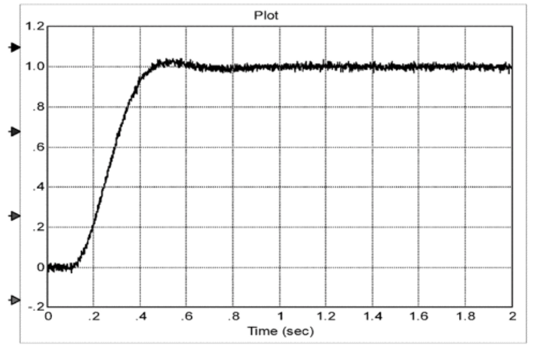
Рис. 5.27. Переходные процессы при воздействии возмущения на выходе в виде гауссова шума со среднеквадратичным значением, а = 0,01 с регулятором N 30.
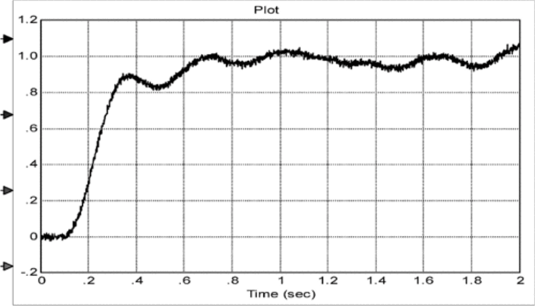
Рис. 5.28. Переходные процессы при воздействии возмущения на выходе в виде гауссова шума со среднеквадратичным значением, а = 0,01 с регулятором N 31 по критерию в присутствии указанных шумов.
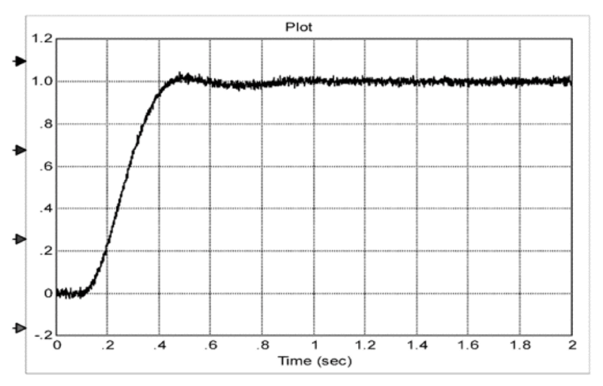
Рис. 5.29. Переходные процессы в системе при воздействии возмущения на выходе в виде гауссова шума со среднеквадратичным значением, а = 0,01 с регулятором /V 33.
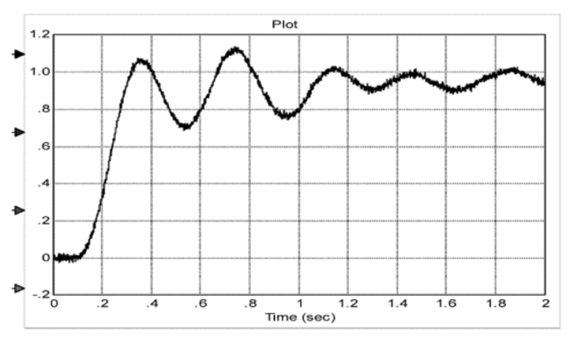
Рис. 5.30. Переходные процессы в системе при воздействии возмущения на выходе в виде гауссова шума со среднеквадратичным значением, а = 0,01 с регулятором N 32 по критерию Ч^ в присутствии шумов.
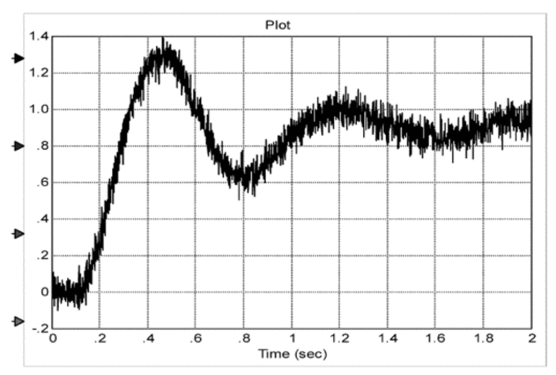
Рис. 5.31. Переходные процессы при воздействии на выходе объекта гауссова шума, а = 0,05: процессы с регулятором N 34.
по и процессы с регулятором Л' 35 по приблизительно совпадают и показаны на рисунке В тех же условиях в ПИД-регуляторе было применено офаничение полосы дифференцирующего тракта: в этот тракт был введен фильтр первого порядка с постоянной времени Tj = 0,004 с; результаты показаны на рис. 5.30−5.31. Для регулятора по 4%^ это ничего не дало, но для регулятора по Ч'™ отмечено улучшение качества переходного процесса.
Вывод 8. Оптимизация объекта в присутствии высокочастотных шумов может привести к снижению качества получаемой системы; введение фильтра, офаничиваюшсго полосу дифференцирующего тракта, улучшает ситуацию.