Преобразовательная характеристика.
Системы автоматического управления высшей точности
Если применить два последовательно включенных фильтра ВЧ для фильтрации сигнала, показанного на рис. 9.7, то получим сигнал, практически свободный от НЧ компоненты, как показано на рис. 9.9. Для нестационарных датчиков имеется также зависимость чувствительности от времени (которая чаще всего неизвестна в аналитическом виде). Рис. 9.7. Результат одновременного измерения медленного изменения… Читать ещё >
Преобразовательная характеристика. Системы автоматического управления высшей точности (реферат, курсовая, диплом, контрольная)
Для каждого датчика можно вывести идеальное (теоретическое) соотношение, связывающее сигналы на его входе и выходе. В идеальном датчике сигнал на его выходе S однозначно соответствует значению внешнего воздействия 5. Это соотношение задано в виде таблицы, графика или математического выражения S = /(s). Это теоретическое выражение иногда называют передаточной функцией [27], но поскольку этот термин имеет совершенно иной смысл в теории автоматического управления, то предпочтителен термин «преобразовательная характеристика» (ПХ) [28]. ПХ может быть как линейной, так и нелинейной (например, логарифмической, экспоненциальной или степенной). ПХ может зависеть от многих параметров, а может быть одномерной, т. е. связывать выходной сигнал лишь с внешним воздействием.
Линейная одномерная ПХ имеет следующий вид:

где а — константа, равная значению S при s = 0; b — наклон прямой или чувствительность датчика; S — та характеристика электрического сигнала (напряжение, ток, частота колебаний, фаза и т. д.), которую устройства дальнейшего преобразования сигналов воспринимают в качестве выходного сигнала датчика. Логарифмическая, экспоненциальная и степенная преобразовательные характеристики имеют, соответственно, следующий вид:

где к — постоянное число.
Иногда ПХ датчика невозможно описать аппроксимирующими выражениями (9.8)—(9.10). Могут применяться полиномиальные аппроксимации более высоких порядков. Для нелинейных передаточных функций чувствительность b не является константой, как это было в случае линейных зависимостей. Для каждого конкретного значения входного сигнала Ь0 ее можно определить в виде.

Для нестационарных датчиков имеется также зависимость чувствительности от времени (которая чаще всего неизвестна в аналитическом виде).
В рамках требуемой точности часто нелинейные датчики допустимо считать линейными внутри заданного ограниченного диапазона значений s. Для более широкого диапазона значений нелинейная ПХ представляется в виде нескольких отрезков прямых линий (кусочно-линейной аппроксимацией).
Чтобы определить, может ли данная ПХ быть представлена в выбранном виде линейной или иной модели зависимости, необходимо убедиться, что погрешность определения измеряемой величины по получаемым выходным сигналам с учетом этой модели не выходит за допустимые пределы.
Если на выходной сигнал датчика оказывают влияние несколько внешних воздействий, его ПХ становится многомерной.
Допустим, с помощью инфракрасного фотоприемника требуется измерить мощность света. Как правило, такой фотоприемник чувствителен не только к свету, но и к изменениям температуры. Поскольку температура изменяется достаточно медленно, то быстрые изменения освещенности фотоприемника легко различить на фоне суммарного сигнала. Действительно, смоделируем ситуацию, положив частоту колебаний тепла в 100 раз меньше, чем частота световых колебаний. Если даже амплитуда таких колебаний одинакова, суммарный сигнал будет иметь вид, как показано на рис. 9.7. Применив фильтр высоких частот первого порядка, получим сигнал, который преимущественно содержит высокочастотную компоненту, а от низкочастотной компоненты осталась очень малая часть, как показано на рис. 9.8. Здесь передаточная функция фильтра ВЧ имеет вид.

Черной линией на графике рис. 9.8 показана средняя линия оставшегося сигнала, которая получена путем фильтрации сигнала, показанного синей линией, с помощью фильтра второго порядка со следующей передаточной функцией: 
Если применить два последовательно включенных фильтра ВЧ для фильтрации сигнала, показанного на рис. 9.7, то получим сигнал, практически свободный от НЧ компоненты, как показано на рис. 9.9.
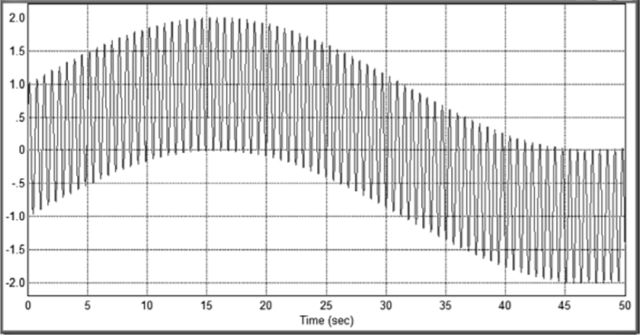
Рис. 9.7. Результат одновременного измерения медленного изменения температуры и быстрого изменения освещенности (имитация).

Рис. 9.8. Результат фильтрации сигнала по рис. 9.7 фильтром вида (9.12).
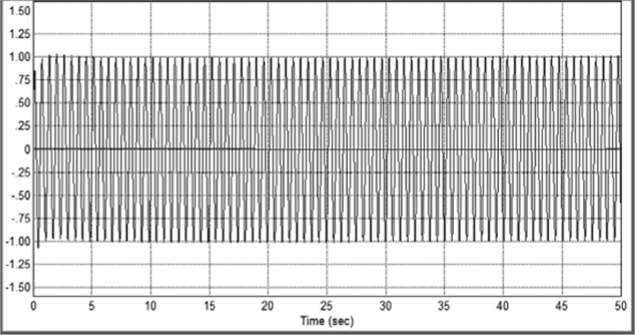
Рис. 9.9. Результат фильтрации сигнала по рис. 9.7 двумя последовательными фильтрами вида (9.12).