Контроль маршрута следования подвижного состава

Для получения более детальных данных относительно маршрута движения используются методы слежения (vehicle tracking) и трассирования (vehicle tracing) ПС, которые часто заменяются одним понятием контроля работы ПС. Это связано с тем, что, как правило, использование только одного метода не позволяет определить местоположение ПС с высокой точностью и надежностью. На практике используют комбинацию… Читать ещё >
Контроль маршрута следования подвижного состава (реферат, курсовая, диплом, контрольная)
Для получения более детальных данных относительно маршрута движения используются методы слежения (vehicle tracking)[1] и трассирования (vehicle tracing)[2] ПС, которые часто заменяются одним понятием контроля работы ПС. Это связано с тем, что, как правило, использование только одного метода не позволяет определить местоположение ПС с высокой точностью и надежностью. На практике используют комбинацию методов на основе различных датчиков, классификация которых приведена на рис. 2.23.
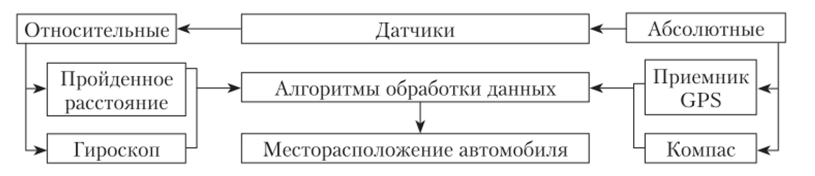
Рис. 2.23. Датчики, используемые для определения местонахождения ПС.
Абсолютное определение местоположения ПС позволяет получить данные о географических широте и долготе, скорости и времени измерения, но требует наличия соответствующей инфраструктуры в виде космической или наземной навигационной инфраструктуры, средств связи и т. п., о чем подробно речь будет идти ниже.
Использование датчиков относительного местоположения представляет собой наиболее простое решение. Метод основан на суммировании приращения траекторий и углов направления движения относительно начальной точки. Конечные координаты ПС {хгг уп} определяются по формулам.
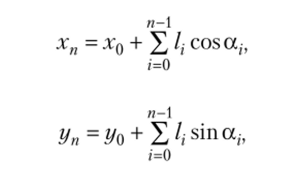
где {х0, у о) — исходные координаты ПС; /, — расстояние, пройденное на i- м участке без изменения направления; а, — угол вектора направления.
Основной недостаток метода заключается в суммировании погрешностей при каждом измерении. Избежать этого можно за счет уменьшения интервала между началом нового измерения. Для этого используются датчики абсолютного положения ПС. Для маршрутных автобусов начальной точкой отсчета может являться остановочный пункт, местоположение которого заранее известно.
Трассировщики — это устройства для отслеживания трассы и режимов работы ПС. Основой этих устройств являются датчики для относительных измерений пройденного расстояния и направления движения. Для измерения пройденного расстояния используются датчики, которые устанавливаются на приводном валу трансмиссии или колесах. В трансмиссии используются датчики следующих типов:
- • электромагнитные — вырабатывают напряжение в виде синусоиды, пропорциональное скорости вращения по амплитуде и частоте (в связи с тем, что такие датчики непригодны для низких скоростей вращения и им свойственны нелинейные искажения, их использование на практике незначительно);
- • датчики Холла — генерируют выходное напряжение прямоугольной формы, размах амплитуды которого не зависит от скорости вращения; требуют очень точной установки и защиты от высоких температур и магнитных полей.
На колесах используются следующие датчики:
- • датчики вращения постоянного тока — вырабатывают напряжение, пропорциональное скорости вращения по амплитуде;
- • импульсные датчики — генерируют импульс на каждый оборот вала (для этого могут использоваться индуктивные, электроконтактные, вихревых токов или оптоэлектрические измерители).
Для измерения угла поворота ПС используются гироскопы, которые в зависимости от принципа действия подразделяются на механические, оптические, пневматические и вибрационные. На автомобилях чаще всего используют вибрационные гироскопы, изготовленные из искусственного кварца, которые отличаются высокой надежностью и стабильностью показаний.
В современных системах все чаще используется система дифференциальных измерений. В этом случае на передней или задней оси устанавливаются два импульсных датчика пройденного расстояния на левом и правом колесах. Путем усреднения показаний обоих датчиков определяют пройденное расстояние, а разность частот импульсов используется для определения изменения направления движения (угла поворота). Достаточно точная коррекция показаний датчиков возможна, если в памяти устройства записана цифровая карта местности.
При наличии дополнительных датчиков в устройстве может записываться и иная информация. Карточка памяти извлекается из устройства после окончания рейса или смены, и ее данные сравниваются с плановыми.
Российский опыт Примером технического средства на основе гироскопа, обеспечивающим решение задачи трассировки, является разработанная в ОАО «ВНИИтрансмаш» (г. СанктПетербург) автоматизированная бортовая информационно-измерительная система (БИИС), решающая задачи контроля параметров и характеристик технологического процесса пассажирских перевозок.
БИИС обеспечивает решение задачи автоматизированного контроля пространственно-временного положения ПС на маршруте в соответствии с расписанием (графиком) без использования каких-либо внешних специализированных технических средств (например, радиомаячков или контрольных пунктов, расположенных на трассе движения, спутниковой навигационной системы и др.), что обеспечивает полную независимость от транспортно-дорожной инфраструктуры города, а также от технических средств, находящихся в ведении других ведомств (например, GPS), а также существенно снижает стоимость всей системы. Это позволяет привязать данные о текущем техническом состоянии автобуса к пространственно-временной шкале и использовать информацию, накапливаемую в БИИС в процессе движения, при анализе ДТП и других нештатных ситуаций на маршруте (функция «черного ящика»).
Информационный обмен между БИИС и внешними устройствами обработки данных (например, автоматизированными рабочими местами диспетчерского персонала) осуществляется с использованием «твердого» носителя (флэш-карты), который используется также в качестве электронного путевого листа.