Технические средства автоматизации работ в экстремальных условиях
Система технического зрения (СТЗ) предназначена для осмотра полости котла реактора с помощью телекамеры, установленной на манипуляторе. Управление СТЗ производится в автоматизированном режиме с использованием компьютера. Перед началом работы котла производится осмотр его полости из различных положений манипулятора. Серия полученных в процессе осмотра опорных изображений запоминается в памяти… Читать ещё >
Технические средства автоматизации работ в экстремальных условиях (реферат, курсовая, диплом, контрольная)
Работы на атомных станциях
Работы на атомных станциях сопряжены с опасностью, связанной с радиацией. При автоматизации различных работ в атомных реакторах, прежде всего, преследуется цель обеспечения безопасности обслуживающего персонала. Необходимо обследовать реактор перед каждым запуском и удалять из него посторонние предметы, которые могут привести к повреждению элементов рабочего контура реактора в процессе его функционирования.
Специфика автоматизации работ в атомном реакторе определяется сложностью его внутренней структуры, существенно ограничивающей рабочую зону перемещения автоматических устройств. Неравномерно расположенные несущие конструкции и трубчатые рабочие элементы реактора диктуют необходимость использования многозвенного манипулятора, способного при перемещении конечного звена адаптивно направлять его по доступному пространству к области возможного нахождения посторонних предметов, которые, как правило, могут располагаться в нижней зоне реактора. Таким образом, при стационарном выполнении робототехнического комплекса длина манипулятора должна быть больше высоты реактора.
Общая схема робототехнического комплекса для работ в атомном реакторе приведена на рис. 3.1.
Управление комплексом осуществляет оператор, находящийся в безопасной зоне, с помощью пульта управления с монитором, на котором отображается вся информация об окружающей среде и текущем положении конечного звена манипулятора, поступающая от измерительной системы.

Рис. 3.1 Общая схема робототехнического комплекса для работ в атомном реакторе
Команды с пульта управления через информационную линию связи поступают на исполнительные устройства робота. В качестве робота в зависимости от диапазона его назначения может быть использован стационарный робот или транспортный робот с манипулятором на борту.
На многозвенном манипуляторе робота устанавливается измерительный блок, состоящий из инерциальной навигационной системы и системы технического зрения. С помощью измерительного блока осуществляется распознавание сцены окружающей среды и наведение захватного устройства манипулятора на объект, подлежащий удалению из реактора.
Захватное устройство манипулятора реализует захват объекта, используя информацию о его положении и размерах. Конструкция захватного устройства должна выбираться, исходя из обеспечения наиболее широкого диапазона возможности захвата предметов различных форм и размеров.
Принцип функционирования измерительного блока поясняется схемой на рис. 3.2.

Рис. 3.2. Схема функционирования измерительного блока
Телекамера, установленная на манипуляторе, передает изображение окружающей среды в систему управления, которая анализирует полученную информацию и принимает решение о дальнейшей траектории движения манипулятора или об обнаружении объекта, подлежащего удалению.
В случае обнаружения объекта система управления задействует инерциальную систему для навигации и контроля движения захватного устройства с высокой точностью, позволяющей использовать характерные параметры обнаруженного объекта для его захвата.
Система технического зрения (СТЗ) предназначена для осмотра полости котла реактора с помощью телекамеры, установленной на манипуляторе. Управление СТЗ производится в автоматизированном режиме с использованием компьютера. Перед началом работы котла производится осмотр его полости из различных положений манипулятора. Серия полученных в процессе осмотра опорных изображений запоминается в памяти компьютера с указанием координат точек наблюдения. В процессе последующей проверки котла он осматривается ТВ-камерой из тех же точек наблюдения, а полученные изображения сравниваются с опорными изображениями. В результате попарного сравнения этих изображений обнаруживаются дефекты и выявляются их позиции на изображениях.
Для измерения трехмерных координат в точках, представляющих интерес, манипулятор по команде оператора осуществляет параллельный перенос ТВ-камеры, что позволяет получить стереопару изображений и автоматически вычислить по ней трехмерные координаты для любой точки, указанной оператором на одном из парных стереоизображений.
В системе технического зрения предусмотрены следующие функции:
- • совмещение моноизображений (эталонного и текущего) программными средствами по критерию наименьшего рассогласования.
- • анализ моноизображений для обнаружения инородных объектов и идентификации зоны внимания.
- • измерение трехмерных координат в зоне внимания по стереоизображениям.
Реализация первых двух функций требует разработки проблемно ориентированных алгоритмов и соответствующих программных средств. Вторая функция может быть выполнена оператором посредством визуального анализа изображений или автоматически с помощью алгоритмов идентификации. Уровень проработки СТЗ включает визуальный анализ моноизображений с целью обнаружения инородных объектов и автоматизированное измерение трехмерных координат по указанию оператора (третья функция). Программное обеспечение для выполнения перечисленных функций позволяет работать в режиме реального времени, которое определяется реакцией оператора на обстановку внутри атомного реактора.
Система визуализации и дистанционных измерений является неотъемлемой частью робототехнического комплекса и позволяет производить измерения, ориентироваться в обстановке и взаимодействовать с окружающей средой. Для доставки конечного звена манипулятора к постороннему предмету с целью его извлечения требуется непрерывная обратная связь, получаемая от системы зрения. Для управления роботом с целью извлечения посторонних предметов недостаточно только структурного описания сцены и обобщенного геометрического представления объектов. При проведении этих ответственных работ в сложных условиях требуются надежные и точные стсреофотограмметрические измерения под контролем человека-оператора.
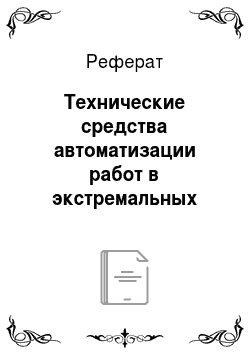
В настоящее время в качестве конечного результата систем технического зрения преимущественно используется структурное представление сцены, обобщенное геометрическое представление объектов сцены в сочетании со сгереовизуализацией. Применительно к рассматриваемой задаче наиболее подходящей является оптическая система, позволяющая получать визуальную информацию о внешней среде практически без ограничения по дальности, с измерением координат точек в ближайшей зоне методами триангуляции. Роботы, оснащенные такими системами, считаются «зрячими», про них говорят, что они обладают системами «зрения роботов». Зрение робота является подклассом технического зрения в том смысле, что оно использует принципы технического зрения для решения прикладных задач в условиях временных, ограничений. Круг вопросов, решаемых в машинном зрении, связан с разработкой теории, методов и алгоритмов анализа изображений. Взаимосвязь зрения робота, технического зрения и машинного зрения иллюстрируется схемой, показанной на рис. 3.3.
Для управления роботом с участием человека-оператора может быть использована концепция обобщенной интеллектуальной машины. Главными функциями, реализованными в интеллектуальной машине, являются инструкции для понимания окружающей обстановки и принятия решения, поступающие от оператора (рис. 3.4).
Инструкция понимания предполагает наличие взаимодействия человека-оператора с машиной. Создание удобного и эффективного человеко-машинного интерфейса представляется ключевой проблемой.
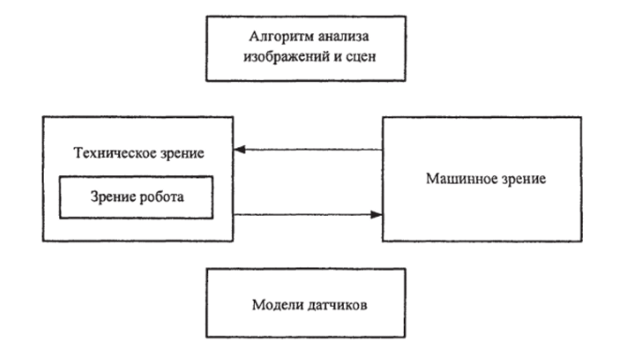
Рис. 3.3. Принципиальная схема человеко-машинной системы для управления роботом с использованием технического зрения
При этом человек-оператор организует целенаправленное поведение робота с учетом изменяющейся внешней среды. Значительная роль в этой концепции отводится зрению. Именно зрение робота осуществляет обратную связь, необходимую для управления роботом, причем ее реализация связана с быстрой обработкой и анализом получаемых изображений с целью построения трехмерного описания среды окружения робота. Эта информация используется для управления безопасным перемещением манипулятора и извлечением посторонних предметов. Система должна обладать дополнительными измерительными функциями для получения дальнометрической информации в реальном масштабе времени, причем реальный масштаб времени определяется оператором. Фотограмметрическая система зрения, предназначенная для использования в системе управления роботом, должна удовлетворять определенным требованиям, а именно, характеризоваться приспосабливаемостью получаемой трехмерной модели функционального пространства к задачам управления и способностью производить высокоточные и надежные по избыточным показаниям датчика измерения.
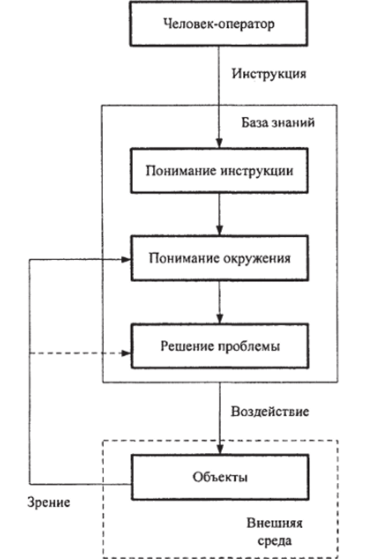
Рис. 3.4. Схема принятия решения
Управление роботом в режиме реального времени требует не только большой скорости ввода изображений, но и высокой скорости его обработки на всех уровнях. Стандартная твердотельная камера позволяет формировать видеоданные со скоростью, определяемой частотой 25 Гц, образуя при этом кадр объемом 0,25 Мб, что дает величину скорости ввода равную 6,25 Мб/с или 12,5 Мб/с для стереопары. Эта скорость определяет требования к обработке данных в стереотелевизионной системе зрения. Использование мощных универсальных вычислительных средств последовательного действия не позволяет с требуемой скоростью обрабатывать одиночные кадры (монокадры) даже простейшими алгоритмами локальной фильтрации с вычислением среднего. В результате, для того чтобы получить обработку видеоданных в реальном времени или с близкой к нему скоростью, алгоритмы должны быть реализованы аппаратно. С этой целью производится разбиение обработки стереоизображений на отдельные этапы, которые реализуются с помощью соответствующих аппаратных средств.
Другой способ уменьшения времени на обработку стереоизображений и получения требуемой информации об окружающей среде состоит в разработке человеко-машинных измерительных систем, например, на основе персонального компьютера. В таких системах нет необходимости обрабатывать все изображение. Оператор выбирает нужный фрагмент или точку, представляющие для него интерес. С помощью метода триангуляции, обычно используемого в машинном стереозрении, измеряются трехмерные координаты указываемых оператором точек на изображении. Благодаря участию оператора процесс обработки изображения локализуется и ограничивается лишь определенной областью внимания. Это существенно уменьшает объем обрабатываемых данных и ускоряет анализ изображения. Оператор воспринимает сцену, наблюдая ее двухмерное изображение на экране дисплея. Для интерпретации расположения объектов сцены в трехмерном пространстве используются координаты измеренных точек, и возможно применение простой геометрической модели объектов внешней среды, построенной по этим точкам. В других человекомашинных измерительных системах оператор наблюдает сцену стереоскопически, используя для этого жидкокристаллические очки.
Одна из таких интеллектуальных человеко-машинных систем предназначена для управления в реальном масштабе времени манипуляционной рукой. Она оснащена видиконными камерами, установленными на конечном звене манипулятора по принципу «глаз в руке». Целью измерений служит определение координат контрольных точек в камерной системе для получения информации о положении захватного устройства по отношению к стыковочному узлу приближающегося объекта.
Для автоматизации операций по очистке от радиоактивных загрязнений используется мобильный комплекс дезактивации, в состав которого входит робот горизонтального перемещения с роботом вертикального перемещения на борту.
Схема комплекса дезактивации приведена на рис. 3.5.
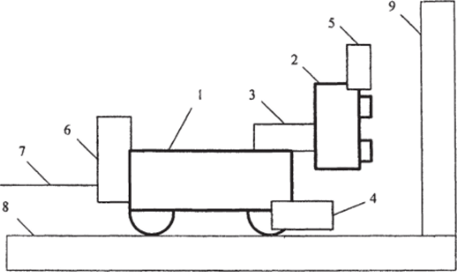
Рис. 3.5. Схема комплекса дезактивации поверхностей:
- 1 — робот горизонтального перемещения, 2 — робот вертикального перемещения, 3 — блок сопряжения роботов вертикального и горизонтального перемещения, 4 — блок горизонтальной очистки.
- 5 — блок вертикальной очистки, 6 — пульт управления,
- 7 — канал управления, 8 — поверхность горизонтальной обработки,
- 9 — поверхность вертикальной обработки
Управление комплексом может осуществляться от единого пульта, в автономном, супервизорном или автоматическом режимах. Пульт управления находится в отдельном помещении на безопасном расстоянии от места выполнения работ роботом в экстремальной среде.
На первом этапе работ производится очистка горизонтальной поверхности с помощью соответствующего технологического оборудования, установленного на роботе горизонтального перемещения. Далее робот горизонтального перемещения, используя блок сопряжения, стыкует робот вертикального перемещения с поверхностями вертикальной обработки. Робот вертикального перемещения осуществляет дезактивацию этих поверхностей сверху вниз. После завершения операции робот вертикального перемещения в автоматическом режиме закрепляется на борту робота горизонтального перемещения, и мобильный комплекс возвращается на исходную позицию.
Для вертикального перемещения робот использует педипуляторы. Педипулятором называется часть мобильного робота, предназначенная для воспроизведения функций опорно-двигательного аппарата человека или животного.
В составе роботов вертикального перемещения педипуляторы, кроме опорно-двигательных функций, должны также выполнять функции фиксации робота на поверхности перемещения.
Из всех известных способов фиксации наиболее универсальным в смысле количества видов поверхностей перемещения, на которых возможна работа робота, является вакуумный способ фиксации с помощью вакуумных захватов (ВЗ).
В общем случае ВЗ можно классифицировать следующим образом:
- • по типу источника вакуума — эжекторные, с вакуумным насосом, термосорбционные и с вентиляторным двигателем,
- • по сложности — простые, с контролем, адаптивные, с аварийной фиксацией, со встроенным технологическим инструментом,
- • по виду рабочей поверхности — однородные, специальные;
- • по типу используемых датчиков — с датчиками наличия поверхности, качества поверхности, степени вакуума, температуры поверхности и проскальзывания.
В общем случае ВЗ имеет структуру, включающую эластичный захват, внутри которого находятся опора сцепления, жестко соединенная с приводом подъема-опускания. Он оснащен датчиком положения, реализующим обратную связь с системой управления робота.