ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ПРИ w0 = const
Скачкообразное возрастание момента от действия сил сопротивления движению (наезд на препятствие на путевой структуре) и последующее восстановление первоначального значения; При возникновении подобных процессов в приводе, когда стадия пуска происходит на реостатных характеристиках, величина Т3 пренебрежимо мала и уравнения (6.35) и (6.36) вырождаются в. Скачкообразное уменьшение момента… Читать ещё >
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ПРИ w0 = const (реферат, курсовая, диплом, контрольная)
При жестких механических связях (с12=оо) в структурной схеме электропривода с линейной механической характеристикой (см. рис. 6.14) частота вращения идеального холостого хода о)0 является обобщенным управляющим воздействием. В этом случае при учете электромагнитной инерции (7 *0) и ненулевых начальных условиях электромеханические переходные процессы описываются системой уравнений (6.24).
Решив второе уравнение этой системы относительно момента М и подставив это выражение в первое, можно получить дифференциальное уравнение системы, решенное относительно частоты вращения:

Аналогично получается дифференциальное уравнение для момента:

Корни обоих уравнений идентичны и при т > 4, что характерно для тяговых приводов, дают экспоненциальную функцию изменения выходного параметра при скачкообразном характере изменения управляющего воздействия, как это было показано выше.
Вместе с тем нельзя обойти вниманием и тот факт, что на работу тягового привода влияют кратковременные возмущающие воздействия, вызванные прохождением неровностей пути. При этом могут возникнуть два характерных варианта:
- • скачкообразное возрастание момента от действия сил сопротивления движению (наезд на препятствие на путевой структуре) и последующее восстановление первоначального значения;
- • скачкообразное уменьшение момента от действия сил сопротивления движению (при потере сцепления колеса с путевой структурой) с последующим его восстановлением.
Отличительная особенность первого варианта в том, что процесс восстановления исходного значения сил сопротивления движению может происходить при незакончившейся реакции привода на первоначальное воздействие. Оба процесса тем не менее описываются экспоненциальными функциями, поскольку уравнения, описывающие их, не претерпевают изменения по сравнению с ранее рассмотренными.
Совершенно другая ситуация возникает во втором случае. Действительно, при потере сцепления колеса с путевой структурой резко уменьшается как момент инерции второй массы в двухмассовой модели привода, что приводит к т = TJTэ < 4, так и почти до нуля момент сопротивления Мс. В этом случае корни обоих уравнений вычисляются так:

Решения уравнений следует искать в виде 
и.

Опуская промежуточные выкладки по определению известными из курса высшей математики способами значений коэффициентов Л, В, С и D приведем решения уравнений в окончательном виде:


На рис. 6.20, а показана естественная механическая характеристика двигателя 1. При работе двигателя в статическом режиме М = Мс нач и (о = шс нач. В момент времени t = 0 нагрузка скачком снижается от Мс иач до Мс. Общий характер процесса при этом определяется отношением m постоянных времени и в качестве примера для m = 1 иллюстрируется зависимостями со, М =/(/), приведенными на рис. 6.24, б.
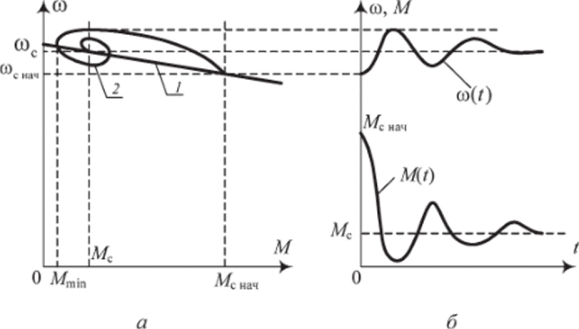
Рис. 6.24. Переходный процесс при изменении нагрузки.
Физические особенности процесса можно проследить, сопоставляя естественную характеристику 1 с построенной с помощью графиков (рис. 6.24, 6) динамической механической характеристикой для рассматриваемого процесса 2 (рис. 6.24, а). При уменьшении скачком момента нагрузки растет частота вращения, вызывающая в свою очередь уменьшение величины тока и момента двигателя. Однако из-за наличия индуктивности рассеяния уменьшение момента двигателя идет медленнее, а частота вращения возрастает в большей степени, чем это определяется статической характеристикой /. Поэтому при снижении момента в первой половине периода до М — Мс частота вращения 0)>0)с, что влечет за собой дальнейшее уменьшение момента до Мт1П. Колебания затухают, и после двух-трех периодов достигается установившийся режим М = Мс и со = a)t.
Максимальное динамическое увеличение скорости Асотах при этом превышает статическое Дсос в тем большей степени, чем больше жесткость статической характеристики и чем больше величина Гэ.
При возникновении подобных процессов в приводе, когда стадия пуска происходит на реостатных характеристиках, величина Т3 пренебрежимо мала и уравнения (6.35) и (6.36) вырождаются в.
и.

Рис. 6.25. Переходный процесс при изменении нагрузки на 1-й реостатной позиции.
Решение этих уравнений для каждой из реостатных позиций имеет вид.

где TMi = Jr/fyj — модуль жесткости /'-й пусковой характеристики.
Кривые переходного процесса для /-й пусковой характеристики показаны на рис. 6.25.
Приведенные кривые отражают экспоненциальный характер переходного процесса, происходящий без колебания системы вокруг точки равновесного состояния.