SCADA-система в структуре автоматизированной системы управления
Контролер более высокого уровня собирает и обрабатывает информацию от контроллеров более низкого уровня. Информация после обработки передается на верхний уровень. Здесь важно отметить, что на верхний уровень передается уже не вся полученная информация, а только необходимая. Например, может осуществляться передача по изменению показаний датчиков и (или) с определенной периодичностью и т. д. Именно… Читать ещё >
SCADA-система в структуре автоматизированной системы управления (реферат, курсовая, диплом, контрольная)
В соответствии с приведенным определением SCADA-система, показанная на рис. 1.3, входит в состав верхнего уровня АСУТП, и ее структура зависит от сложности выполняемой АСУТП задачи. На рис. 1.4 представлена общая структура технического обеспечения системы SCADA Рассмотрим каждый компонент этой общей схемы SCADA-системы.

Рис. 1.4. Структура технического обеспечения системы SCADA.
Автоматические рабочие места (АРМ) операторов служат для отображения информации о части системы, за которую отвечает оператор, и принятия управляющих команд от оператора. Передают принятые команды серверу для занесения в архив и последующей передачи программируемым контроллерам.
Как показано на рис. 1.4, обычно в качестве АРМ выступают ЭВМ. На данный момент здесь все чаще применяются обычные персональные компьютеры, но могут также использоваться специализированные ЭВМ. Программное обеспечение этих ЭВМ должно обеспечивать HMI, т. е. осуществлять связь оператора с объектом управления. Интерфейс принятия команд здесь чаще всего реализован с помощью клавиатуры и мыши, но иногда — посредством сенсорного управления.
Вывод отчетов на печать — там, где это необходимо, АРМ должны предусматривать возможность вывода отчетов, например при организации отдельных АРМ для экспертного (статистического) анализа системы. В случае отсутствия прямой связи с ERP или отсутствия ERP как такового также необходимо АРМ для создания и печати различных отчетов (от ежедневных до годовых).
Отображение общего состояния объекта управления может быть необходимо для корректной оценки текущей ситуации операторами. Здесь применяются различные реализации:
- • дисплей большой диагонали и разрешения;
- • многодисилейные конфигурации, когда общая картина разделена между некоторым количеством дисплеев;
- • специально изготовленная схема системы со световой или какой-либо еще индикацией текущего состояния.
Сервер сбора и хранения данных осуществляет сбор данных от ПЛК и их запись в архив. Обычно архив реализован средствами СУБД (система управления базами данных). Связь с ПЛК может осуществляться как по стандартным для Г1К интерфейсам (Ethernet, RS232), так с помощью специализированных плат расширения или внешних устройств (FEP — Front End Processor). Связь с ERP обычно осуществляется средствами локальной сети, в отдельных случаях могут использоваться глобальные сети.
Резервное копирование и восстановление архива данных необходимо для обеспечения надежности хранения информации. Может быть реализовано различными способами, как на внешние носители, гак и на другие жесткие диски сервера.
Резервирование. Необходимо отметить, что в системе может требоваться горячее резервирование ее компонент. Обычно оно начинается с сервера СУБД, но может затрагивать все компоненты системы.
При построении верхнего уровня АСУТП могут быть задействованы не все компоненты, приведенные на рис. 1.4. В самом простом случае может быть задействован только один ПК, тогда он будет выполнять одновременно роль сервера и АРМ.
SCADA-система предоставляет программное обеспечение для создания и функционирования АРМ, связи с СУБД, создания отчетов и отображения общего состояния объекта управления. По сути, для отображения общего состояния используются те же средства, что и для АРМ, только здесь отображается система в целом и отсутствуют функции управления.
Детализация уровня ПЛК АСУТП зависит от сложности выполняемых задач. Рассмотрим общую схему одного сегмента сети на базе ПЛК, реализующего подсистему АСУТП, показанную на рис. 1.5.
Изучим каждый указанный на схеме сегмента компонент более подробно.
Программируемый логический контроллер нижнего уровня непосредственно подключается к датчикам и исполнительным устройствам. Подключение может быть осуществлено как напрямую, гак и через связующие или преобразующие устройства. Например, для управления частотой вращения.
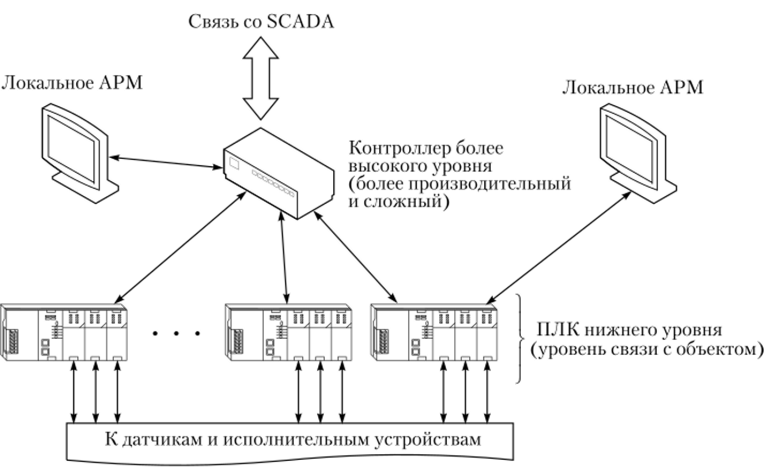
Рис. 15. Общая схема сегмента сети ПЛК мощных электродвигателей необходимо использовать дополнительные схемы усилителей мощности, поскольку выходы контроллера могут быть не рассчитаны на требуемую мощность управления. Другой пример, когда датчики выдают электрический сигнал в диапазоне токов, отличном от диапазона работы входов контроллера, и требуется устройство преобразования. Иногда связующие устройства просто обеспечивают защиту входов/выходов контроллера от нештатных токов и напряжений.
На нижнем уровне обычно используются простые и дешевые контроллеры, целью которых является получение информации от датчиков, преобразование ее в вид, удобный для передачи по цифровому каналу, и обеспечение этой передачи. Для таких контроллеров часто применяется термин RTU — Remote Terminal Unit (удаленный терминал). В настоящее время многие датчики уже снабжены этими функциями и готовы передавать результаты измерения по цифровым каналам, используя стандартные протоколы (например, Modbus). Это достигается за счет использования в этих датчиках микропроцессоров, а сами датчики так и называют — «микропроцессорные». В связи с этим все чаще в АСУТП на этом уровне контроллеры замещаются микропроцессорными датчиками.
Контролер более высокого уровня собирает и обрабатывает информацию от контроллеров более низкого уровня. Информация после обработки передается на верхний уровень. Здесь важно отметить, что на верхний уровень передается уже не вся полученная информация, а только необходимая. Например, может осуществляться передача по изменению показаний датчиков и (или) с определенной периодичностью и т. д. Именно в этом заключается функция обработки информации. Также данный контроллер передает управляющие команды от верхнего уровня, но может сам автоматически вырабатывать управляющие команды, если это предусмотрено в его программе. Например, он может осуществлять автоматическое управление согласно типовым законам регулирования: пропорциональному (П), интегральному (И), пропорционально-интегральному (ИД), пропорционально-дифференциальному (ПД), пропорционалыю-интегралыю-дифференциалыюму (ПИД) или автоматически осуществлять аварийные остановы/отключение оборудования.
Локальные АРМ предназначены для непосредственного управления каким-либо локальным объектом. Обычно они играют роль локального пульта управления. Чаще всего их изготавливают в виде пультов с ламповой или светодиодной индикацией и кнопочным управлением. Но они могут быть представлены и обычными ПК или ПК с сенсорным интерфейсом в пыле-, влагозащищенном корпусе. Особенность этих АРМ в том, что они получают информацию непосредственно с ПЛК, а не из архива, расположенного на сервере. Однако все команды управления с этих АРМ также должны фиксироваться в архиве на верхнем уровне.
На рис. 1.5 представлен сегмент сети ПЛК. Вся сеть целиком может быть более сложной, и вид ее зависит от объекта автоматизации. Сами сегменты могут иметь и более сложную структуру, например, уровней иерархии ПЛК может быть больше двух. Однако следует отметить, что обычно используются простые решения: информация с датчиков (в том числе и с микропроцессорных датчиков) собирается и обрабатывается одним ПЛК и далее передается серверу для занесения в архив.