Инерционное преобразование детерминированного сигнала
Расчет реакции y (t) инерционного ИУ на заданный входной сигнал x (t) является основной задачей динамики ИУ. При решении этой задачи необходимо, зная характеристики входного сигнала x (t) и характеристики ИУ, определить характеристики выходного (преобразованного) сигнала y (t). Для линейных И У существуют строгие методы решения этой задачи. Для нелинейных ИУ точное решение возможно лишь для… Читать ещё >
Инерционное преобразование детерминированного сигнала (реферат, курсовая, диплом, контрольная)
Расчет реакции y (t) инерционного ИУ на заданный входной сигнал x (t) является основной задачей динамики ИУ. При решении этой задачи необходимо, зная характеристики входного сигнала x (t) и характеристики ИУ, определить характеристики выходного (преобразованного) сигнала y (t). Для линейных И У существуют строгие методы решения этой задачи. Для нелинейных ИУ точное решение возможно лишь для ограниченного числа случаев. В этом случае применяют приближенные и численные методы.
В табл. 8.1 показаны наиболее распространенные методы решения этой задачи для линейного ИУ: метод интегрирования дифференциального уравнения, метод интеграла наложения, спектральный метод, метод пространства состояний и операционный метод. Для каждого метода приведена основная расчетная формула. Рассмотрим эти методы.
Таблица 8.1
Методы решения основной задачи динамики ИУ.
Метод. | Формула. |
Интегрирования дифференциального уравнения. | у (0=Уев (О+уЛО |
Интеграл наложения. | t y (t) = J g (i)x (t — z) di 0. |
Спектральный. | y (t)=-^-l W (i (o)Gx((o)eiMdu) |
Пространства состояний. | dy (f) + cx (t) at |
Операционный. | y (t) = L-'{W (p)X (p) + F (p)} |
Метод интегрирования дифференциального уравнения ИУ сводится к решению этого уравнения. Дифференциальное уравнение линейных стационарных ИУ имеет вид (5.1). Если известны параметры ИУ и входной сигнал x (t)f то для определения функции y (t) нужно сначала определить общее решение соответствующего однородного (с нулевой правой частью) дифференциального уравнения yCB(t), а затем найти частное решение уравнения (5.1) yB(t), зависящее от вида правой части этого уравнения.
Сумма найденных решений образует семейство функций времени, содержащих п неизвестных величин, называемых произвольными постоянными. Их значения можно найти из условий, наложенных на значения выходного сигнала y (t) и всех его производных по времени до (гс-1)-го порядка включительно в какой-либо момент времени t = t0 или какие-либо разные моменты времени. Если ?0 = 0, то такие условия называются начальными условиями. Функция времени y (t) = yCB(t) + yB(t), удовлетворяющая этим условиям, описывает реакцию ИУ на заданный входной сигнал, т. е. является решением рассматриваемой задачи.
Метод интеграла наложения сводится к применению формул свертки (5.35), в частности формулы.

г&е g (T) = Lr* {W (р)} — весовая функция ИУ.
При решении задачи спектральным методом используют формулу.

где W (/'со) — комплексная частотная функция И У (5.56); Gx( со) — спектральная плотность входного сигнала, вычисляемая, но формуле (7.45).
При использовании метода пространства состояний дифференциальное уравнение ИУ (5.1) преобразуется в систему п дифференциальных уравнений первого порядка.
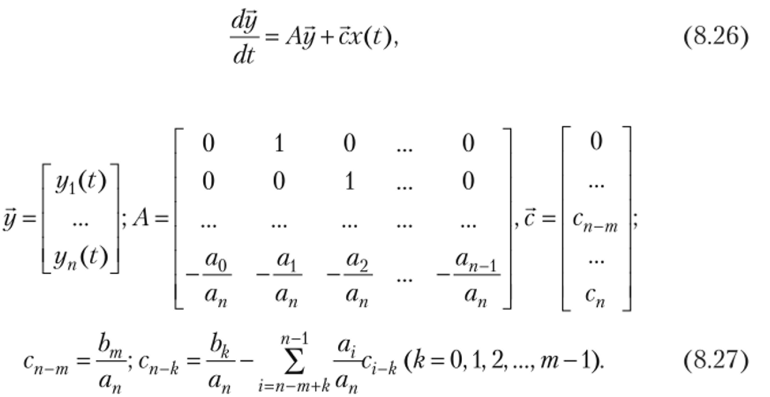
где В этом случае элементы y2(t)f…*yn(t) вектора у образуют про
странство состояний и называются фазовыми координатами. Выходной сигнал И У y (t) совпадает с элементом y (t) этого вектора.
При использовании операционного метода считается, что входной сигнал x (t) имеет изображение (см. приложение 1).

прикладывается к входу ИУ, начиная с момента t = 0, и может иметь конечное число точек разрыва первого рода. На рис. 8.2 показан пример такого сигнала.
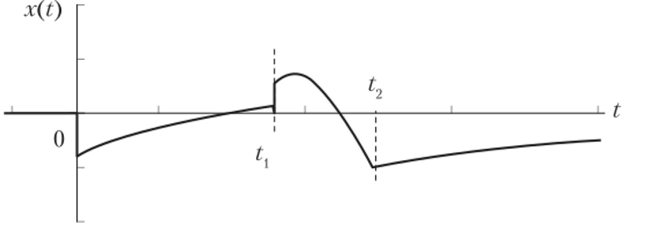
Рис. 8.2. Пример кусочно-непрерывного входного сигнала.
Условие x (t) = 0 при t<0 не сужает рассматриваемую задачу, так как предшествующее действие входного сигнала можно учесть в его начальных значениях лг (О-), х (О-),… х (от1)(0-). Если сигнал прикладывается ко входу И У в момент t = О, то все они равны нулю.
При решении задачи нужно также учитывать начальные условия, которые накладываются на выходной сигнал ИУ и значения всех его производных до (п — 1)-го порядка включительно.
Если они нулевые, то считается, что до момента? = 0 ИУ покоилось. Если, начиная с этого момента, во входном сигнале имеет место скачок (как это показано на рис. 8.2), импульс, или, как принято выше, именно в этот момент происходит «включение» входного сигнала, то нужно различать, что именно описывают (и предписывают) начальные условия: состояние ИУ в момент t = 0— (непосредственно перед скачком), или его состояние в момент t = 0+ (сразу же после скачка).
Если до момента t = 0 ИУ находилось в состоянии покоя, то в качестве начальных условий нужно принять равенства.

В противном случае в качестве начальных условий нужно считать, что.

Если т> 0, т. е. правая часть дифференциального уравнения ИУ (5.1) содержит операции дифференцирования входного сигнала, то значения функции y (t) и ее производных порядка выше (п-т-1) в точке f = 0 + могут не совпадать с их значениями в точке t = 0- [8J.
Решение задачи операционным методом выполняется в следующем порядке. Сначала, зная входной сигнал x (t), определяют его изображение Х (р) (8.28) (см. приложение 1). Затем, зная передаточную функцию ИУ W (p) и учитывая начальные условия, находят изображение выходного сигнала Y (p). Если начальные условия нулевые и сигнал x (t) прикладывается ко входу ИУ в момент t = 0, то это изображение вычисляется по формуле.
 aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
Если хотя бы одно из этих условий не выполняется, то вместо уравнения (8.31) нужно записать другое (расширенное) уравнение Дополнительное слагаемое F (p) вычисляется по формуле где.
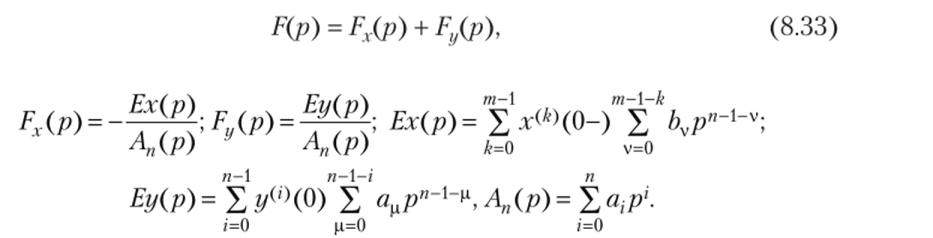
Слагаемое Fx(p) зависит от начальных значений входного сигнала .г^(0-)> k = 0,1,2,т-1, а слагаемое Fy(p) — от начальных условий у (*>(0), i = 0, 1,2,…, п — 1. Если они нулевые, то Fx(p) = 0 и Fy(p) = 0, т. е. F (p) = 0.
В зависимости от порядка т полинома в числителе передаточной функции И У (5.7), формулы для слагаемого Fx(p) приводятся к виду:
- • если т = О, то Fx(p) = 0;
- 1
- • если т = 1, то Fx(p) =—{^(О-)};
АХр).
• если т = 2, то Fx(p) = —-j— {/>]Х (0-) + b2[px (0-) + х (0-)]};
Р)
• если т = 3, то.

и т.д. Аналогично для слагаемого F"(p) можно записать:
- 1
- • если п = 1, то Fy(p) = —— {а, г/(0)};
ЛпР)
- 1
- • если п = 2, то Fy(p) = ——{a{y (0)+a2[py (0) + y (0)]};
ЛПР)
• если п- 3, то.

После этого решение задачи сводится к определению оригинала найденного изображения по формуле.

Описанная схема решения задачи показана на рис. 8.3.
Рис. 83. Схема решения основной задачи динамики ИУ операционным методом.
В соответствии с этой схемой для решения задачи нужна передаточная функция ИУ W (p). Ее можно определить, зная любую полную динамическую характеристику ИУ (см. табл. 5.2).
Определение изображения Х (р) и оригинала y (t) можно выполнять с помощью таблиц преобразования Лапласа (см. приложение 1, табл. 1), что упрощает решение задачи.
Таким образом, в общем случае реакция линейного стационарного инерционного ИУ y (t) на входной сигнал x (t) содержит три слагаемых.

где — оригиналы соответствующих изображений.

Слагаемое fwx(t) называется вынужденной составляющей выходного сигнала, слагаемое /v0(O — свободной х-составляющей, а слагаемое / 0(t) — свободной «/-составляющей. Если сигнал x (t) прикладывается ко входу ИУ в момент t = 0 и начальные условия нулевые, то составляющие /хо (О и fyo (t) отсутствуют.
Покажем пример решения рассматриваемой задачи.
Пример 8.1.
Пусть на вход ИУ с передаточной функцией.
в момент? = 0 поступает сигнал x (t) = (t + l)3e" (*+1). Требуется определить выходной сигнал ИУ, соответствующий заданным начальным условиям i/(0) = у0, y (0) = v0, y (0) = ze>0.
Решение
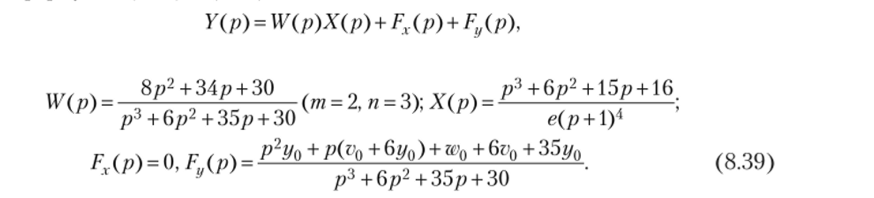
В частности, для случая у0 = 1, v0 = -2, w0 = 2 получим По формулам (8.32) и (8.33) находим где.

На рис. 8.4 построены графики входного сигнала x = x (t) (кривая 1) и соответствующего выходного сигнала y (t) = Lrl{Y (p)} (кривая 2).
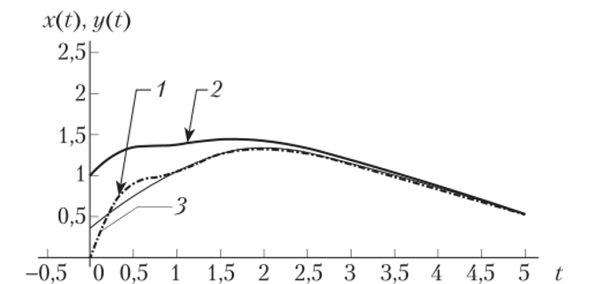
Рис. 8.4. К примеру решения основной задачи динамики ИУ операционным методом.
Используя теорему о предельных значениях (см. приложение 1, формулу (12)), можно найти 
т.е. при t = О имеют место скачки скорости и ускорения. Это связано с наличием операций дифференцирования входного сигнала в правой части дифференциального уравнения рассматриваемого ИУ.
Штрихпунктирной кривой 3 показано решение, соответствующее нулевым начальным условиям г/0 = 0, v0 = 0, ге0 = 0.
В работе [28] рассмотрены особенности расчета реакции линейного стационарного ИУ на непрерывный, импульсный, периодический и кусочнолинейный сигналы.