Преобразование уравнений линейных систем в нормальную форму
Приравнивая коэффициенты при одинаковых производных в правых частях этого уравнения и исходного уравнения (1.2), находим. Требуется преобразовать это уравнение в нормальную форму. Решение. Запишем исходное уравнение в обычной форме: В общем случае уравнение одномерной линейной управляемой системы (объекта) имеет вид. Т = 0. В этом случае, разрешив уравнение (1.2) относительно старшей производной… Читать ещё >
Преобразование уравнений линейных систем в нормальную форму (реферат, курсовая, диплом, контрольная)
В общем случае уравнение одномерной линейной управляемой системы (объекта) имеет вид.

Рассмотрим отдельно два случая: т = 0 и т = п.
А) т = 0. В этом случае, разрешив уравнение (1.2) относительно старшей производной, получим.

Положив у = XI, у = Х2у …, ^ у ^ = хп, получим.
 aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
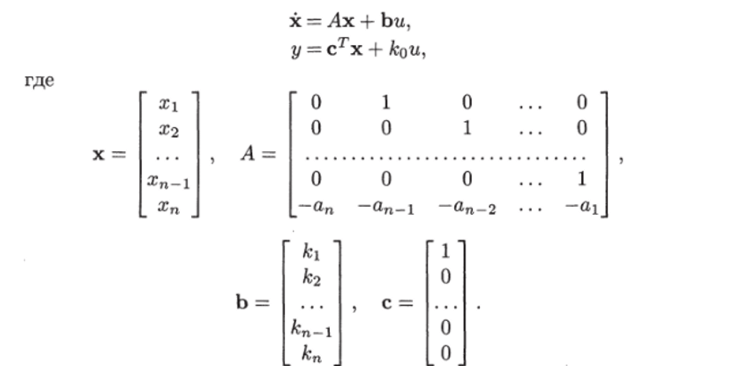
В векторной форме эта система принимает вид где где Б) т = п. В этом случае уравнение (1.2) можно преобразовать к виду.
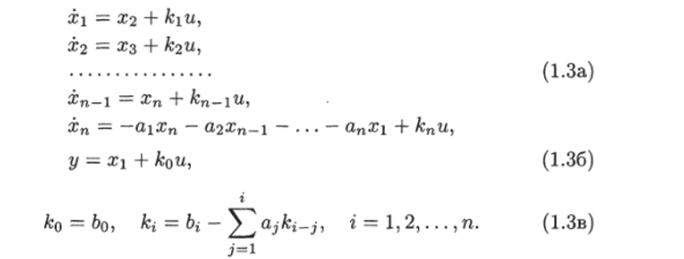
В векторной форме эта система принимает вид.
Докажем справедливость приведенных преобразований. Продифференцируем обе части соотношения (1.36) последовательно п раз, подставляя вместо производной х" ее выражение из (1.3а). Тогда получим.
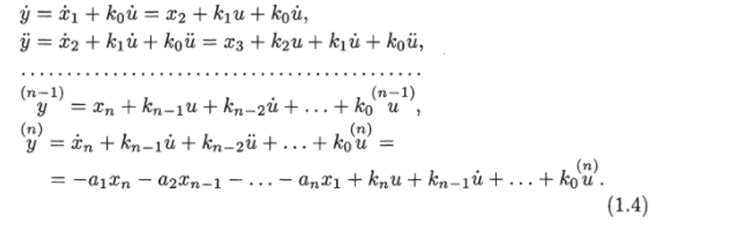
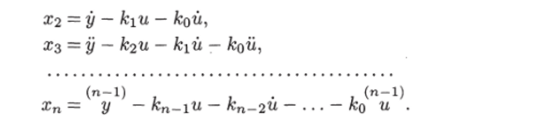
Теперь выразим из полученной системы уравнений и уравнения (1.36) переменные xi, X2,…, xn через переменную у и ее производные. Из (1.36) получаем.

Далее из полученной выше системы уравнений находим.
Подставим полученные выражения для Х, Х2, • • • >хп в уравнение (1.4). Тогда получим.

Перенесем слагаемые, содержащие переменную у и ее производные, в левую часть, и в правой части произведем приведение подобных членов. Тогда получим.

Приравнивая коэффициенты при одинаковых производных в правых частях этого уравнения и исходного уравнения (1.2), находим.

Очевидно, эти равенства можно записать в виде.

или 
Последнее рекуррентное соотношение совпадает с (1.3в).
Способ преобразования, который рассмотрен в этом пункте, можно использовать и тогда, когда т удовлетворяет неравенству О < т < п, так как уравнение (1.2) при т < п является частным случаем, когда первые т — п коэффициентов в правой части равны нулю.
Пример 1.1. Пусть управляемая система описывается уравнением 
Требуется преобразовать это уравнение в нормальную форму. Решение. Запишем исходное уравнение в обычной форме:

Разделим обе части на 0,01. Тогда получим.

В данном случае коэффициенты уравнения равны.

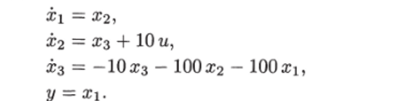
По формуле (1.3в) найдем коэффициенты ki (г = 0,1,2,3):

В соответствии с формулами (1.3а) и (1.36) уравнения в нормальной форме имеют вид