Децентрализация по входу
Для того чтобы можно было синтезировать локальные регуляторы для каждой подсистемы отдельно, нужно произвести децентрализацию по управлению (входу). Рассмотрим порядок децентрализации по входу линейной системы, которая в общем случае описывается уравнением Если декомпозиция не произведена и уравнение (7.26) представляет собой одну систему, то к нему нужно применить преобразование Луенбергера… Читать ещё >
Децентрализация по входу (реферат, курсовая, диплом, контрольная)
Пусть система после декомпозиции описывается уравнением.

В данном случае подсистема S* (к = 1,2,…, г) зависит не от локального векторного управления и^к а от вектора управления всей системы. В таких случаях говорят, что система управления является системой централизованного управления. В системе, которая описывается уравнением (7.23), подсистема S* (к = 1,2,…, г) зависит только от локального векторного управления и*. Такие системы называют системами децентрализованного управления.

Для того чтобы можно было синтезировать локальные регуляторы для каждой подсистемы отдельно, нужно произвести децентрализацию по управлению (входу). Рассмотрим порядок децентрализации по входу линейной системы, которая в общем случае описывается уравнением Если декомпозиция не произведена и уравнение (7.26) представляет собой одну систему, то к нему нужно применить преобразование Луенбергера: представить п в виде суммы I целых чисел п* I
(п = ^2 пк) и применить к нему преобразование (7.25). Затем проfc=i.
извести декомпозицию, включая в подсистему только те уравнения, которые содержат компоненты локального управления этой подсистемы и, быть может, уравнения, не содержащие управление. Последние с точки зрения децентрализации могут быть включены в любую подсистему.
где Ak — (Пк х п*)-матрица, Ац — (п* х п^)-матрица, Вк — (пк х /) — матрица, то преобразование Луенбергера можно применить каждой подсистеме в отдельности. В этом случае, представив размерность п* n-й подсистемы в виде суммы I целых чисел п** (г = 1,2,…,/), для мятпииы ппепбпялгтяния JTvPHftenrpina пгтлгея/"м (см. /7.2М1.
Если система состоит из подсистем и задается уравнениями.


где — г-й столбец матрицы В к. После преобразования Луенбергера каждой подсистемы, нужно произвести перегруппировку уравнений так, чтобы в каждую подсистему были включены только те уравнения, которые содержат компоненты локального управления соответствующей подсистемы.
Пример 7.3. Система описывается уравнением  состоящая из двух подсистем.
состоящая из двух подсистем.
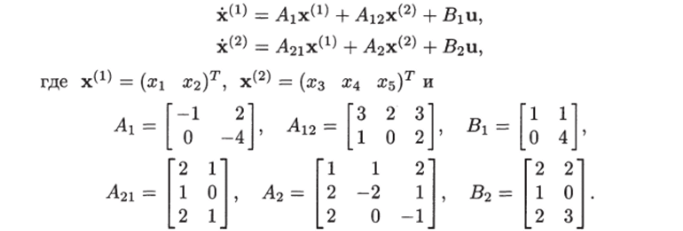
Требуется произвести децентрализацию.
Решение. Произведем преобразование Луенбергера каждой подсистемы. Так как размерность первой подсистемы совпадает с размерностью вектора управления, то Пц = п2 = 1 и матрица Т преобразования Луенбергера х^1) = T^ для нее совпадает с матрицей В (см. (7.28)):

Размерность второй подсистемы равна П2 = 3. Положим П21 = 2 и П22 = 1. Тогда матрица Т2 преобразования Луенбергера =.

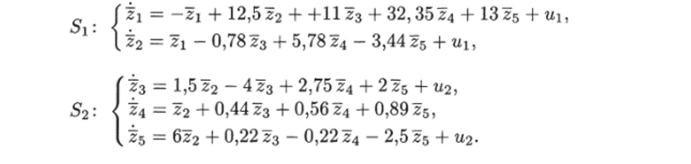
Для упорядочения переменных произведем еще одно преобразование: 
Тогда уравнения подсистем примут вид.