Измеритель усилия натяжения йен и ротора ИНЦР
Принцип работы измерителя заключается в преобразовании углового перемещения вала ротора в унитарный код — в последовательность импульсов, число которых пропорционально угловому перемещению вала, с последующим его преобразованием модулем 002 в параллельный двоичный код, пропорциональный частоте вращения вала ротора. На датчик ДМР-2 на осях 9, 10 устанавливается шаблон. Колесо датчика должно… Читать ещё >
Измеритель усилия натяжения йен и ротора ИНЦР (реферат, курсовая, диплом, контрольная)
Измеритель ИНЦР предназначен для измерения косвенным методом величины момента на роторе.
Технические данные ИНЦР приведены в табл. 5.12.
Структурная схема ИНЦР представлена на рис. 5.22.
Канал измерения натяжения цепи ротора состоит из датчика натяжения цепи ротора ДМР-2, тензометрического преобразователя ПНЦ и преобразователя аналог-код (плата 008).
Таблица 5.12.
Наименование параметра. | Значение. |
Верхний предел измерений величины момента на роторе, кНм, не более. | |
Верхний предел преобразования давления цепи ротора на колесо, кИ, не более. | |
11риведенная основная погрешность измерения, %. | |
Тип цепи привода ротора. | 2ПР-50,8. |
Масса датчика ДМР-2, кг, не более. | |
Габаритные размеры ДМР-2, мм, не более. | 615×405×190. |
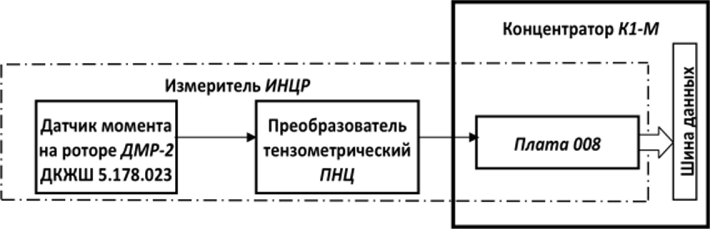
Рис. 5.22. Структурная схема ИНЦР
Принцип работы измерителя заключается в преобразовании датчиком ДМР-2 усилия натяжения цепи ротора в деформацию упругого элемента (тензорезисторного моста), которое преобразуется преобразователем ПНЦ в сигнал постоянного тока.
Плата 008 формирует гальванически развязанное от других источников питание преобразователя ПНЦ и преобразует аналоговый сигнал, пропорциональный усилию натяжения цепи ротора, в параллельный двоичный код.
Внешний вид ДМР-2 представлен на рис. 5.23.
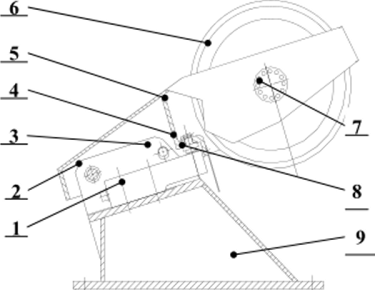
Рис. 5.23. Внешний вид ДМР-2:
1 — тензорезисторный датчик; 2 — ось; 3 — ось; 4 — опора; 5 -рычаг; 6 — колесо; 7 — ось; 8 — опора; 9 — основание
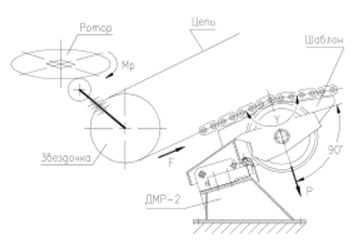
Рис. 5.24. Схема кинематическая установки ДМР-2:
Мр — момент на роторе; F — сила натяжения цепи; Р — сила давления цепи на колесо; Y-угол охвата колеса цепью
Измеритель ДМР-2 откалиброван для ротора Р-700 с цепной звездочкой, имеющей 21 зуб. Установка ДМР-2 в соответствии со схемой, приведенной на рис. 5.24, обеспечивает нормированное давление цепи ротора Р = 24,5 кН на колесо ДМР-2 при моменте на роторе МР = 60 кН.
ДМР-2 состоит из тензорезисторного датчика 1 (рис. 5.23), закрепленного на основании 9-ю болтами.
Рычаг 5 соединен с основанием 9 шарнирно осью 2. Ось 3, установленная на рычаге 5, проходит через отверстия в основании 9 и ограничивает взаимное перемещение между рычагом и основанием.
На рычаге 5 на подшипниках установление колесо 6. Наружные кольца подшипников запрессованы в отверстие колеса, внутренние кольца подшипников расположены на оси 7 с гарантированным зазором для удобства монтажа.
На рычаге 5 установлена опора 4, которая опирается на опору 8, установленную на датчике 1.
Нагрузка от цепи ротора воспринимается колесом 6 и через опоры 4 и 8 передается на тензорезисторный датчик, изменяя его сопротивление.
Расчет силы натяжения цепи ротора F и момента на роторе Мр проводится по формулам: 
где и — передаточное число ротора; к — КПД ротора; D — делительный диаметр звездочки, который определяется по формуле:

где / - шаг цепи; z — число зубьев звездочки.
Ниже приведен пример расчета угла охвата колеса цепью Y для Р = 24,5 кН и Мр = 60 кН м:
Y= 180° - 2arcsin (0,102 / - и • к! sin (180° / г)). (5.8).
На датчик ДМР-2 на осях 9, 10 устанавливается шаблон. Колесо датчика должно располагается посередине цепи ротора. Угол охвата цепью колеса датчика определяется по шаблону, при этом пальцы цепи (при натянутой цепи) параллельны кромкам шаблона, что обеспечивает угол охвата Y= 170°.
Несущая конструкция для установки ДМР-2 должна выдерживать длительную нагрузку 50 кН.
Измеритель температуры бурового раствора ИТБР
ИТБР предназначен для измерения температуры бурового раствора.
Техническая характеристика ИТБР приведена в табл. 5.13.
Таблица 5.13.
Техническая характеристика ИТБР
Наименование параметра. | Значение. |
Верхний предел измерения температуры, °С. | |
Напряжение питания, В, не более. | 36 ± 1. |
Время преобразования, с, не более. | |
Основная приведенная погрешность, %, не более. | 1,5. |
Структурная схема ИТБР представлена на рис. 5.25.
Канал измерения температуры БР состоит из ДТ и модуля 043, расположенного в концентраторе Kl-M (К1-М).
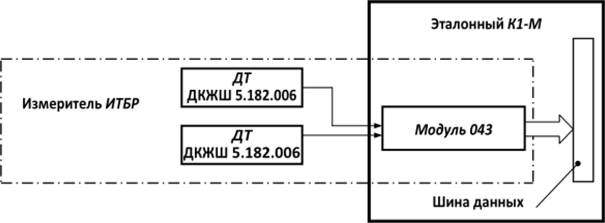
Рис. 5.25. Структурная схема ИТБР.
Модуль 043 формирует гальванически развязанное от других источников питание для ДТ и преобразует аналоговый сигнал, пропорциональный температуре, в параллельный двоичный код.
Измеритель частоты вращения ротора ИЧВР
Измеритель ИЧВР предназначен для преобразования углового перемещения вала ротора в параллельный двоичный код частоты его вращения.
Техническая характеристика ИЧВР приведена в табл. 5.14. Структурная схема ИЧВР представлена на рис. 5.26.
Таблица 5.14.
Канал измерения частоты вращения вала ротора состоит из ДО и модуля 002, расположенного в «корзине» корпуса концентраторе К1-М.
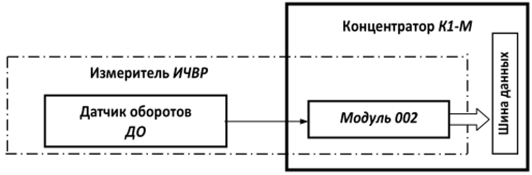
Рис. 5.26. Структурная схема ИЧВР.
Технические характеристики ИЧВР
Наименование параметра. | Значение. |
Верхний предел измерений частоты вращения ротора, об/мин, нс более. | |
Приведенная основная погрешность, %, не более. | 1,0. |
Принцип работы измерителя заключается в преобразовании углового перемещения вала ротора в унитарный код — в последовательность импульсов, число которых пропорционально угловому перемещению вала, с последующим его преобразованием модулем 002 в параллельный двоичный код, пропорциональный частоте вращения вала ротора.