Колебания упругих систем с несколькими степенями свободы
Для нахождения коэффициентов уравнения частот воспользуемся правилами определения перемещений в статически неопределимых системах, сформулированными в параграфе 14.5. Выберем для состояний 1 и 2 статически опрсделимые основные системы так, чтобы «перемножение» эпюр было как можно проще. Вспомогательные состояния 1 и 2 в статически определимых системах и соответствующие им эпюры му и М показаны… Читать ещё >
Колебания упругих систем с несколькими степенями свободы (реферат, курсовая, диплом, контрольная)
Свободные колебания
Как отмечалось выше, реальные сооружения обладают распределенной массой и поэтому имеют бесконечное число степеней свободы. При проведении инженерных расчетов распределенные массы, как правило, приводятся к сосредоточенным. Число сосредоточенных масс и, следовательно, число степеней свободы зависит от вида конструкции и от требуемой степени точности расчета.
Далее будем рассматривать свободные и вынужденные колебания без учета диссипативных сил и на основе ранее принятых допущений.
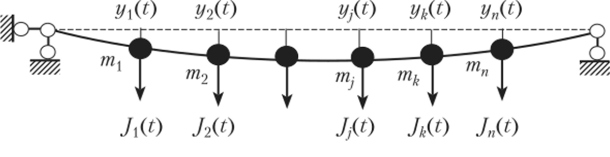
Рис. 15.17.
Рассмотрим невесомую балку с п сосредоточенными массами (рис. 15.17). При принятых допущениях данная система будет иметь п степеней свободы. Если балку вывести из состояния равновесия, она будет совершать свободные колебания. В процессе свободных незатухающих колебаний на массы будут действовать только силы инерции J (t), которые и определяют деформированный вид балки.
Тогда, применяя принцип независимости действия сил, перемещение любой массы mk можно представить как сумму перемещений.

где 8kj — коэффициент податливости, т. е. перемещение k-н массы от действия единичной силы, приложенной в точке, где расположена j-я масса.
Выражения (15.35) составляют для каждой массы расчетной схемы при k = 1, 2, /?. Входящие в выражение (15.35) инерционные силы, как известно, определяются выражениями вида.

Подставив выражение (15.36) в формулу (15.35) и перенеся все члены влево, получим.

При k = 1, 2,…, п выражения (15.37) представляют собой систему однородных дифференциальных уравнений, описывающих колебания расчетной схемы с п степенями свободы. Для такой системы возможны п частот свободных колебаний, которым будут соответствовать п возможных форм колебаний. Совокупность частот данной системы принято называть спектром частот. В пределах каждой из форм колебаний все точки будут колебаться с частотой со.
В соответствии с этим для любой k-й массы ее перемещение будет иметь вид:

где ак — амплитуда колебаний k-й массы.
Дважды продифференцируем по времени выражение (15.38): 
Подставим выражения перемещений масс y (t) и их вторые производные в систему уравнений (15.37). Нетрудно заметить, что каждое слагаемое в каждом из уравнений системы (15.37) содержит общий множитель sinco/, на который можно сократить все члены этой системы. После сокращения получим.

или, разделив все члены на со2,.

Выражение (15.39) при k = 1, 2, п является системой линейных однородных уравнений относительно амплитуд ак колебаний масс. В эту систему кроме п неизвестных амплитуд входит неизвестная величина 1 / со2.
Как видно из выражения (15.39), если массы системы колеблются с одной и той же общей для всех частотой со, форма колебаний, определяемая амплитудами масс, не зависит от времени, т. е. для каждого момента отношение перемещений масс к перемещению любой из них является величиной постоянной.
Такие колебания, при которых все точки системы с п степенями свободы колеблются с одинаковой частотой, а форма колебаний при этом не зависит от времени, называются главными колебаниями, а их формы колебаний — главными формами.
Известно, что однородные системы уравнений (без свободных членов) имеют два решения. Одно из них является тривиальным, когда все амплитуды ак = 0. Это решение не представляет интереса, так как является случаем отсутствия колебаний. Отличные от нуля значения амплитуд возможны тогда, когда определитель, составленный из коэффициентов при неизвестных системы уравнений (15.39), равен нулю, т. е.
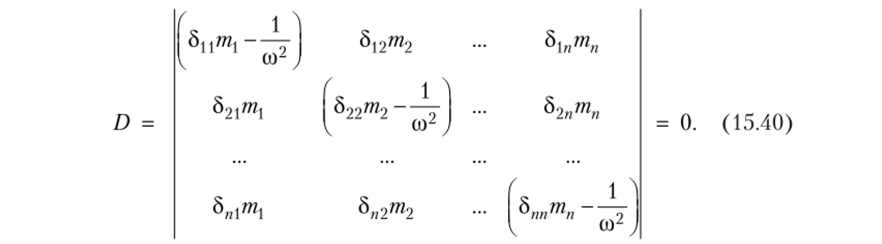
Если определитель раскрыть, то получим алгебраическое уравнение п-й степени относительно параметра 1 / со2. Уравнение в форме (15.40) или в развернутой форме носит название уравнения частот. Впервые оно было получено в астрономии, поэтому в литературе получило название векового уравнения.
Решив уравнение (15.40), найдем п значений частот свободных колебаний со.
Для практических целей часто бывает достаточно определить низшую (наименьшую) частоту свободных колебаний, представляющую наибольшую опасность в смысле возникновения резонанса при действии вибрационной нагрузки. Это объясняется следующим. Во-первых, резонанс на низшей частоте приводит к наибольшему динамическому коэффициенту. Во-вторых, если даже частота возмущающей силы значительно превышает низшую частоту свободных колебаний, то резонанс на этой частоте все же может возникнуть при разгоне машины или при ее запуске. Поэтому низшую частоту иногда называют частотой основного тона колебаний. Следующий по порядку тон колебаний называется первым обертоном и т. д.
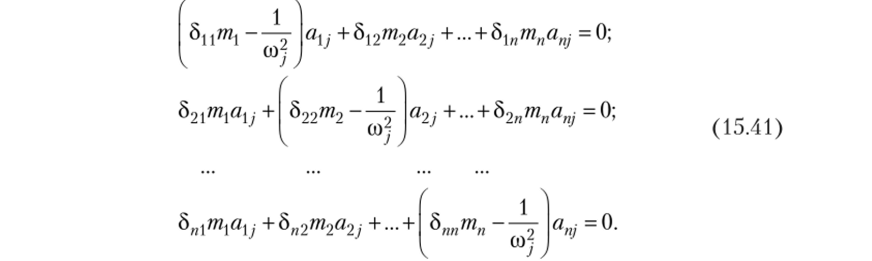
Определив частоты свободных колебаний, можно для каждой частоты на основании (15.39) определить формы колебаний.
Запишем систему уравнений (15.39) для любой определенной из решения уравнения (15.40) частоты со;:
Система уравнений (15.41) может быть превращена в неоднородную, если все ее члены разделить на одну из амплитуд или задать ей значение, равное единице, что-то же самое. В результате в одном из уравнений системы (15.41) появится свободный член, и, решая систему из (п — 1) уравнений, мы определим величины других амплитуд по отношению к выбранной. Полученные значения обычно называют относительными амплитудами.
Систему уравнений (15.41) при определении значений относительных амплитуд можно преобразовывать как угодно. Это не отразится на соотношениях между амплитудами. Аналогичные математические преобразования можно производить и с уравнением частот (15.40). Один из вариантов этих преобразований покажем в примере, приведенном ниже.
Определитель (15.40) можно представить в матричной форме.

где Е — единичная матрица; В — матрица коэффициентов определителя (15.40) в действительном или преобразованном виде; А, — корень векового уравнения, содержащий величину 1 / со2.
С математической точки зрения решение уравнения (15.42) есть нахождение собственных чисел и собственных векторов матрицы В. Собственные числа представляют собой корни векового уравнения, а собственные вектора представляют относительные амплитуды, соответствующие каждому корню.
При правильном решении векового уравнения должны выполняться следующие проверки:
1) определитель матрицы В должен равняться произведению собственных чисел, т. е.

2) след матрицы (сумма главных коэффициентов) должен равняться сумме собственных чисел, т. е. 5^, В = XЬи = Е А,-.
Пример 15.8.
Требуется определить частоты и построить формы свободных колебаний для консольной балки с ломаной осью, показанной на рис. 15.18, а.
Решение. 1. Степень свободы масс Wm = 2. Две сосредоточенные массы расчетной схемы могут совершать колебания по двум направлениям (рис. 15.18, 6).
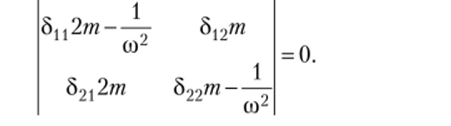
2. Уравнение частот при Wm = 2 для данной расчетной схемы имеет вид.
- 3. Для определения коэффициентов уравнения частот последовательно приложим единичные силы по направлению колебаний масс (состояния 1 и 2 на рис. 15.18, в, г) и построим эпюры М, и М2.
- 4. Определим кооймЬипиенты упявнения частот по интегпялv Максвелла — Мора:


5. Подставим найденные коэффициенты в уравнение частот и решим:
Для начала упростим полученную запись уравнения частот, умножив все его члены на 2EI / 9т и введя обозначение X = 2El / 9wco.
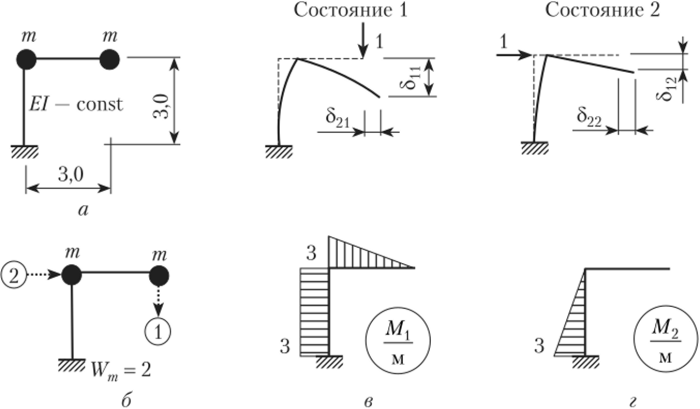
Рис. 15.18.
В результате получим уравнение частот в преобразованном виде:
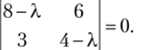
Раскрыв определитель, получим квадратное уравнение относительно параметра X: (8 — X) • (4 — X) — 3 • б = 0, или X — 2Х + 14 = О, откуда Х] = А.тах = 10,69; Х2= 1,31.
6. Выполним проверки полученного решения.
Матрица коэффициентов уравнения частот имеет вид.
Первая проверка:
Л (В) = 8−4-3−6 = 14;
ГП, =10,69−1,31 = 14,0039,.
следовательно, D (B) = FIXI с погрешностью 0,0028%, что вполне допустимо. Вторая проверка:
^ В = ?&,= 8 + 4 = 12;
2Х = ю, б9 + 1,31,.
следовательно, Sp В =? Л,-.
- 1
- 7. Определяем частоты свободных колебаний. На основании принятого ранее обозначения круговая частота свободных колебаний определяется из выражения со, =y]2EI Тогда частота основного тона будет

а частота первого обертона.

- 8. Выполним построение форм колебаний на основании преобразованной системы уравнений (15.41), которая в данной задаче имеет вид
- (8 — Xj)vu + 6и2, = О,
Зи, + (4 -Х,)о2| = 0,.
где Ujj и и2, — относительные амплитуды масс при /-той частоте.
Для построения форм колебаний зададим одной из амплитуд значение, равное единице, тогда вторую амплитуду найдем из любого уравнения приведенной системы.
- 1- я форма колебаний. Х{ = А.тах = 10,69. Тогда первое уравнение системы запишем в виде (8 — Х{)ии + 6о21 = 0, откуда при ои = 1 вторая относительная амплитуда о21 = 0,448.
- 2- я форма колебаний. Х2 = 1,31. Тогда первое уравнение системы запишем в виде (8 — А,2)о12 + 6и22 = 0, откуда при о12= 1 вторая относительная амплитуда и22 = -1,116.
Деформированные состояния расчетной схемы, соответствующие формам колебаний, приведены на рис. 15.19 с указанием найденных значений относительных амплитуд. 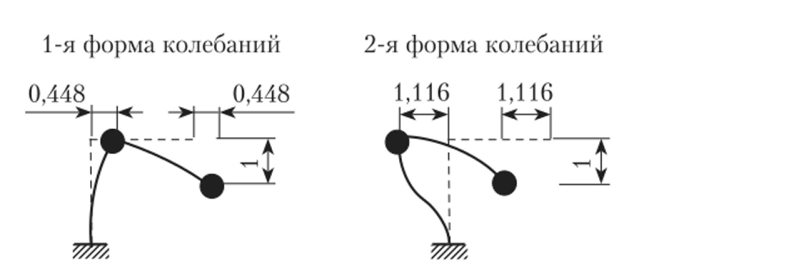
Рис. 15.19
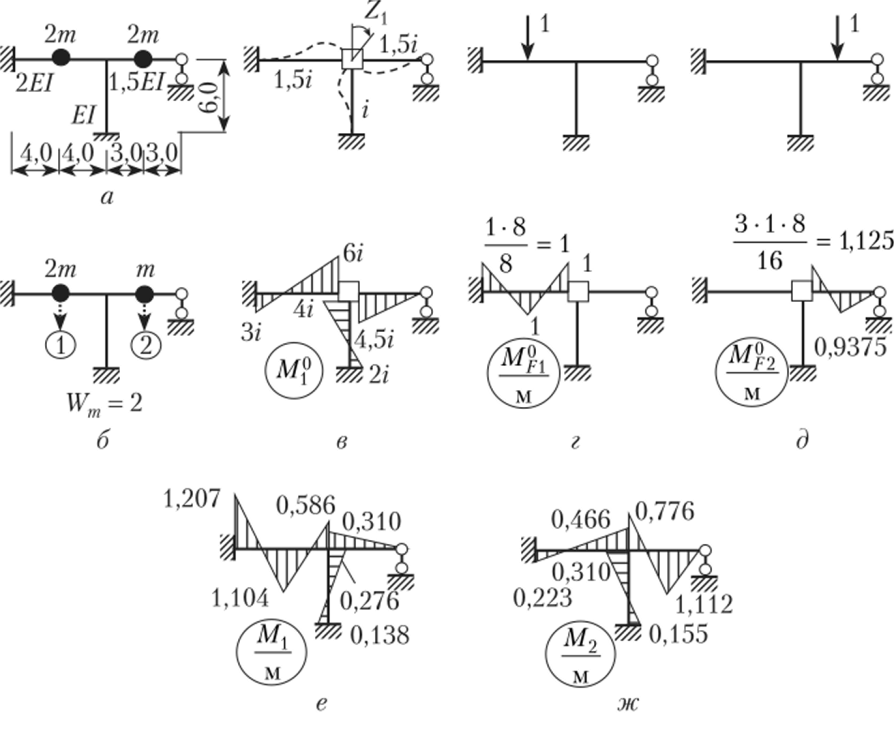
3. Для определения коэффициентов уравнения частот последовательно приложим единичные силы по направлению колебаний масс (состояния 1 и 2 на рис. 15.20, г, д).
Рис. 15.20
Основная система Состояние 1 Состояние 2
Так как заданная схема статически неопределима, расчет по обоим состояниям производим методом перемещений (пк = 1 < пс = 4).
Относительные жесткости стержней рамы:
- — стойки ц = EI / 6 = /;
- — левого ригеля /2 = 2EI / 8 = 1,5/';
- — правого ригеля i3 = 1 , 5Е1 / 6 = 1,5/.
Основная система метода перемещений и эпюра Мj° от принудительного поворота дополнительной связи на единичный угол показаны на рис. 15.20, в.
Каноническое уравнение метода rnZj) + г}р = 0, где j — порядковый номер загружения.
Коэффициент при неизвестном, определенный по А/[ гп = 14,5/.
4. Расчет по состоянию 1.
Эпюра грузового состояния показана на рис. 15.20, г, откуда свободный член канонического уравнения г^р =1 м.
Из решения канонического уравнения Z^ = -г{Р / ги = -1/14,5/.
Эпюра изгибающих моментов состояния 1, построенная на основании принципа независимости действия сил + M^t, показана на рис. 15.20, е.
5. Расчет по состоянию 2.
Эпюра грузового состояния М^2 показана на рис. 15.20, д, откуда свободный член канонического уравнения r/jr =-1,125 м.
Из решения канонического уравнения Z2) =-r/jr / Гц =1,125 /14,5/.
Эпюра изгибающих моментов состояния 2, построенная на основании принципа независимости действия сил как М2 = A/1°Z1(2) + М^2" показана на рис. 15.20, ж.
6. Для нахождения коэффициентов уравнения частот воспользуемся правилами определения перемещений в статически неопределимых системах, сформулированными в параграфе 14.5. Выберем для состояний 1 и 2 статически опрсделимые основные системы так, чтобы «перемножение» эпюр было как можно проще. Вспомогательные состояния 1 и 2 в статически определимых системах и соответствующие им эпюры му и М показаны на рис. 15.21, а, б.
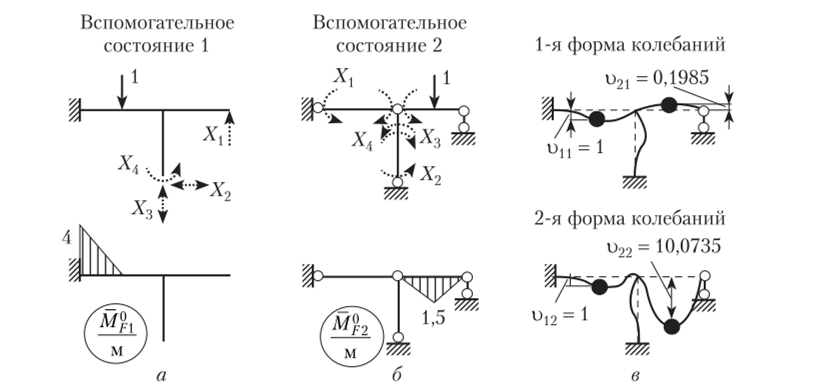
Рис. 15.21.
Коэффициенты уравнения частот определим по интегралу Максвелла — Мора:
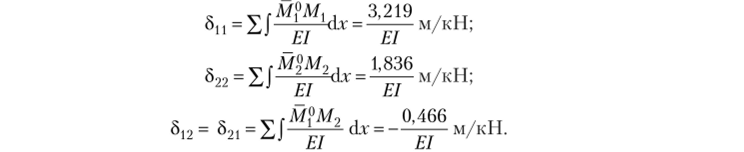
7. Подставим найденные коэффициенты в уравнение частот и решим его.

Для начала упростим полученную запись уравнения частот, умножив все члены уравнения на EI / 0,466 т и введя обозначение Х = El / 0,466то>2.
В результате получим уравнение частот в преобразованном виде:

Раскрыв определитель, получим квадратное уравнение относительно параметра X: (13,815 — X) • (3,94 — X) — 2 = 0 или X2 -17,555А. + 52,431 = О, откуда Л| = Хюах = 14,0135; Х2 = 3,7415.
8. Выполним проверки полученного решения.
Матрица коэффициентов уравнения частот имеет вид.

Первая проверка:
D (B) = 13,815−3,94−2-1 = 52,4311;
rUi = 14,0135−3,7415 = 52,4315.
Следовательно, D (B)~ ПЛ, с погрешностью 0,003%, что вполне допустимо. Вторая проверка:
SpB = Е^ = 13,815 + 3,94 = 17,755;
ЕЛ, =14,0135 + 3,7415 = 17,755, следовательно, 5/;В = Е Л,.
9. Определяем частоты свободных колебаний. На основании принятого ранее обозначения круговая частота свободных колебаний определяется из выражения (О, = yjEI / (0,466mXj). Тогда частота основного тона.

а частота первого обертона.

- 10. Выполним построение форм колебаний на основании преобразованной системы уравнений (15.41), которая в данной задаче имеет вид
- (13,815 — Л,)о1; — и2/= 0,
- -Зин + (3,940 «Л,)и2/ = 0,
где Oj, и о2< — относительные амплитуды масс при i-й частоте.
Для построения форм колебаний зададим одной из амплитуд значение, равное единице. Тогда вторую амплитуду найдем из любого уравнения приведенной системы.
1- я форма колебаний: Х] = Лтах = 14,0135. Тогда первое уравнение рассматриваемой системы будет иметь вид (13,815 — - и21 = 0, откуда при ои = 1 вторая относительная амплитуда o2i = _0,1985,.
2- я форма колебаний: Л2 = 3,7415. Тогда первое уравнение рассматриваемой системы будет иметь вид (13,815 — Л2)о12 — о22 = 0, откуда при и12= 1 вторая относительная амплитуда о22 = 10,0735.
Деформированные состояния расчетной схемы, соответствующие формам колебаний, приведены па рис. 15.21, в с указанием найденных значений относительных амплитуд.
- [1] Требуется определить частоты и построить формы свободных колебаний для статически неопределимой рамы с двумя сосредоточенными массами, показаннойна рис. 15.20, а. Решение.
- [2] Степень свободы масс Wm = 2. Обе сосредоточенные массы расчетной схемымогут совершать колебания только по вертикали (рис. 15.20, б).
- [3] Уравнение частот при Wm = 2 для данной расчетной схемы имеет вид