Разработка и моделирование асинхронного электропривода со скалярным управлением для шнекового питателя
Основными элементами регулируемого асинхронного электропривода с частотным скалярным управлением являются: М — асинхронный двигатель; ПЧ — преобразователь частоты; ПКП, ПКО — прямой и обратный координатные преобразователи; ПЧН — преобразователь «частота — напряжение»; ЗИ — задатчик интенсивности; ДТА, ДТС — датчики тока двигателя; Элемент сравнения допустимого максимального и фактического… Читать ещё >
Разработка и моделирование асинхронного электропривода со скалярным управлением для шнекового питателя (реферат, курсовая, диплом, контрольная)
Разработка и моделирование асинхронного электропривода со скалярным управлением для шнекового питателя Казаков Евгений Петрович Для механизмов, работающих в небольшом диапазоне регулирования скорости и не требующих высокого качества переходных процессов, наиболее часто применяются асинхронные двигатели с короткозамкнутым ротором, получающие питание от преобразователей частоты со скалярной системой управления. К таким механизмам можно отнести: насосы, вентиляторы, конвейеры и другие, общепромышленные и вспомогательные механизмы технологических комплексов.
Скалярное управление основывается на изменении частоты и питающего двигатель напряжения по определенному закону, где n может быть как больше, так и меньше 1, если используется закон постоянства мощности. Вид зависимости определяется определенным характером нагрузки механизма. За независимое воздействие принимается частота, которая определяет скорость вращения двигателя, а значение напряжения при данной частоте определяет поток двигателя и в конечном итоге механическую характеристику, значения моментов двигателя [1].
Функциональная схема электропривода ПЧ — АД, реализующая законы управления класса, приведена на рис. 1.

Рис. 1. Функциональная схема скалярной системы ПЧ — АД
Основными элементами регулируемого асинхронного электропривода с частотным скалярным управлением являются: М — асинхронный двигатель; ПЧ — преобразователь частоты; ПКП, ПКО — прямой и обратный координатные преобразователи; ПЧН — преобразователь «частота — напряжение»; ЗИ — задатчик интенсивности; ДТА, ДТС — датчики тока двигателя; Элемент сравнения допустимого максимального и фактического значения действующего фазного тока двигателя; РОТ — регулятор ограничения тока.
Статические механические характеристики скалярного асинхронного электропривода с автономным инвертором напряжения В работе проведены исследования асинхронного электропривода шнекового питателя. Расчет механической характеристики проводился для асинхронного двигателя серии RA90S4. Параметры схемы замещения асинхронного двигателя определены в соответствии с методикой, изложенной в [2].
Естественная механическая характеристика асинхронного двигателя:

Естественная механическая характеристика, рассчитана и построена по формуле — (1), в среде Mathcad, (рис. 2).
асинхронный электропривод шнековый питатель.
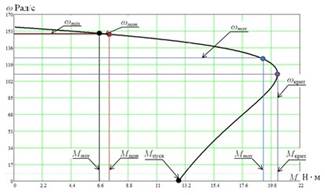
Рис. 2. Естественная механическая характеристика
Динамические характеристики скалярного асинхронного электропривода с автономным инвертором напряжения Для исследования качества переходных процессов при пуске и регулировании скорости двигателя в системе «преобразователь частоты — асинхронный двигатель» в программной среде MATLAB (Simulink) была составлена имитационная модель электропривода, схема силовых цепей которого приведена на рис. 3.
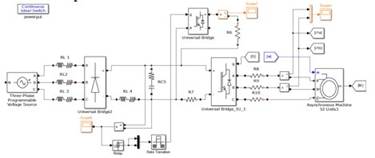
Рис. 3. Схема силовых цепей имитационной модели скалярного асинхронного электропривода с частотным регулированием скорости
Переходные процессы пуска скалярного асинхронного электропривода шнекового питателя от задатчика интенсивности с последующим плавным увеличением нагрузки по мере заполнения бункера представлены на рис. 4.
Анализ графиков статических механических характеристик рис. 2 и графиков переходных процессов рис. 4 показывает, что учет основных параметров электропривода выполнен, верно, а результаты имитационного моделирования электропривода в программной среде MATLAB (Simulink) совпадают в контрольных точках со статическими характеристиками, рассчитанными в MathCAD, с погрешностью определяемой шагом интегрирования.
Повышение критического момента асинхронного электропривода В случае синусоидальной системе ШИМ амплитудные и действующие фазные значения первой гармоники выходного напряжения инвертора при частоте выходного напряжения 50 Гц:
На практике простейшим способом повышения критического момента асинхронного электропривода при его разработке является введение в сигнал управления инвертором третьей гармоники. Напряжение каждой фазы при номинальной частоте, в этом случае, увеличивается с В до В, а третья гармоника напряжения момента не создает [3].
Естественная механическая характеристика асинхронного двигателя с учетом третьей гармоники.

Механическая характеристика, рассчитана и построена, по формуле (4), в среде Mathcad, (рис. 5).
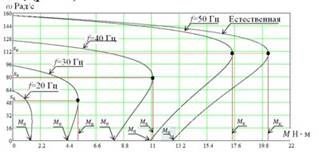
Рис. 5. Семейство механических характеристик при законе регулирования U/f2= const
Графики переходных процессов пуска асинхронного электропривода на частоту Гц с коррекцией вольт — частотной характеристики приведен на рис. 6.

Рис. 6. Графики переходного процесса
Анализ графиков переходных процессов рис. 6 показывает, что электропривод разгоняется до угловой скорости, определяемой частотой преобразователя Гц, установившееся значение тока статора не превышает номинального значения. Установившиеся значения скорости и момента совпадают со значениями на статических характеристиках (рис. 6) с погрешностью, определяемой шагом интегрирования.
Результаты расчета статических и динамических режимов работы асинхронного электропривода со скалярным управлением, а также экспериментальные исследования позволяют сделать следующие выводы:
- 1. Учет активных и индуктивных сопротивлений преобразователя и питающей сети имеет определяющее значение при расчете с малой погрешностью как статических, так и переходных режимов скалярных асинхронных частотно-регулируемых электроприводов.
- 2. Коррекция вольт — частотной характеристики преобразователя частоты с ШИМ модуляцией при учете активных и индуктивных сопротивлений преобразователя позволяет получить более достоверные результаты имитационного моделирования и ускорить процесс настройки реальных электроприводов.
Библиографический список.
- 1. Каверин С. В., Каверина И. А. Амплитудно-частотное управление асинхронным двигателем. Тольятти: Издательство Воронежского университета, 2012. С. 185 — 192.
- 2. Чернышев А. Ю., Чернышев И. А. Определение параметров схемы замещения асинхронного двигателя по каталожным данным. Томск: Изд-во Томского политехнического университета, 2007. С. 269 — 272.
- 3. Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург: УРО РАН, 2000. 654 с.