Проект работ МОВ ОГТ 3D
Кратность наблюдений является важнейшим технико-экономическим параметром проектируемых работ. Величина кратности наблюдений контролирует на итоговом временном разрезе отношение сигнал / помеха: чем выше кратность, тем выше динамическая выразительность временного разреза. Чрезмерное увеличение кратности или уменьшение размеров бина непременно приводит к резкому удорожанию полевых работ. Поиск… Читать ещё >
Проект работ МОВ ОГТ 3D (реферат, курсовая, диплом, контрольная)
Кратность наблюдений является важнейшим технико-экономическим параметром проектируемых работ. Величина кратности наблюдений контролирует на итоговом временном разрезе отношение сигнал / помеха: чем выше кратность, тем выше динамическая выразительность временного разреза. Чрезмерное увеличение кратности или уменьшение размеров бина непременно приводит к резкому удорожанию полевых работ. Поиск разумного компромисса в этом вопросе — главная задача этапа проектирования сейсморазведочных работ.
Практика проведения сейсморазведочных работ 3D свидетельствует о том, что в большинстве случаев для предварительной оценки величины возможной кратности работ можно руководствоваться следующим простым соотношением: Fold3D = (0.5 — 1.0)Fold2D, где — Fold2D — кратность профильных сейсморазведочных работ по технологии 2D хорошего качества в изучаемом или соседнем районе.
Профильные работы в Хатангском заливе с хорошим качеством записи имели кратность 120, то есть кратность площадных работ должна быть в диапазоне 60−120, для получения хорошего качества материала и удовлетворительной стоимости полевых работ оптимальной кратностью является 80.
Для обеспечения необходимой глубинности исследований проектируемой съемкой 3D важно выполнение еще одного условия: система наблюдений должна обеспечивать получение неискаженных записей сейсмических трасс от наиболее глубоко залегающих целевых сейсмических горизонтов.
Это будет возможным, если размеры регистрирующей расстановки будут таковы, что размер Хмах максимального удаления «источник — приемник» будет определенным образом согласовываться с изучаемыми глубинами залегания этих горизонтов. Расстояние Хмах, с одной стороны, должно быть возможно большим, чтобы обеспечить уверенное проведение скоростного анализа до целевых горизонтов. С другой стороны, это расстояние должно быть таким, чтобы исключалась возможность регистрации либо головных волн, либо закритических отраженных волн. Конечно, полученные на чрезмерно больших удалениях трассы можно просто проигнорировать в процессе обработки. Однако это ведет к неоправданным временным и финансовым затратам. Поэтому принято считать, что приемлемые проектные решения получаются в том случае, если максимальное расстояние Хмах и наибольшая глубина залегания целевого горизонта Zueли связаны следующим соотношением: Хмах = (0.8 — 1.2)Zцели. [5].
По результатам работ прошлых лет перспективными нефтегазовыми отложениями на Нордвикской зоне поднятий Хатангского залива являются отложения нижней перми глубиной залегания до 4000 м. Под данный целевой горизонт и были подобраны параметры системы наблюдения 3Д.
Обзорная схема Хатангского залива моря Лаптевых приведена на рисунке 28, где представлены возможные площади работ для исследований по методике МОВ ОГТ 3D, параметры которой приведены в таблице 5.
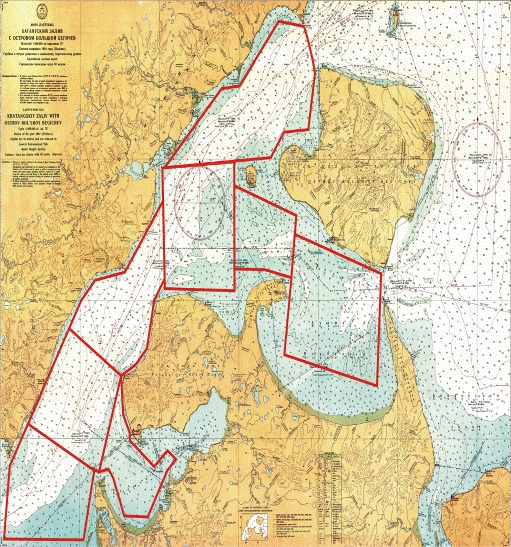
Рисунок 28 — Расположение проектных площадок исследований.
Таблица 5 — Проектные параметры морских сейсморазведочных работ.
Проектные параметры методики работ. | Величина параметров. |
1. Вид работ. | МОВ ОГТ 3D. |
Система расположения взрывных и приемных профилей. | взаимно-перпендикулярная, «прямой крест». |
2. Основные параметры. | |
система наблюдений. | центральная, симметричная. |
номинальная кратность (в зоне полнократного накопления). | |
по оси Х (вдоль ЛПВ). | |
по оси Y (вдоль ЛПП). | |
максимальное удаление «взрыв-прием», м (Хмах). | |
минимальное удаление «взрыв-прием», м (Хмин). | |
соотношение полуосей шаблона (характеристика А). | 0.87. |
размер бина, м. | 25 Ч 25. |
размер полуосей единичной расстановки, м. | 2975 Ч 3425. |
3. Геометрия линий приема в шаблоне. | |
количество ЛПП в полосе. | |
интервал между ЛПП, м. | |
количество ПП на ЛПП. | |
количество активных каналов в шаблоне. | |
шаг ПП на ЛПП, м. | |
4. Геометрия линий возбуждения в шаблоне. | |
количество ЛПВ. | |
интервал между ЛПВ, м. | |
количество ПВ на линии. | |
шаг ПВ на ЛПВ, м. | |
5. Параметры перемещения шаблона. | |
перемещение шаблона вдоль полосы в количестве интервалов между ЛПВ. | |
перемещение шаблона на смежную полосу в количестве интервалов между ЛПП. | |
6. Параметры регистрации. | |
шаг дискретизации, с. | 0.002. |
длина записи, с. | |
формат записи. | SEG-D, SEG-Y. |
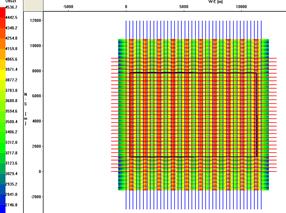
Схема проектных профилей линий пунктов приема (ЛПП) и линий пунктов взрыва (ЛПВ) представлена на рисунке 29.
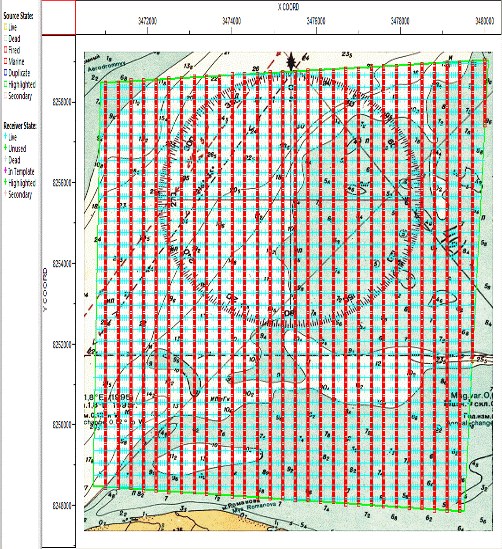
Рисунок 29 — Схема проектных профилей линий пунктов приема (ЛПП) и линий пунктов взрыва (ЛПВ).
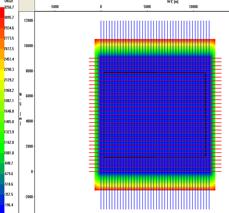
Распределение номинальной кратности на площади исследований приводится на рисунке 30.
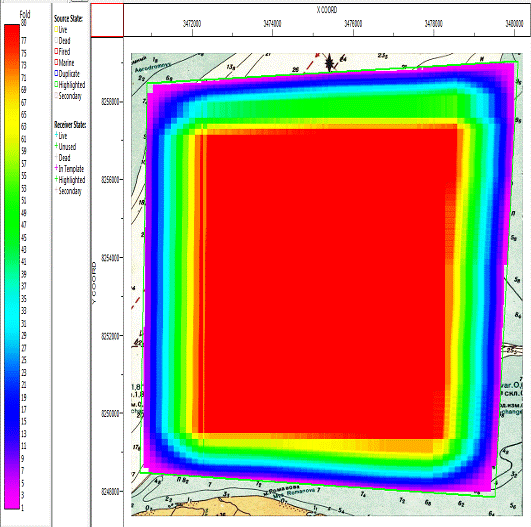
Рисунок 30 — Распределение номинальной кратности на площади исследований.
В связи с тем, что параметры системы наблюдения 3D на всех площадях однотипны, то и атрибуты для всех площадей съемок, которые представлены на нижеследующих рисунках, будут идентичны вне зависимости от размера площади (рис. 31−34).
а б.
Рисунок 31 Распределение ближних (а) и дальних (б) удалений

а б.
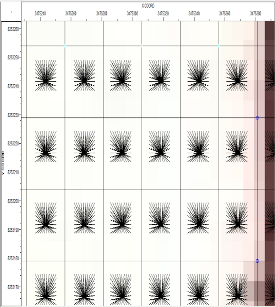
Рисунок 32 Распределение удалений (а) и азимутов (б) в бине
а б.
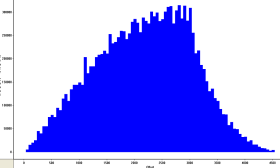
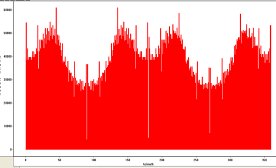
Рисунок 33 Гистограммы распределения удалений (а) и азимутов (б)
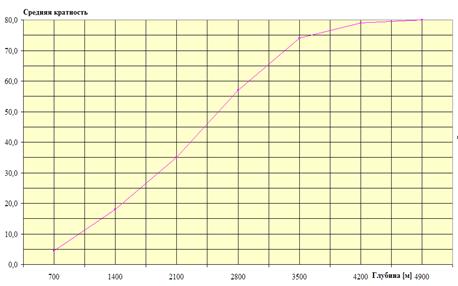
Рисунок 34 Распределение средней кратности прослеживания отражающих границ в зависимости от глубины их залегания.