Понятие о системе линейно-угловых ходов

Б3 — из третьего хода, и вычисляют средневесовое значение из трех, причем за вес отдельного значения принимают число 1 / ni, где ni — количество углов в ходе от исходного направления до узлового направления (на рис. 2.20 n1 = 4, n2 = 3, n3 = 5): По приращениям координат вычисляют координаты узловой точки по каждому ходу в отдельности и получают три значения координаты X и три значения координаты… Читать ещё >
Понятие о системе линейно-угловых ходов (реферат, курсовая, диплом, контрольная)
Совокупность линейно-угловых ходов, имеющих общие точки, называют системой ходов; узловой точкой называется точка, в которой сходятся не менее трех ходов. Как и для отдельного линейно — углового хода, для системы ходов применяют строгую и упрощенную обработку измерений; упрощенную обработку рассмотрим на примере системы из трех линейно-угловых ходов с одной узловой точкой (рис. 2.23). Каждый ход опирается на исходный пункт с известными координатами; на каждом исходном пункте имеется направление с известным дирекционным углом.
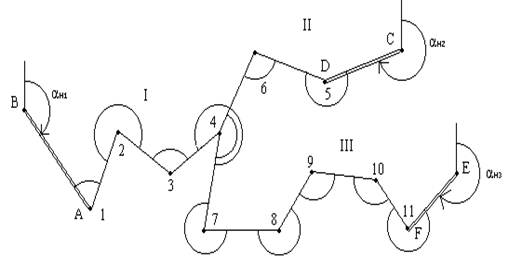
Рис. 2.23. Система линейно-угловых ходов с одной узловой точкой.
Одну сторону какого-либо хода, проходящую через узловую точку, принимают за узловое направление (например, сторону 4 — 7) и вычисляют ее дирекционный угол по каждому ходу в отдельности, начиная от начального дирекционного угла в ходе. Получают три значения дирекционного угла узлового направления:
б1 — из первого хода,.
б2 — из второго хода,.
б3 — из третьего хода, и вычисляют средневесовое значение из трех, причем за вес отдельного значения принимают число 1 / ni, где ni — количество углов в ходе от исходного направления до узлового направления (на рис. 2.20 n1 = 4, n2 = 3, n3 = 5):
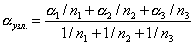
(2.94).
Считая узловое направление исходным, то-есть, имеющим известный дирекционный угол, вычисляют угловые невязки в каждом ходе по отдельности и вводят поправки в измеренные углы. По исправленным углам вычисляют дирекционные углы всех сторон каждого хода и затем — приращения координат по всем сторонам ходов.
По приращениям координат вычисляют координаты узловой точки по каждому ходу в отдельности и получают три значения координаты X и три значения координаты Y узловой точки.
Средне-весовые значения координат подсчитывают по формулам:
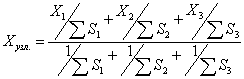
(2.95),.
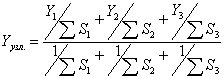
(2.96).
Считая узловую точку исходным пунктом с известными координатами, вычисляют координатные невязки для каждого хода в отдельности и вводят поправки в приращения координат по сторонам ходов. По исправленным приращениям координат вычисляют координаты пунктов всех ходов.
Если сказать кратко, то упрощенная обработка системы линейно — угловых ходов с одной узловой точкой состоит из двух этапов: получение дирекционного угла узлового направления и координат узловой точки и обработка каждого хода в отдельности.