Разработка структурной схемы устройства управления
В качестве интерфейса связи с компьютером в данном проекте выбран интерфейс UART. Данный интерфейс был выбран не случайно, потому что для передачи данных используется Bluetooth модуль, который в свою очередь использует интерфейс UART. Так же его плюсом является хорошая скорость передачи данных — 9600 Кбит/с. Диаметр монтажных отверстий, диаметры выводов микросхем колеблются в пределах 0,8…1,2 мм… Читать ещё >
Разработка структурной схемы устройства управления (реферат, курсовая, диплом, контрольная)
Структурная схема системы С помощью программного обеспечения установленного на телефоне формируются и передаются сигналы на устройство приемник, в данном случае это Bluetooth модуль.
Bluetooth модуль в свою очередь принимает сигналы, и не обрабатывая передает их на главный управляющий элемент — микроконтроллер.
Получая информацию, микроконтроллер обрабатывает ее и формирует управляющие сигналы для драйвера управления. А через драйвер управления подается напряжение на двигатели постоянного тока для их работы.
Разработка микропроцессорного устройства управления двигателями постоянного тока
В данном разделе осуществляется разработка схемы электрической принципиальной — выбор двигателей, микроконтроллера, интерфейса связи. Расчет схемы электрической принципиальной и осуществляется разработка печатной платы и сборочного чертежа.
Разработка схемы электрической принципиальной Выбор двигателя В качестве объекта управления в данной работе были выбраны двигатели, установленные в машине на радиоуправлении, приобретенной специально для выполнения работы.
Выбор микроконтроллера В качестве основного элемента получения и обработки сигналов был выбран микроконтроллер Atmega8 фирмы Atmel (см. приложение Б). У микроконтроллера имеются порты UART, 3 таймера, что необходимо для данной работы.
Цифровые сигнальные процессоры фирмы Atmel получили широкое применение, так как они имеют доступную цену и достаточный набор периферии.
Выбор микросхемы и интерфейса связи Для управления двигателями стоял выбор между драйверами L298N и L293D. Но выбор остановился на драйвере L298N. Он работает в более широком диапазоне напряжений, и в связи с этим отпадает риск перегрева микросхемы. Так же он легкодоступный и имеет полный ряд функций необходимых для выполнения данной работы.
В качестве интерфейса связи с компьютером в данном проекте выбран интерфейс UART. Данный интерфейс был выбран не случайно, потому что для передачи данных используется Bluetooth модуль, который в свою очередь использует интерфейс UART. Так же его плюсом является хорошая скорость передачи данных — 9600 Кбит/с.
Расчет механической мощности.
Вес модели равен 0,7 кг, максимальная скорость 1 м/с при диаметре колес 30 мм.
Рассчитаем ускорение:
м/c.
Вращающий момент рассчитывается следующим образом:
Cm=Jб При моменте инерции и угловом ускорении б =.


мН*м Для расчета максимальной мощности двигателя используется частота вращения двигателя, выражаемая в оборотах в минуту:

об/мин Мощность двигателя пропорциональна вращающему моменту и частоте вращения:
Pm = Cm*V.

Pm=Вт.
Расчет схемы электрической принципиальной Выбор силового драйвера управления.
В данной работе мы используем драйвер L298N со следующими характеристиками:
Максимальное рабочее напряжение: Uпит < Uдрайвера=46 В;
Напряжение питания Uпит=+5 В, +3,3 В;
Максимальный выходной ток (на один канал): Iпит < Iдрайвера=2 А:
Расчет резисторов.
Вывод Reset микроконтроллера, согласно технической документации, рекомендовано подключать к питанию через подтягивающий резистор номиналом 10 кОм.
Резисторы для соединения микроконтроллера и Bluetooth модуля устанавливаются исходя из технической документации модуля: рабочее напряжение 3.3 В, при работе с напряжением 5 В установить резисторы номиналом 4,7 кОм.
Для стабильной работы и избежание сгорания светодиода необходимо, что бы ток текущей в цепи, соответствовал номинальному (10 или 20 миллиампер), для этого установим резистор сопротивлением 1 кОм.
Расчет конденсаторов.
Для стабилизации напряжения поступающего с источника питания были параллельно подключены конденсаторы емкостью 30 мкФ и 100 мкФ.
Уже известно, что Bluetooth модуль работает от напряжения 3,3 В, получается рабочее напряжение в микросхеме 5 В будет излишним, что может привести к сгоранию модуля. Поэтому для уменьшения напряжения необходимо подключить стабилизатор L78L33. Исходя из его технической документации потребуются 2 конденсатора емкостью 0,33 мкФ и 0,1 мкФ. Схема соединения представлена на рисунке.
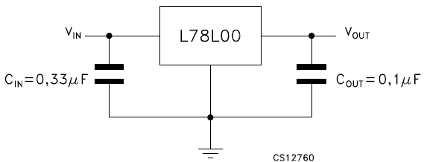
Схема соединения стабилизатора L78L33.
Разработка печатной платы Разработка конструкции устройства осуществляется на основе разработанной принципиальной электрической схемы с учетом требований к ремонтопригодности, требований технической эстетики, с учетом условий эксплуатации и других требований.
При конструировании печатной платы необходимо учитывать следующее.
Если нет каких-либо ограничений, печатная плата (ПП) должна быть квадратной или прямоугольной. Максимальный размер любой из сторон не должен превышать 520 мм. Толщина ПП должна соответствовать одному из чисел ряда: 0.8; 1.0; 1.5; 2.0 в зависимости от площади ПП.
Центры отверстий должны располагаться в узлах координатной сетки. Каждое монтажное и переходное отверстие должно быть охвачено контактной площадкой.
Диаметр монтажных отверстий, диаметры выводов микросхем колеблются в пределах 0,8…1,2 мм, а диаметры выводов резисторов колеблются около 0,66 мм. Для упрощения процесса изготовления, монтажные отверстия на плате имеют диаметр 0,8 и 1,2 мм. Шаг координатной сетки составляет 1,27 мм.
Паять элементы припоем ПОС-61. Материал платы стеклотекстолит фольгированный СТЭФ 2−1,5−50 по ГОСТ 10 316–86.
Для smd-элементов рекомендуется печатный монтаж, согласно datasheet.
Разработка сборочного чертежа В ходе разработки сборочного чертежа необходимо уделить внимание следующим требованиям:
- 1) разработка сборочного чертежа устройства управления двигателями постоянного тока осуществляется на основе разработанной принципиальной электрической схемы с учетом требований к чертежным документам;
- 2) в соответствии со схемой деления изделия на составные части присвоить обозначение сборочной единице и ее элементам по ГОСТ 2.201−68;
- 3) проставить необходимые размеры согласно требованиям ГОСТ 2.109−73;
- 4) заполнить спецификацию, выдерживая все требования ГОСТ 2.108−68;
- 5) заполнить основную надпись и выполнить другие необходимые надписи (технические требования и пр.).