Исследование модернизированного ботводробителя БД-4М с шарнирными ножами
Во время работы режущий элемент ротора под действием центробежной силы располагается радиально. В момент встречи с картофельной ботвой он со стороны ботвы получает внешний импульсивный момент среза, под действием которого режущий элемент начинает отклоняться от радиального положения, достигаем максимального угла отклонения, после этого двигается в обратную сторону. Для этого составим… Читать ещё >
Исследование модернизированного ботводробителя БД-4М с шарнирными ножами (реферат, курсовая, диплом, контрольная)
В общем комплексе механизированных работ при возделывании картофеля уборка картофеля является одной из главных операций. От качества уборки, полноты сбора урожая во многом зависит эффективность возделывания картофеля в хозяйстве. При уборке картофеля картофелеуборочными машинами и комбайнами производительность их в значительной степени зависит от состояния картофельной ботвы. При сильно развитой и полеглой ботве производительность уборочных машин резко падает из-за забивания рабочих органов, а в отдельных случаях их работа вообще не возможна. Поэтому для облегчения работы картофелеуборочных машин картофельную ботву перед уборкой необходимо удалять. Но процесс уборки ботвы весьма трудоемкий, включающий ряд операций, таких как срез, сгребание и транспортировку, каждая из которых выполняется отдельной машиной. Появление в конце 50…60 годов отечественных машин роторного типа, таких как КИР-1,5, УБД-3, БД-4 дало возможность механизировать процесс уборки картофельной ботвы. Но в процессе эксплуатации замечено, что роторные машины обладают рядом недостатков, вызванных несовершенством конструкции ротора, его кинематических режимов, недостаточной уравновешенностью и рядом других. Поэтому исследования, направленные на совершенствование конструкции машин роторного типа, представляются весьма важными. Для достижения поставленной цели проведены теоретические и экспериментальные исследования, лабораторно-полевые испытания модернизированного 4-х рядного ботводробителя. При выполнении теоретических исследований использованы методы математического анализа, элементы классической механики, при выполнении экспериментальной части исследования в лабораторно-полевых условиях применены современные методы. Модернизированный ботводробитель БД-4 прошел хозяйственные испытания в ООО «Авангард» Рязанского района Ключевые слова: КАРТОФЕЛЬНЫЙ БОТВОДРОБИТЕЛЬ, РОТОР ПЕРЕМЕННОГО ДИАМЕТРА, ШАРНИРНЫЕ НОЖИ, ЛАБОРАТОРНО-ПОЛЕВЫЕ ИСПЫТАНИЯ Для улучшения работы картофелеуборочной техники на полях с развитой ботвой необходимо предварительно удалять картофельную ботву.
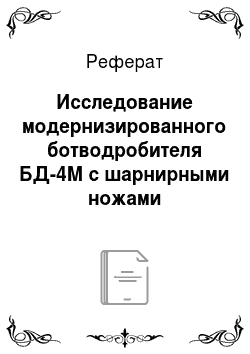
Мы предлагаем модернизированный ботводробитель БД-4М, с переменным диаметром (Рис. 1) .
1 — привод; 2 — кожух; 3 — ротор с шарнирными ножами; 4 -шарнирный нож; 5 — опорное колесо; 6 — навесное устройство.
Рисунок 1 — Схема четырехрядного ботводробителя.
Такая конструкция обеспечивает копирование картофельных грядок, дробление ботвы в междурядьях и дает возможность максимального удаления ботвы и растительных остатков и сброса измельченной ботвы в междурядье.
С целью согласованной работы вращающегося ротора и колеблющихся ножей рассмотрим динамику шарнирных элементов в поле центробежных сил И на основе этого определим параметры ножей и ротора. Схема ротора представлена на Рис 2.

Рисунок 2 — Схема ротора с режущими шарнирными ножами.
Для этого составим дифференциальное уравнение движения системы по методу Лагранжа, состоящей из ротора и режущего элемента. Выберем неподвижную систему координат ХОУ, проходящую через центр вращения ротора и подвижную систему координат Х1ОУ1, вращающуюся вместе с ротором и проходящую через центр вращения ротора и ось подвеса режущего элемента.
Примем за обобщенные координаты системы углы отклонения ц и б, где ц — угол отклонения ротора от вертикали, б — угол отклонения режущего элемента от равновесного положения. Тогда лагранжевы дифференциальные уравнения, которым должны удовлетворять обобщенные координаты как функции времени, могут быть записаны в общем виде:

(2).
где — кинетическая энергия системы;
и — обобщенные силы;
и — обобщенные координаты.
Определив кинетическую энергию Т нашей системы, причем представив эту энергию как функцию углов поворота ц и б и их производных и произведя вычисление составляющих уравнений (1) и (2) получим дифференциальное уравнение второго порядка:

(3).
где JB — момент инерции ножа относительно подвеса;
mмасса ножа;
сс— расстояние от точки подвеса ножа до его центра масс;
Rрадиус барабана;
щб— угловая скорость барабана;
Рср— сила среза, действующая на нож;
l— длина ножа.
Во время работы режущий элемент ротора под действием центробежной силы располагается радиально. В момент встречи с картофельной ботвой он со стороны ботвы получает внешний импульсивный момент среза, под действием которого режущий элемент начинает отклоняться от радиального положения, достигаем максимального угла отклонения, после этого двигается в обратную сторону.
Следующий удар по ботве может быть нанесен при различных положениях режущего элемента и направлениях относительной скорости.
Одновременно с колебательным движением режущих элементов происходит вращение ротора.
С целью получения устойчивой работы ротора необходимо установить связь между вращением ротора, колебательным движением режущих элементов и импульсивным моментом среза. На основе анализа этой связи выявить оптимальный кинематический режим работы ротора и рациональные его параметры.
Для этого рассмотрим различные варианты движения ножа.
Рассмотрим три варианта движения ножа.
1) — движение ножа во время срезания ботвы, гдеугол, на который отклоняется нож от радиального направления за время срезания ботвы tср.
2) — движение ножа по инерции после срезания ботвы до момента времени tост., когда его угловая скорость станет равной нулю ().

3) -движение ножа к радиальному положению под действием центробежных сил, где — угол радиального направления до положения, в которое вернется нож за один оборот барабана.
Рассмотрим первый этап движения. Первый интеграл уравнения (3) найдем, представив (2).

Подставив в (3), получим.
Интегрируем по б, и проведя преобразования найдем первый угол отклонения.
(4).

— угол отклонения ножа от радиального положени.
где, определяются теоретически.

Рассмотрим участок движения ножа от до, где — угол при повороте на который нож останавливается.


На этом участке, Рср=0, начальная угловая скорость равна. При угловая скорость .
При этих условиях уравнение (2) движения ножей имеет вид.

(5).
Проинтегрировав уравнение, найдем время движения ножа на этом участке, и проведя преобразования, найдем угол остановки.

Так как, то.

(6).

где определяются теоретически Полный угол отклонения ножа в момент срезания ботвы от радиального положения до полной остановки определяется как, т. е.
(7).
картофельный ботводробитель шарнирный нож На основе разработанной теории определены углы отклонения ножей при срезании картофельной ботвы различной массы от радиального положения для каждого вида ножей и установлено их предельное отклонение не более допустимого 300 .
Расчет угла отклонения ножа в момент удаления ботвы от радиального направления до полной остановки проводился с применением математической системы MathCAD.
Расчет проведен при следующих данных:
- — радиус барабана R = 0,2 м;
- — угловая скорость вращения барабана щ = 125 с-1;
- — сила среза Рср меняется от 25,8 до 79,26 Н.
- — начальный угол отклонения ножа б0 = 0;
- — относительная начальная угловая скорость ножа щ0 = 0,05 с-1;
- — время среза tср = 0,02 с;
- — время остановки ножа tост = 0,015 с.
Геометрические характеристики ножей приведены в таблице 1.
Все данные для расчета взяты из конструктивных характеристик ботвоудаляющей машины БД — 4 М определены экспериментально [ссылка на статью].
Таблица 1. Геометрические характеристики ножей
Номер ножа. | Масса ножа. | Длина ножа. | Расстояние от точки подвеса до центра масс ножа. | Момент инерции ножа относительно точки подвеса. |
m, кг. | l, м. | сc, м. | IB, кгм2 | |
1,02. | 0,375. | 0,064. | 0,01. | |
0,663. | 0,310. | 0,072. | 0,007. | |
0,826. | 0,220. | 0,073. | 0,009. | |
1,468. | 0,175. | 0,12. | 0,02. |
Расчет углов отклонения при различных значениях силы среза приведены в таблицах 2, 3, и 4.
Таблица 2. Расчет угла отклонения ножа при минимальном значении силы среза.
Номер ножа. | Масса ножа. | Один росток (Рср = 25,8 Н). | Три ростка (Рср = 77,4 Н). | Пять ростков (Рср = 129 Н). | ||||||
Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | ||
m, кг. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | |
1,02. | 0,94. | 0,74. | 1,68. | 2,82. | 2,22. | 5,04. | 4,7. | 3,67. | 8,37. | |
0,663. | 2,08. | 0,19. | 2,27. | 6,24. | 0,43. | 6,67. | 10,4. | 0,48. | 10,88. | |
0,826. | 1,67. | 0,47. | 2,14. | 5,0. | 1,34. | 6,34. | 8,35. | 2,1. | 10,45. | |
1,468. | 1,35. | 0,64. | 1,99. | 4,01. | 1,89. | 5,9. | 6,76. | 3,06. | 9,82. |
Таблица 3. Расчет угла отклонения ножа при среднем значении силы среза
Номер ножа. | Масса ножа. | Один росток (Рср = 52,5 Н). | Три ростка (Рср = 157,5 Н). | Пять ростков (Рср = 262,5 Н). | ||||||
Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | ||
m, кг. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | |
1,02. | 1,9. | 1,5. | 3,4. | 5,74. | 4,47. | 10,21. | 9,56. | 7,36. | 16,92. | |
0,663. | 4,23. | 0,33. | 4,56. | 12,7. | 0,44. | 13,14. | 21,17. | 0,33. | 21,5. | |
0,826. | 3,4. | 0,93. | 4,33. | 10,2. | 2,46. | 12,66. | 17,0. | 3,5. | 20,5. | |
1,468. | 2,75. | 1,29. | 4,04. | 8,26. | 3,69. | 11,95. | 13,76. | 5,81. | 19,57. |
Таблица 4. Расчет угла отклонения ножа при максимальном значении силы среза.
Номер ножа. | Масса ножа. | Один росток (Рср = 79,26Н). | Три ростка (Рср = 237,78 Н). | Пять ростков (Рср = 396,3 Н). | ||||||
Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | Угол среза. | Угол остановки. | Угол отклонения. | ||
m, кг. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | бср, град. | бост, град. | ц, град. | |
1,02. | 2,89. | 2,27. | 5,16. | 8,66. | 6,69. | 15,35. | 14,44. | 10,98. | 25,92. | |
0,663. | 6,39. | 0,44. | 6,83. | 19,18. | 0,07. | 19,25. | 31,96. | 2,86. | 24,82. | |
0,826. | 5,15. | 1,37. | 6,52. | 15,4. | 3,3. | 18,7. | 25,66. | 3,96. | 29,62. | |
1,468. | 4,16. | 1,93. | 6,09. | 12,47. | 5,34. | 17,81. | 20,78. | 8,09. | 28,87. |
Определим период колебаний ножей.
Как известно, при воздействии силы среза на нож последний отклоняется на угол б и продолжает колебаться назад и вперед с последующим затуханием. Профессором М. Б. Углановым определен период колебаний ножа от действия силы среза. Период колебаний определяется из формулы (8):
(8).

где — момент инерции относительно оси подвеса В, ;
— масса ножа;
— расстояние оси центра вращения ротора до оси подвеса ножа, ;
— расстояние оси от подвеса ножа до центра тяжести, ;

— угловая скорость вращения ножа, ;
— угол отклонения;

— определенный интеграл.
Из формулы (8) видно, что период колебания ножа в поле центробежных сил зависит от амплитуды колебания, т. е. величины максимального угла от равновесного положения. И если мы построим зависимость периода колебания от амплитуды, то увидим, что период практически до угла б=30? является постоянным. Поэтому данный угол может быть принят как предельный дальше которого нож не должен отклоняться. Колебание режущего элемента в диапазоне 30?? б?30??будет практически гармоничным. Графически это будет иметь вид:
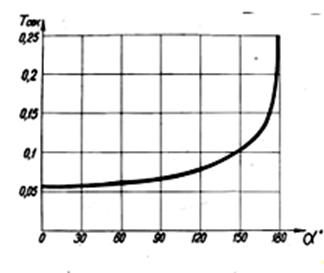
Рисунок 3- Зависимость периода колебаний от угла отклонения режущего элемента.
Определение длины ножей.
Значение одного из главных параметров ножа — длины мы определили из замеров профиля грядок специальным прибором на поле ООО Авангард, Рязанского района.

Рисунок 4- Прибор для измерения профиля грядок.
По полученным данным построили графическое изображение профиля грядок Анализ показывает, что профиль грядки до прохода установки хорошо согласуется с теоретической синусоидой и среднеквадратическое отклонение от теоретической синусоиды равно = 2,2%.

М(1) — данные прибора; Y (X) — теоретическая синусоида; Z(ki) — теоретические точки на синусоиде Y (X); /(M(1))i-Z(ki)/ - отклонение точек полученных прибором от теоретических точек.
Сравнительный график лабораторных данных с теоретической синусоидой.
Для определения длины шарнирных ножей мы воспользовались графоаналитическим методом. Для определения длин ножей за основу возьмем нож L 4 = 175 мм. от серийной машины КИР-1,5. Для этого мы опустим ротор до тех пор, пока средний короткий нож L 4 не коснется верхней точки грядки.

Схема для определения длины переменных ножей Следующий нож L 3 будет длиннее L 4 на величину Н1 и он также коснется грядки, последующие ножи L2 и L1 будут длиннее соответственно на величину Н2 и Н3. Величины Н1, Н2 и Н3. найдем из схемы Рис. 2.8. Они будут: Н1= 45 мм, Н2=135мм и Н3 200 мм.
Таким образом, определим длину ножей по формуле:
L = L4 + Hi,.
Таким образом, L1 = 375 мм, L2 =310мм, L3 =220мм, L4 = 175 мм.
Выводы
- 1. На основе анализа конструкций роторных машин нами предложен новый вариант ротора с шарнирными ножами и переменным диаметром резания. Такая конструкция обеспечивает копирование картофельных грядок и дает возможность максимального удаления ботвы и растительных остатков.
- 2. Разработана математическая модель, устанавливающая связь между параметрами шарнирных ножей и срезаемой массой ботвы, что позволило определить отклонение шарнирных ножей от радиального положения.
На основе разработанной теории определены углы отклонения от радиального положения для каждого вида ножей и установлено их предельное отклонение не более допустимого 300.
3. На основе исследования профиля грядок и учитывая «охват» ножей поверхности грядки мы графоаналитическим методом определили:
переменную длину 4 ножей, которая равна:
L1 = 375мм — это ножи срезают ботву в междурядьях;
L2 = 310 мм.
L3 = 220 мм и.
L4 = 175мм — это ножи срезают ботву на вершине грядки;
- 1. Угланов М. Б. Разработка комплекса машин для уборки картофеля на основе совершенствования рабочих органов и рационального их сочетания. Докторская диссертация, 1991.
- 2. Абрамов Ю. Н, Динамика шарнирно режущего элемента ботвоуборочной машины в поле центробежных сил. Сб. научных трудов. Энергосберегающие технологии использования машинно-тракторного парка/Ю.Н. Абрамов, М. Б. Угланов Машино-тракторного парка// РГСХА, 2004.-с. 67−72.
- 3. Угланов М. Б., Абрамов Ю. Н Обоснование основных параметров ротора ботводробителя. Сборник научных трудов по материалам научно-практической конференции. Рязанский ГАТУ им. Костычева. 1996. с.