Манипулятор робота.
Уровни управления роботами
В гидравлическом приводе используется гидроцилиндр. На рисунке 29, а показана схема такого привода, сообщающего руке робота возвратно-поступательное движение. Принцип его действия следующий. В цилиндр 1, в котором находится поршень 2, соединенный с помощью штока с манипулятором 3, поступает под давлением жидкость (отсюда название — гидроцилиндр); она-то и заставляет передвигаться поршень… Читать ещё >
Манипулятор робота. Уровни управления роботами (реферат, курсовая, диплом, контрольная)
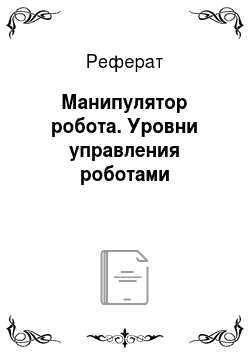
Исполнительный механизм робота — это его механическая рука или, как ее еще называют, манипулятор. Манипулятор состоит из шарнирно соединенных звеньев (рис. 14), как рука человека из костей, связанных суставами. Последнее (рабочее) звено / манипулятора, называемое схватом, является аналогом кисти человеческой руки. Число звеньев у манипулятора бывает обычно в пределах от двух (как на рис. 15) до шести (рис. 16) в зависимости от назначения и области применения робота. Звенья подвижны относительно друг друга и могут совершать вращательные или поступательные движения (рис. 17,6, в, г, д, е) в отличие от человеческой руки они могут еще и удлиняться.
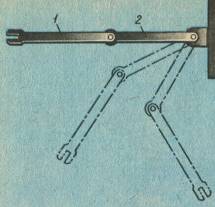
Рис. 15. Схема двухзвенного манипулятора.
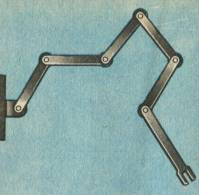
Рис. 16. Схема манипулятора, состоящего из шести звеньев.
Благодаря этому схват может двигаться по любой, самой причудливой траектории (рис. 18).
Схват, как видно из его названия, служит для удержания и переноса предметов. Он может быть самой разнообразной конструкции: похожим на клешню краба (рис. 19) или на кулачковый патрон, как у дрели, в виде мягких резиновых пальцев (рис. 20), в которые подается воздух, чтобы они приняли нужную форму (эта конструкция схвата применяется для работы с хрупкими предметами: электролампами, радиоэлементами), а может иметь и другой, удобный. Для конкретного дела вид (рис. 21).
Число пальцев тоже может быть разным. Самые простые — двухпальцевые схваты похожи на обычные плоскогубцы (рис. 22); более экзотический вид имеют многопальцевые схваты, например, изображенные на рисунке 20 или 23. Принцип захвата нужного предмета может быть не только механическим (зажим — разжим), но и электромагнитным, если предмет из ферромагнитного материала (рис. 24, слева); схват может действовать и как вакуумные присоски (рис. 24, справа) или клейкая лента и т. д.
Иногда последним звеном манипулятора служит не схват, а в зависимости от предназначения робота соответствующий рабочий инструмент: дрель (рис. 25), гаечный ключ, краскораспылитель, сварочная горелка и др. Робот с таким манипулятором может быть сварщиком, маляром и т. д. Число, форма и способы соединения звеньев манипулятора обусловливают большое разнообразие их внешнего вида (рис. 26).
Наиболее распространен однорукий робот (имеющий один манипулятор). Он может выполнять только одну операцию, да и то не слишком быстро.
Рис. 17. Возможные движения манипулятора (показаны стрелками): а — удлинение (или укорочение) рабочего звена; б, г, д, е — вращение звеньев; в — поступательное перемещение.
Для повышения производительности робота его иногда снабжают двумя (рис. 27), тремя и даже четырьмя одинаковыми манипуляторами, а для расширения его функций — разными манипуляторами. Например, промышленные роботы, обслуживающие прессы холодной штамповки, имеют по два разных манипулятора: один (основной) предназначен для захвата заготовки и установки ее под пресс, а другой (упрощенной конструкции) — для сталкивания готовой детали в бункер.
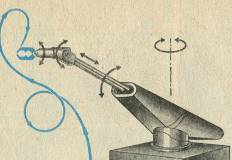
Рис. 18. Совместные перемещения звеньев позволяют схвату описывать в пространстве (ограниченном размерами и конструкцией манипулятора) траекторию практически любой формы.
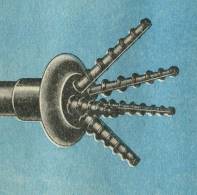
Рис. 20. Надувной схват с пятью гибкими резиновыми пальцами.
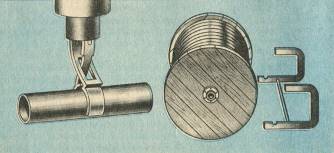
Рис. 21. Схваты, предназначенные для переноса труб (слева) и барабанов с кабелем (справа).
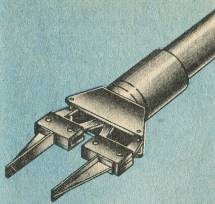
Рис. 22. Двухпальцевый схват
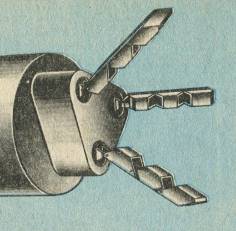
Рис. 23. Трехпальцевый схват со сложной формой пальцев.
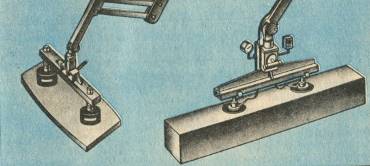
Рис. 24. Немеханические схваты: магнитный (слева), с присосками (справа).
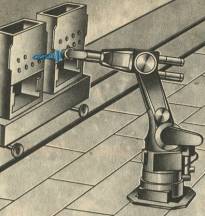
Рис. 25. Робот-сверловщик: его рабочим звеном служит дрель — она заменяет схват.
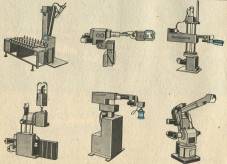
Рис. 26. Разнообразные конструкции манипуляторов, обусловленные особенностями их применения.
Рис. 27. " Двурукий" робот.
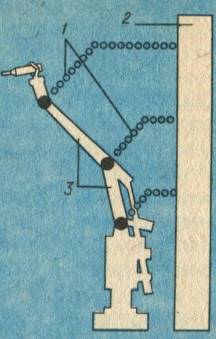
Рис. 28. Условная схема действия приводов 1 — «мускулов руки» робота: за счет энергии источника 2 они приводят в движение звенья манипулятора 3 в различных их соединениях («суставах»).
Перемещение звеньев манипулятора обеспечивают так называемые приводы — аналоги мускулов в руке человека. Приводы являются источниками механической энергии, нужной для движения «звеньев (рис. 28). Если источником механической энергии служит электродвигатель, то привод называют электрическим, если таким источником является гидроили пневмоцилиндр, то привод называют гидравлическим или пневматическим.
В электропривод, кроме электродвигателя, входят еще редуктор, который снижает число оборотов электродвигателя и увеличивает усилие, действующее на манипулятор, и электронная схема управления, которая регулирует скорость вращения электродвигателя. Этот способ приведения в действие манипулятора обладает рядом достоинств: не загрязняет окружающую среду отработанным газом или маслом, относительно малошумен; к тому же современные полупроводниковые схемы управления дешевы и надежны в работе. Все эти качества делают электропривод наиболее перспективным как в настоящем, так и в будущем.
В гидравлическом приводе используется гидроцилиндр. На рисунке 29, а показана схема такого привода, сообщающего руке робота возвратно-поступательное движение. Принцип его действия следующий. В цилиндр 1, в котором находится поршень 2, соединенный с помощью штока с манипулятором 3, поступает под давлением жидкость (отсюда название — гидроцилиндр); она-то и заставляет передвигаться поршень, а вместе с ним руку робота. Направление этого движения определяется тем, в какую часть цилиндра (в пространство над поршнем или под ним) нагнетается в данный момент жидкость.
Гидроцилиндр может сообщать манипулятору и вращательное движение. Обратите внимание на то, как соединен шток гидроцилиндра со звеном руки робота на рисунке 29,6. В этом случае возвратно-поступательное перемещение штока вызовет поворот соединенного с ним звена относительно предыдущего в ту или другую сторону.
Гидравлический привод имеет свои преимущества. Прежде всего это сравнительно небольшая масса привода, приходящаяся на единицу его мощности, малая инерционность, высокое быстродействие. Важное свойство гидропривода — возможность получения с его помощью малой скорости движения без редуктора и при сохранении плавности перемещения. Благодаря этим качествам гидропривод получил широкое распространение в мощных промышленных и других роботах.
Пневматический привод аналогичен гидравлическому; в нем роль двигателя выполняет пневмоцилиндр, т. е. цилиндр, в котором поршень перемещается под действием сжатого воздуха. Особенностью пневмопривода является то, что используемое в нем рабочее вещество — воздух — легко сжимается, тогда как в гидроцилиндре жидкость практически несжимаема. Вследствие этого пневмопривод целесообразен лишь для роботов, производящих операции с мелкими и легкими деталями, например, в технологических процессах приборостроения, часовой промышленности и пр. Другая причина, сдерживающая применение роботов с пневмоприводом в цехах заводов, — шум, которым сопровождается выброс из пневмоцилиндра отработавшего воздуха. Поэтому в помещениях, где работают люди, нужна специальная дорогостоящая акустическая защита.
Итак, привод, являясь мускулом манипулятора, приводящим его в движение, во многом определяет, каков снабженный этим приводом робот: насколько он силен (какова его грузоподъемность), ловок (как точно он может выполнить заданное действие), быстр (сколько ему надо на это времени) и др., т. е. определяет, несомненно, очень важные характеристики робота.

Рис. 29. Гидроцилиндр, сообщающий руке робота: а — поступательное, бвращательное движение.
Поэтому изучение и конструирование приводов выделено в самостоятельную науку: в институтах и конструкторских бюро разработкой приводов занимаются в специализированных лабораториях и отделах инженеры-приводники. Они стремятся в наибольшей степени уменьшить размеры (или, как говорят в технике, габариты) и массу привода, повысить его быстродействие, улучшить обеспечиваемую им точность позиционирования (точность попадания рабочего звена манипулятора в нужное место), увеличить надежность и удобство эксплуатации, снизить стоимость. робот манипулятор клешнеобразный На этом пути они добились уже немалых успехов, например, достигнута такая точность позиционирования, при которой погрешность подведения манипулятора к заданному месту составляет всего единицы микрометров, а быстродействие манипулятора (от которого в первую очередь зависит производительность труда робота), измеряемое скоростью его перемещения, может превышать несколько метров в секунду.
Тем не менее, здесь имеется широчайшее поле деятельности. И не только в плане совершенствования уже применяющихся конструкций и улучшения их характеристик, но и в области разработки новых. Дело в том, что становление робототехники совершенно естественно началось с применения наиболее простых и дешевых средств приведения манипуляторов в действиес использования пневматического привода. По мере того как роботы осваивали разнообразные трудовые операции, требовались такие приводы, которые обеспечивали бы эффективность их работы в новых условиях. В связи с этим стало расширяться применение и гидравлических, и электрических приводов. К настоящему времени около 40% роботов имеют пневматический привод, примерно столько же — гидравлический, и только 20%-электрический, хотя последний хорошо управляем, удобен в эксплуатации, имеет относительно высокий КПД. Причина сложившегося положения в том, что электропривод по сравнению с другими имеет худшие массогабаритные характеристики, т. е. он более тяжел и громоздок, если обеспечивает такую же, как они, грузоподъемность и скорость перемещения манипулятора. Однако ценные качества электропривода, особенно экологичность, побуждают искать возможности его более широкого применения. Заманчивые перспективы в этом отношении открывает прогресс в создании компактных электродвигателей специально для роботов.
Что же касается тех роботов, которыми уже оснащены промышленные предприятия, то их обслуживание техниками-эксплуатационниками состоит прежде всего в контроле за техническим состоянием и исправностью именно приводов манипуляторов.