Расчёт надёжности комплекса в системе «Арбитр»
Рис. 7 — Структурно-логическая модель программно-аппаратного комплекса. В данной модели узлы макета обозначены цифрами:1.Arduino Uno R3 — комбайн 2. Аккамулятор комбайна 3. Сервопроивод управления жаткой комбайна 4. Сервпривод управления движением комбайна 5. Сервопривод управления шнеком комбайна 6. Двигатель шнека комбайна 7. Двигатель комбайна 8. Ультразвуковой датчик расстояния комбайна 9… Читать ещё >
Расчёт надёжности комплекса в системе «Арбитр» (реферат, курсовая, диплом, контрольная)
Проектная оценка надежности программно-аппаратного комплекса выполнена по методике, основанной на применении новой информационной технологии автоматизированного структурно-логического моделирования систем (АСМ), реализованной в программном комплексе АРБИТР. Выбор этой методики обусловлен следующим.
Практически все существующие методики проектной оценки надежности основываются на ручном построении расчетных аналитических или статистических моделей систем. Однако, построение расчетных моделей надежности современных сложных систем, к которым относится данная система, этими методиками практически невозможно из-за непреодолимой громоздкости и трудоемкости ручного применения всех известных методов моделирования. Приближенные аналитические модели надежности реальных систем, как правило, не удовлетворяют требованиям точности проектных расчетов надежности систем данного класса.
Выходом из этого положения является автоматизация самого процесса построения расчетных математических моделей свойств надежности проектируемых систем, создание соответствующих программных средств и разработка методик их практического применения в технологии автоматизированного моделирования. Одной из таких наиболее теоретически разработанных и практически реализованных технологий является автоматизированное структурно-логическое моделирование (АСМ) систем. В основе этой технологии лежит так называемый общий логико-вероятностный метод (ОЛВМ) системного анализа. В настоящее время технология АСМ обеспечивает практическую возможность автоматического построения четырех основных видов математических моделей структурно-сложных систем — аналитических, статистических, марковских и сетевых. Приведенная в настоящем отчете проектная оценка надежности выполнена на основе технологии аналитического АСМ, в котором автоматизирован процесс построения логических и точных многочленов расчетных вероятностных функций различных свойств надежности проектируемой системы.
Практическая реализация технологии автоматизированного структурно-логического моделирования и проектной оценки надежности осуществлена с помощью специальной методики, которая включает в себя следующие три последовательные этапа:
- 1) Первичное структурно-логическое моделирование системы. На этом этапе разрабатываются частные и общие структурные модели надежности программно-аппартного комплекса. Для этого используется специальный графический аппарат схем функциональной целостности (СФЦ). Задаются вероятностные параметры элементов и логические критерии работоспособности подсистем и МР в целом;
- 2)Автоматизированное моделирование и расчет системных показателей надежности. На этом этапе построение требуемых математических моделей и выполнение расчетов показателей надежности для всех 13 основных подсистем и МР в целом выполняется автоматически с помощью программного комплекса АРБИТР;
- 3)Анализ результатов, выработка и обоснование проектных решений. На этом этапе полученные с помощью комплекса АРБИТР результаты используются для содержательного анализа свойств надежности МР и обоснования их соответствия заданным требованиям.
Центральное место в автоматизированном структурно-логическом моделировании занимает построение структурных моделей надежности. Структурные модели в АСМ строятся с помощью специального аппарата СФЦ.
Структурно-логическая модель программно-аппаратного комплекса выглядит так:
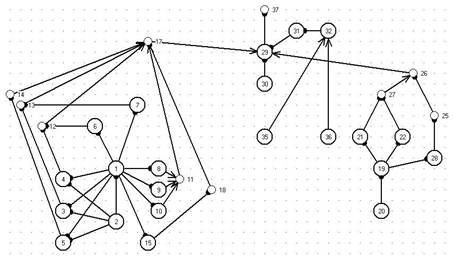
Рис. 7 — Структурно-логическая модель программно-аппаратного комплекса. В данной модели узлы макета обозначены цифрами:1.Arduino Uno R3 — комбайн 2. Аккамулятор комбайна 3. Сервопроивод управления жаткой комбайна 4. Сервпривод управления движением комбайна 5. Сервопривод управления шнеком комбайна 6. Двигатель шнека комбайна 7. Двигатель комбайна 8. Ультразвуковой датчик расстояния комбайна 9. Датчик Холла комбайна 10. Датчик освещённости комбайна 15. Bluetooth-модуль комбайна 19. Arduino Uno R3 — трактор 20. Аккамулятор трактора 21. Сервпривод управления движением трактора 22. Двигатель трактора 28. Bluetooth-модуль трактора 29. Программа управления 30. Bluetooth-модуль центра управления 31. Навигационная программа 32. Видеокамера 35. Визуальная метка комбайна 36. Визуальная метка трактора. Также цифрами обозначены фиктивные вершины функций макета: 11. Функция получения данных с датчиков макета комбайна 12. Функция движения макета комбайна 13. Функция выгрузки «зерна» 14. Функция управления жаткой 18. Функция обмена данными между макетом комбайна и программой управления на ПК по Bluetooth 17. Функция общей работоспособности макета комбайна. 25. Функция обмена данными между макетом трактора и программой управления на ПК по Bluetooth 26. Функция общей работоспособности макета траткора 27. Функция движения макета трактора 37. Функция общей работоспособности системы.
Также в данной схеме рёбра между вершинами обозначают структурно-логическое отношение «обеспечивает». Ребро со стрелкой обозначает дизъюнктивное отношение, а с полукругом — конъюктивное.
Для узлов макета определены значения их надёжности. Значения надёжности определены из параметров, предоставленных производителями комплектующих макета. Значения находятся в таблице:
Таблица 2 — Надёжности элементов макета.
Элемент. | Надёжность элемента. |
аrduino uno R3. | 0.95. |
аккамулятор | 0.9. |
сервопривод управления шнеком. | 0.95. |
сервопривод управления движением. | 0.95. |
сервопривод управления жаткой. | 0.95. |
двигатель макета. | 0.95. |
двигатель шнека. | 0.9. |
ультразвуковой датчик расстояния. | 0.8. |
датчик Холла. | 0.85. |
датчик освещённости. | 0.9. |
Bluetooth-модуль. | 0.95. |
Программа управления. | 0.95. |
Bluetooth-модуль центра управления. | 0.95. |
Навигационная программа. | 0.95. |
Видеокамера. | 0.8. |
Визуальная метка комбайна. | 0.95. |
Визуальная метка трактора. | 0.95. |
Для функций работы макета были проведены расчёты и получены результаты, использованные для расчета функции общей работоспособности макета. Для неё были получены следующие результаты.
Параметры СФЦ:
Число вершин — N=33. Число элементов — H=22.
Вероятностная функция содержит 30 одночленов Р=0.649 894 387 317 — вероятность реализации критерия функционирования системы в целом.
Таблица 3 — Таблица характеристик элементов системы в целом.
Номер элемента. | Надёжность элемента. | Значимость элемента. | Отрицательный вклад. | Положительный вклад. |
0.95. | 0.9. | — 0.855. | 0.045. | |
0.9. | 0.95. | — 0.855. | 0.095. | |
0.95. | 5.627. | — 8.3916. | 2.8135. | |
0.95. | 8.8332. | — 1.7225. | 4.4166. | |
0.95. | 1.8131. | — 8.3916. | 9.0657. | |
0.95. | 8.8332. | — 5.3456. | 4.4166. | |
0.9. | 5.9396. | — 5.3456. | 5.9396. | |
0.8. | 4.5328. | — 0.1 026. | 9.0657. | |
0.85. | 6.0438. | — 5.1372. | 9.0657. | |
0.9. | 9.0657. | — 8.1591. | 9.0657. | |
0.95. | 1.8131. | — 1.7225. | 9.0657. | |
0.95. | 0.99 122. | — 0.94 166. | 0.49 561. | |
0.95. | 0.99 122. | — 0.94 166. | 0.49 561. | |
0.95. | 0.99 122. | — 0.94 166. | 0.49 561. | |
0.95. | 0.10 463. | — 0.94 166. | 0.10 463. | |
0.95. | 0.99 122. | — 0.94 166. | 0.49 561. | |
0.95. | 0.6841. | — 0.64 989. | 0.34 205. | |
0.95. | 0.6841. | — 0.64 989. | 0.34 205. | |
0.8. | 0.6841. | — 0.64 989. | 0.34 205. | |
0.95. | 0.81 237. | — 0.64 989. | 0.16 247. | |
0.95. | 0.32 576. | — 0.30 947. | 0.16 288. |
Также для этой функции имеется диаграмма положительных вкладов элементов.
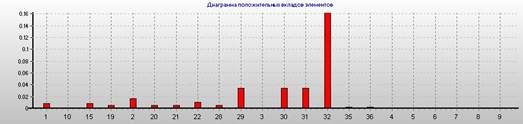
Рис. 8 — Диаграмма положительных вкладов элементов.
Диаграмма отрицательных вкладов элементов:
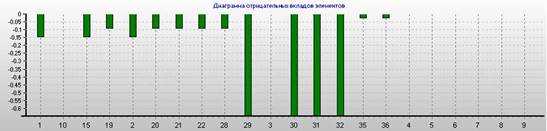
Рис. 9 — Диаграмма отрицательных вкладов элементов.
Таким образом, по полученным результатам, наиболее критичными узлами системы являются плата управления и аккумулятор макетов, а также программа управления комплексом и программа навигации. Если эти узлы не будут функционировать — не будет функционировать вся система. При дальнейшей разработке системы необходимо обеспечить резервирование данных элементов и тем самым повысить надёжность системы.