Выделение границ объекта
В качестве объекта управления необходимо принять тот объект, у которого неуправляемость минимальна. Таким образом, сравнив значения неуправляемости потенциальных объектов управления, мы пришли к выводу, что объектом управления следует выбрать центральную лабораторию прочности. Где y1,…, ym — точки съема информации, необходимой для оценки реализуемости множества целей {Z*} в объекте. Причем Y… Читать ещё >
Выделение границ объекта (реферат, курсовая, диплом, контрольная)
Поскольку на предыдущем этапе мы сформулировали цель управленияснижение продолжительности подготовки актов списания использованных деталей, то, очевидно, объектом управления необходимо брать центральную лабораторию прочности, однако нам следует исследовать где заканчиваются границы объекта.
Таким образом, мы имеет два варианта объекта управления (границы объектов управления представлены на рисунке 2):
Центральная лаборатория прочности (Рисунок 2, а).
Связь между входами и выходами устанавливается в виде.
Y= F0(X1, U1, E1).
Центральная лаборатория прочности и процесс проведения испытаний (Рисунок 2, б).
Связь между входами и выходами устанавливается в виде.
Y= F01((F02(X2, U2, E2)), U1, E1).
Где y1,…, ym — точки съема информации, необходимой для оценки реализуемости множества целей {Z*} в объекте. Причем Y= (y1,…, ym) — результирующее состояние объекта, X1, X2- контролируемые входы объекта, E1, E2 — неконтролируемые входы объекта, U1, U2 — управляемые входы объекта.
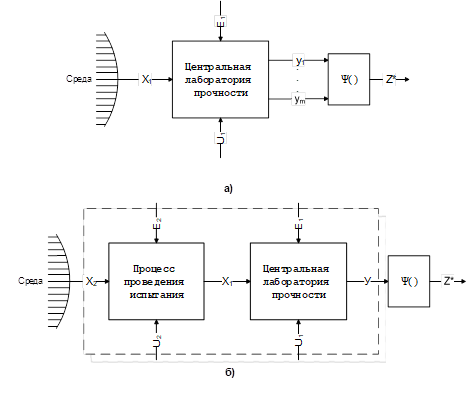
Рисунок 2. Границы объекта управления.
Управляемость объекта
Процедуру выделения объекта из среды необходимо строить так, чтобы в получившемся объекте реализовались цели управления, т. е. чтобы эффективно управлять в различных ситуациях, складывающихся в процессе управления. Для этого введем понятие управляемости объекта, под которым будем подразумевать вероятность достижения задаваемых целей в различных ситуациях.
Под ситуаций, образовавшейся в процессе управления, следует понимать тройку: S= ‹X, E, Z*›, определяющую состояние неуправляемых входов объекта и цель управления. Все ситуации можно подразделить на два подмножества ситуаций — управляемых, при которых заданная цель Z* всегда достигается, и неуправляемых, когда эта цель не достигается.

{S} - множество всех возможных ситуаций S, пустьподмножество ситуаций, где объект неуправляем, аподмножество ситуаций, где объект управляем. Каждая ситуация появляется с вероятностью с=с (S), сумма их вероятностей равна:, где N — число встречающихся ситуаций.

Тогда управляемость объекта — это вероятность того, что случайно выбранная ситуация управляема и она равна:, где n — количество управляемых ситуаций. Неуправляемость объекта вычисляется аналогично:, где m-количество неуправляемых ситуаций.
Для решения задачи определения множеств, и функции с (S) необходимо привлечение экспертов. Для оценки управляемости объекта необходимо декомпозировать проблему, т.к. экспертами могут быть решены только простые задачи, поэтому экспертам необходимо предоставить исходные данные. К ним относятся:
Цели управления {Z*} - снижение продолжительности подготовки актов списания использованных деталей.
Сведения о располагаемых ресурсах R: 5 человек, персональные электронные вычислительные машины (ПЭВМ) 5 шт, техническая и сопроводительная документация.
Обозначим эти исходные данные двойкой: A=‹{Z*}, R›.
Описание объекта управления F01: Центральная лаборатория прочности — лаборатория занимается исследованием усталости, трещиностойкости материалов, ресурсом и живучестью конструкций, влиянием коррозии и температуры на усталостную прочность, исследованием износа трущихся деталей.
Описание множеств{X} контролируемых состояний среды:
x1 — число испытаний;
x2 — время затрачиваемое на проведение испытания;
x3 — виды испытаний;
x4 — методики испытаний;
Описание множества {U}R управлений, допустимых ресурсами R:
u1 — количество осветительных приборов;
u2 — удобство расположения документации;
u3 — предельное количество испытаний на отдел;
u4 — ловкость и навык работы;
Описание множества {E} неконтролируемых факторов среды и объекта:
е1 — выход из строя испытательного стенда;
e2 — выход из строя измерительных приборов;
e3 — количество нарушений технологического процесса при изготовлении деталей;
e4 — нарушение методики испытаний;
e5 — количество деталей подлежащих списанию;
Эти данные об объекте обозначим: B=‹F0, {X}, {U}R, {E}›.
Эксперт располагая исходными данными, А и В, должен оценить управляемость Р объекта. Обозначим через ц алгоритм работы эксперта, тогда P=с (А, В). Однако реализовать алгоритм ц затруднительно, т.к. эта задача слишком сложна. Поэтому необходима декомпозиция данной задачи. Для этого введем различные виды управляемости и неуправляемости объекта.
Объект абсолютно управляем, если каждая ситуация из множества ситуаций {S} управляема, что очень редко встречается на практике при управлении сложными объектами. Поэтому используем частичную (относительную) управляемость, которая бывает следующих видов:
X-неуправляемость: существует такое допустимое X, при котором для любых допустимых E и Z* не найдется такого допустимого U, при котором цель Z* будет достигнута.
E-неуправляемость: существуют такие допустимые неконтролируемые состояния среды E, при которых при любых допустимых X не удается достигнуть любой допустимой цели.
Z-неуправляемость: существуют такие допустимые цели Z, которые при любых допустимых X, E и U никогда не достигаются.
Помимо этого, отмечают наличие и перекрестных неуправляемостей:
XE-неуправляемость: одновременно существуют такие допустимые X и E, при которых не всякая цель достижима.
XZ*-неуправляемость: одновременно существуют такие допустимые X и Z*, при которых всякая цель не достижима.
Z*E-неуправляемость: одновременно существуют такие допустимые Z* и E, при которых всякая цель не достижима.
XEZ*-неуправляемость: одновременно существуют такие допустимые X, E и Z*, при которых всякая цель не достижима.

Каждая из вышеперечисленных видов неуправляемости определяется вероятностью появления, тогда оценив их с помощью экспертных оценок, мы можем найти неуправляемость объекта по формуле:, где i-вид неуправляемости, а n-их число.

Пригласим ранее рассмотренную группу экспертов и, используя метод ранга, определим вероятность появления i-го вида неуправляемости для каждого вида объекта.
Для начала выявим ситуации S, при которых цели не достигаются. Выделяют несколько этапов классификации этих ситуаций по видам неуправляемости.
Экспертам необходимо выделить все неуправляемые ситуации.
В первую очередь, из общего списка ситуаций экспертами должны быть сформированы списки неуправляемых ситуаций.
Общий список ситуаций находится по формуле:
Si= ‹xj, el, Z*›, где i — количество ситуаций, j — количество контролируемых входов, l-количество неконтролируемых входов.
Придя к общему мнению, эксперты предоставили список всех неуправляемых ситуаций для 1-го объекта (центральная лаборатория прочности):
{S2 = ‹x1, e2, Z*›, S3 = ‹x1, e3, Z*›, S4 = ‹x1, e4, Z*›, S6 = ‹x2, e1, Z*›, S7 = ‹x2, e2, Z*›, S8 = ‹x2, e3, Z*›, S9 = ‹x2, e4, Z*›, S10 = ‹x2, e5, Z*›, S12 = ‹x3, e2, Z*›, S13 = ‹x3, e3, Z*›, S14 = ‹x3, e4, Z*›, S16 = ‹x4, e1, Z*›, S17 = ‹x4, e2, Z*›, S18 = ‹x4, e3, Z*›, S19 = ‹x4, e4, Z*›, S20 = ‹x4, e5, Z*›.
модель объект синтез управление Придя к общему мнению, эксперты предоставили список всех неуправляемых ситуаций для 2-го объекта (центральная лаборатория прочности и процесс проведения испытаний):
{S2, S3, S4, S5 = ‹x1, e5, Z*›, S6, S7, S8, S10, S11 = ‹x3, e1, Z*›, S12, S13, S14, S15 = ‹x3, e5, Z*›, S16, S17, S18, S19, S20,}.
Экспертам необходимо оценить вероятности появления каждого вида неуправляемости используя полный перечень неуправляемых ситуаций.
Для выявления общего мнения экспертов необходимо получить данные о прогнозных значениях от каждого эксперта, а затем произвести расчеты, используя систему взвешенных индивидуальных значений по критерию вероятности появления определенного вида неуправляемости. Используем метод взвешивания различных мнений — использование весов пропорциональных степени важности эксперта, соответствующей их компетенции.
Оценки экспертов по вероятности появления каждого вида неуправляемости представлены в таблице 2, 3.
Далее найдем относительные оценки компетентности экспертов, воспользовавшись значениями коэффициентов компетентности по формуле.

:
ц1=0,25; ц2=0,25; ц3=0,29; ц4=0,2.
Таблица 2 — Матрица оценок вероятности появления i-го вида неуправляемости для объекта центральная лаборатория прочности.
i/j. | с1. | с2. | с3. | с4. | с5. | с6. | с7. |
Э1. | 0,08. | 0,34. | 0,02. | 0,27. | 0,12. | 0,02. | |
Э2. | 0,06. | 0,31. | 0,01. | 0,4. | 0,01. | 0,01. | 0,01. |
Э3. | 0,07. | 0,3. | 0,3. | 0,032. | 0,013. | ||
Э4. | 0,1. | 0,39. | 0,31. | 0,02. | 0,04. | 0,03. |
Таблица 3 — Матрица оценок вероятности появленияi-го вида неуправляемости для объекта центральная лаборатория прочности и процесс проведения испытаний.
i/j. | с1. | с2. | с3. | с4. | с5. | с6. | с7. |
Э1. | 0,04. | 0,3. | 0,3. | 0,11. | 0,03. | 0,04. | |
Э2. | 0,05. | 0,3. | 0,02. | 0,4. | 0,03. | 0,03. | |
Э3. | 0,12. | 0,16. | 0,42. | 0,11. | 0,05. | ||
Э4. | 0,12. | 0,29. | 0,02. | 0,34. | 0,04. | 0,06. |
Используя значения матриц нормированных оценок и относительные оценки компетентности экспертов, найдем веса i-го вида неуправляемости, которые и будут характеризовать вероятность их появления, по формуле: wj=?pj (эi)*цi, где j — вид неуправляемости, i — эксперт.
Таблица 4 — Матрица нормированных оценок вероятностей появления i-го вида неуправляемости для центральная лаборатория прочности.
с1. | с2. | с3. | с4. | с5. | с6. | с7. | Сумма. | |
Э1. | 0,08. | 0,34. | 0,02. | 0,27. | 0,12. | 0,02. | 0,08. | |
Э2. | 0,06. | 0,31. | 0,01. | 0,4. | 0,01. | 0,01. | 0,01. | 0,06. |
Э3. | 0,07. | 0,3. | 0,3. | 0,032. | 0,013. | 0,07. | ||
Э4. | 0,1. | 0,39. | 0,31. | 0,02. | 0,04. | 0,03. | 0,1. | |
Веса целей. | 0,08. | 0,34. | 0,01. | 0,32. | 0,05. | 0,01. | 0,02. |
Таблица 5 — Матрица нормированных оценок вероятностей появления i-го вида неуправляемости для объекта центральная лаборатория прочности и процесс проведения испытаний.
с1. | с2. | с3. | с4. | с5. | с6. | с7. | Сумма. | |
Э1. | 0,04. | 0,31. | 0,3. | 0,11. | 0,03. | 0,04. | 1,00. | |
Э2. | 0,05. | 0,35. | 0,02. | 0,4. | 0,03. | 0,03. | 1,00. | |
Э3. | 0,12. | 0,16. | 0,52. | 0,11. | 0,05. | 1,00. | ||
Э4. | 0,12. | 0,29. | 0,02. | 0,34. | 0,04. | 0,06. | 1,00. | |
Веса целей. | 0,08. | 0,26. | 0,01. | 0,37. | 0,07. | 0,01. | 0,05. |
Веса целей для объекта — центральная лаборатория прочности:
w1=0,08;w2=0,34;w3=0,01;w4=0,32;w5=0,05;w6=0,01;w7=0,02;
=0,82.
Веса целей для объекта — центральная лаборатория прочности и процесс проведения испытаний:
w1=0,08;w2=0,26;w3=0,01;w4=0,32;w5=0,05;w6=0,01;w7=0,02;
=0,85.
В качестве объекта управления необходимо принять тот объект, у которого неуправляемость минимальна. Таким образом, сравнив значения неуправляемости потенциальных объектов управления, мы пришли к выводу, что объектом управления следует выбрать центральную лабораторию прочности.