Деформация твердых тел, линейные и нелинейные деформацонные процессы
Величины внешних, т. е. поверхностных нагрузок, а также внутренних сил характеризуются их интенсивностью, т. е. величиной усилия, приходящегося на единицу площади поверхности, на которую они действуют. При рассмотрении внутренних усилий эту интенсивность обычно называют напряжением. Это название можно сохранить и для внешних нагрузок, если они распределены на рассматриваемой области сплошным… Читать ещё >
Деформация твердых тел, линейные и нелинейные деформацонные процессы (реферат, курсовая, диплом, контрольная)
Линейно-упругие деформации твёрдых тел
Теория упругости изучает вопросы деформирования и напряжения различных упругих тел, возникающих под действием внешних сил.
Величины внешних, т. е. поверхностных нагрузок, а также внутренних сил характеризуются их интенсивностью, т. е. величиной усилия, приходящегося на единицу площади поверхности, на которую они действуют. При рассмотрении внутренних усилий эту интенсивность обычно называют напряжением. Это название можно сохранить и для внешних нагрузок, если они распределены на рассматриваемой области сплошным образом. Если? P обозначим усилие, приходящееся на рассматриваемую элементарную площадку? S, то указанное выше напряжение определяется следующим образом:
Заметим, что такая формулировка понятия напряжения непременно предполагает тело сплошным, непрерывным.
Внешнюю силу, произвольно ориентированную в пространстве в декартовой системе координат можно представить в виде составляющих Px, Py, Pz, имеющих ориентацию по осям координат. При обозначении напряжения одного индекса недостаточно, так как кроме направления действия составляющей, необходимо еще определить и площадку, на которую она действует. Напряжения представляют в виде двух составляющих: нормальное? и касательное? напряжения. Индекс нормального напряжения указывает ту ось, параллельно которой направлена составляющая. Касательные напряжения имеют два индекса: первый индекс соответствует оси, параллельно которой действует составляющая, а второй индекс указывает на направление нормали к площадке, на которую действует составляющая. На рисунке 1.1 представлены составляющие напряжения в декартовой системе координат.
Рисунок 1.1 — Составляющие напряженияв декартовой системе координат Для составляющих напряжения принимается следующее правило знаков: нормальное напряжение считается положительным, когда оно вызывает растяжение, и отрицательным, когда оно вызывает сжатие. Для касательных напряжений положительным направлением будет то, которое совпадает с направлением координатной оси.
Под деформацией понимают изменение линейных размеров тела. Деформация любого элементарного объема может быть представлена состоящей из ряда отдельных простейших деформаций, т. е. разложена на составляющие.
В случае элементарного параллелепипеда имеется шесть составляющих деформации: три ее линейные составляющие (удлинение ребер) и три угловые составляющие (сдвиги).
Относительные удлинения ребер обозначают ??? с индексом, указывающим направление удлинения. Положительными линейными деформациями считаем удлинения, отрицательными — укорочения. Считается, что положительному сдвигу соответствует уменьшение угла между положительными направлениями осей, отрицательному — увеличение тех же углов. Углы сдвига, проектирующиеся на плоскость x y, обозначим ?xy (или ?yx). Соответственно для остальных плоскостей углы сдвига ?yz (или ?zy) и ?zx (или ?xz).
При элементарных деформациях первого рода (удлинение ребер) меняется объем параллелепипеда и его форма как показано на рисунке 1.2,а; а при деформациях второго рода (сдвиги) объем остается неизменным, изменяется лишь форма в соответствии с рисунком 1.2б.
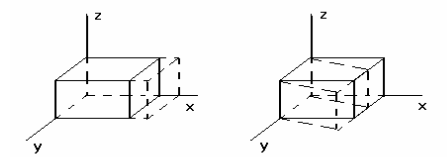
а) б) Рисунок 1.2 — Виды деформаций: а) удлинение ребер, б) сдвиг Рассмотрим сплошное твердое тело, прикрепленное к опорам таким образом, что оно не может перемещаться. Тогда перемещения любой точки этого тела могут произойти только в результате деформации этого тела. Обозначим U, V, W проекции полного перемещения некоторой точки на оси координат Ox, Oy, Oz и назовем их компонентами смещения. Компоненты смещения различны для различных точек и являются функциями координат точки:
U = f1(x, y, z), V = f2(x, y, z), W = f3(x, y, z).
Полное смещение точки определяется выражением.

.
Запишем дифференциальные уравнения равновесия в статическом (динамическом) виде:
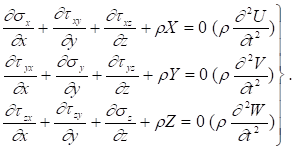
(1.1).
Здесь? — плотность вещества, X, Y, Z — проекции на соответствующие оси объемной силы, отнесенной к единице массы. Выражения в скобках для правой части используется в случае движения.
Перемещения определяются деформациями тела, эта зависимость выражается уравнениями:
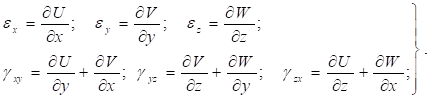
(1.2).
Эти уравнения называют геометрическими или уравнениями Коши.
Наличие всех компонентов напряжений, показанных на рисунке 1.1, определяет следующие составляющие деформации:
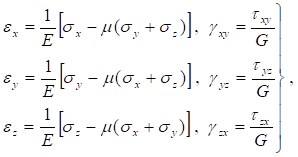
(1.3).
где — модуль упругости,.
? — коэффициент Пуассона,.

G — модуль сдвига, .
В этом виде обычно выражается закон упругости для изотропного тела. Его можно сформулировать так: компоненты тензора деформаций в данной точке находятся в линейной зависимости от компонентов тензора напряжений той же точки. Тензор напряжений имеет вид:
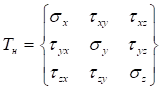
.
Соответственно тензор деформаций можно выразить в виде:
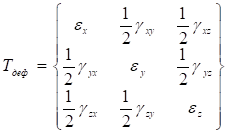
.
Закон упругого изменения объема можно представить в виде:

(1.4).
т.е. среднее напряжение в точке пропорционально объемной деформации в окрестности той же точки. Используя закон изменения объема и понятие о шаровых тензорах, можно записать:
(1.5).
т.е. шаровой тензор напряжений пропорционален шаровому тензору деформаций. Коэффициент пропорциональности (объемный модуль упругости) выражается в виде:
и определяет сопротивление материала при изменении объема, которое не сопровождается изменением формы. Систему зависимостей:
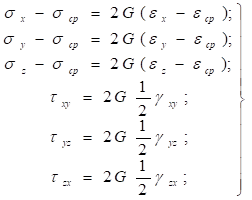
(1.6).
запишем в следующем виде:
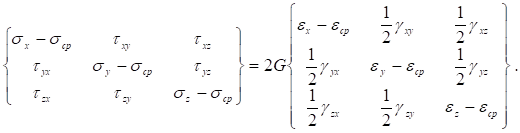
(1.7).
Левую матрицу, составленную из компонентов напряжений, называют девиатором напряжений Dн, а правую матрицу — соответственно девиатором деформации Dдеф. В связи с этим обобщенный закон упругости можно представить в виде:
(1.8).
и сформулировать так: девиатор напряжений прямо пропорционален девиатору деформаций.
Выражения (1.7) и (1.8) называют законом изменения формы.