Организация каналов связи в группе роботов
ИК-канал будет использоваться для передачи и приёма значений аналоговых характеристик сигналов. В качестве таких аналоговых характеристик сигнала мы выберем амплитуду А, частоту w и ширину t. Для того чтобы работать с этими величинами, разобьём диапазоны их возможных значений на интервалы и сопоставим этим интервалам лингвистические переменные. Пусть эти величины имеют по три градации на своих… Читать ещё >
Организация каналов связи в группе роботов (реферат, курсовая, диплом, контрольная)
Изучение решений по организации каналов связи в группе роботов показало следующее положение вещей. В настоящее время для коммуникации между роботами в основном используется радиоканал [6]: сети Wi-Fi, GPRS, Ad hoc и беспроводные сенсорные сети. Использование радиодиапазона в данной ситуации представляется нецелесообразным, т.к. радиоканал не обеспечивает направленной передачи сигнала (если не предпринимать специальных усилий). Из других способов организации каналов связи — звуковой канал и ИК-диапазон.
Применение звукового канала для обмена данными между роботами рассмотрено, например, в работе [11]. Авторы предложили формальную модель языка, в которой каждой букве русского алфавита соответствует последовательность мультичастотных акустических сигналов длительностью 150 мс. Данными являются слова русского языка из ограниченного словаря, передача данных происходит на частоте от 400 до 1100 КГц. В качестве другого примера использования звукового канала можно привести робота-игрушку Furby [2], в которой для обмена данными используется звук с частотной модуляцией в диапазоне около 20 КГц. Примеры использования звукового канала показывают, что звуковой канал имеет недостаточно высокую частоту для обеспечения необходимой скорости передачи данных. А переход в ультразвук повлечет за собой появление неприятных ощущений у тех, кто будет находиться в одном помещении с работающими роботами. Поэтому мы остановимся на ИК-диапазоне.
Воспользуемся для организации канала одним из наиболее распространенных протоколов обмена данными в ИК-диапазоне — протоколом RC-5. Данные по этому протоколу передаются пакетами по 14 бит. Подробное описание этого протокола можно найти, в частности, в [15]. Биты в пакете кодируются с помощью манчестерского (бифазного) кодирования. При частоте 36кГц один бит имеет длину 1,778 миллисекунд. Длина пакета составляет 24,889 мс. Минимальная пауза между пакетами — 88,889 мс (50 бит).
Время, в течение которого узлы (роботы) должны успеть передать информацию, определяется требованиями ко времени реакции роботов. Опыт работы с реальными устройствами показывает, что это время не должно превышать 0,2 секунды. Из этого можно заключить, что любое сообщение должно укладываться не более чем в 2 пакета. Длительность набора из 2-х пакетов — 24,889*2+88,889 = 138,667 (мс), что составляет примерно 0,139 с.
Для повышения надежности доставки сообщения будем использовать передачу контрольной суммы, основанной на циклически избыточном коде (Cyclic redundancy code, CRC). При использовании CRC-алгоритмов необходимо выбрать длину кодового слова W и делитель G (длиной W). Для длины кодовой последовательности 3 нет стандартных значений, поэтому мы воспользуемся рассуждениями по выбору делителя, приведенными в [8], и остановимся на делителе 101.
Общая структура набора пакетов приведена на рис. 2.
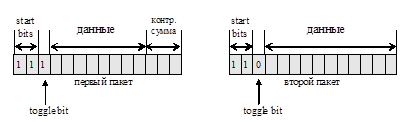
Рис. 2. Структура набора пакетов для передачи сообщений.
ИК-канал будет использоваться для передачи и приёма значений аналоговых характеристик сигналов. В качестве таких аналоговых характеристик сигнала мы выберем амплитуду А, частоту w и ширину t. Для того чтобы работать с этими величинами, разобьём диапазоны их возможных значений на интервалы и сопоставим этим интервалам лингвистические переменные. Пусть эти величины имеют по три градации на своих шкалах, например, (A1, A2, A3) = (высокая, средняя, низкая). Тогда значения этих лингвистических переменных можно упорядочить относительно друг друга:
A1 > A2 > A3.
Если мы говорим, что реакции особей (роботов) должны соответствовать принятым сигналам (может быть, неоднозначно и в зависимости от состояния особи и окружающей среды), то реакции также могут быть упорядочены относительно сигналов и друг друга:
A1 > A2 > A3
R1 > R2 > R3
где Ri — это реакции или наборы реакций, необязательно непересекающиеся. Если есть упорядоченность значений сигналов относительно друг друга, то можно ввести и упорядоченность разных сигналов относительно друг друга. В конце концов, особь не может выполнять все действия сразу и все равно выбирает самый важный сигнал из полученных и реагирует на него. Эта упорядоченность может быть учтена при работе с конкретными значениями сигналов, если они попадают на границу между значениями лингвистических переменных. Такой подход позволит не расписывать все возможные комбинации сигналов и реакции на них, а реагировать естественным образом в соответствии с ситуацией.
Теперь рассмотрим вопрос о возможной интерпретации сигналов (точнее, полученных значений). Если не привязываться к конкретной задаче, а приводить только общие соображения, то помимо информации, которую он несёт, можно выделить интенсивность этого сигнала. Достаточно естественным видится подход, при котором амплитуда А будет ассоциироваться с интенсивностью сигнала, а два оставшихся параметра будут отвечать за информационную часть.
Информационная часть определяет реакцию особи. А что может зависеть от интенсивности сигнала? Если проводить аналогию с поведением животных (да и человека тоже), то интенсивность (громкость, яркость) сигнала зачастую определяет интенсивность (скорость, завершенность) реакции на этот сигнал. Если животное получает «еле слышный» сигнал опасности, то оно может насторожиться и будет ждать подтверждения, может быть, слегка отойдет в сторону, противоположную той, откуда пришел сигнал. Если тот же сигнал будет «явно различим», т. е. будет исходить от близкого источника, то животное, вероятнее всего, будет спасаться бегством или предпринимать какие-то другие действия для своего спасения. Первая ситуация отличается от второй «интенсивностью действия» или степенью его завершенности.