Оснащение военного робота тактильными датчиками
Рисунок 3. Классификация объектов по жесткости с использованием тактильных датчиков и датчиков давления: Корендясев А. И., Саламандра Б. Л., Тывес Л. И. Теоретические основы робототехники; Книга 1; изд-во Наука, 2006. Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009. Момент изменения формы объекта под действием нарастающего усилия сжатия. Читать ещё >
Оснащение военного робота тактильными датчиками (реферат, курсовая, диплом, контрольная)
Оснащение военного робота тактильными датчиками
В настоящее время создание роботов способных уничтожать и обнаруживать взрывчатые устройства имеет большой успех. Это востребовано не только в нашей стране, но и во всем мире. В последнее время в нашей стране высокий риск терактов, поэтому мы создали робота, который справится с обнаружением и ликвидацией взрывчатых устройств.
Основным назначение робота является обследование местности, зданий, машин, стоянок для обнаружения взрывчатки. Мобильный робот имеет малые размеры, а также быстросъемные рабочие органы. На рисунке 1 представлен робот для обнаружения и обезвреживания взрывчатых устройств.
Робот оснащен камерой, манипулятором, сенсорами, гусеничной платформой, контейнером для помещения взрывчатки. Машина может передвигаться по слабопересеченной местности, преодолевать водные преграды и препятствия.

Рисунок 1. Робот для ликвидации взрывчатых устройств.
Манипулятор обладает несколькими степенями свободы и включает в себя механизмы гидродинамического разрушителя взрывчатого устройства и наведения видеокамеры. Обследователь труднодоступные места, находить и уничтожать объекты позволяет выдвижная телескопическая штанга. [3].
Уничтожение взрывчатого устройства производится с помощью гидродинамического выстрела, который превышает скорость детонирования, что позволяет избежать взрыва. Также робот имеет специальный контейнер, в который можно сбросить взрывчатое устройство, отвезти на безопасное расстояние и произвести подрыв.
При использовании манипулятора для захвата взрывчатых веществ, необходимо регулировать усилие схвата в зависимости от его свойств и массы. Для управления давлением усилия используются датчики в виде различных комбинаций пружин, потенциометров и трансформаторов. На рисунке 2 представлена схема датчика давления. Данные датчики содержат линейный потенциометр, подпружиненный шток, который может совершать возвратно-поступательные перемещения в подшипнике скольжения. Величина перемещения штока зависит от усилия захвата объекта, приложенного к верхней (рабочей) площадке, и жесткости пружины. Механическое перемещение преобразуется потенциометром в изменение величины электрического напряжения.
1-пружина; 2-подшипник скольжения; 3-потенциометр.
Классификация объектов по жесткости (рис. 3.) учитывает два фактора:
- 1) момент срабатывания тактильных датчиков;
- 2) момент изменения формы объекта под действием нарастающего усилия сжатия.
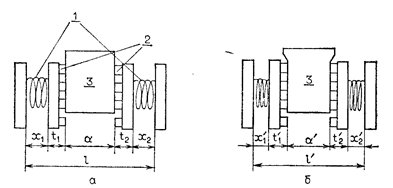
Рисунок 3. Классификация объектов по жесткости с использованием тактильных датчиков и датчиков давления:
1-пружина; 2-датчики тактильные; 3-объект.
В соответствии с рисунком 3 имеем:

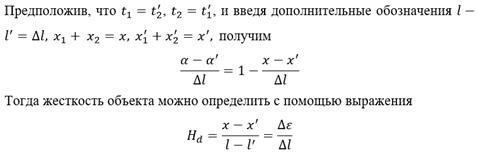
Во время захвата взрывчатого устройства, объект не подвергается сжатию, за счет того, что оно сжимаются только пружины в датчике.
Работа датчика основывается на эффекте изменения электрического сопротивления под действием давления. Электроды в этом случае размещаются либо на обеих поверхностях барочувствительного материала, либо только на нижней его поверхности.
Робот может зарекомендовать себя в реальных условиях эксплуатации, решает задачи, связанные с обнаружением и ликвидацией взрывчатых устройств. Датчик давления такой конструкции работает надежно и точно, и имеет сравнительно не большие массогабаритные характеристики. С помощью данного датчика робот стал наиболее функционален.
робот взрывчатый конструкция.
- 1. Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- 2. Корендясев А. И., Саламандра Б. Л., Тывес Л. И. Теоретические основы робототехники; Книга 1; изд-во Наука, 2006.
- 3. Закиров Е. А., Малёв М. В. Уничтожение взрывных устройств с помощью робота // Молодой ученый. — 2016. — № 12. — С. 278−280.