Математическая модель взаимодействия рабочего органа выкопочной машины с почвой и корнями растений

Взаимодействие рабочего органа с почвой сопровождается сложным процессом ее деформирования и разрушения структуры. Математическая модель напряжённо-деформированного состояния системы рабочий орган-почва должна учитывать сложную структуру почвы, её многофазность, наличие включений органической природы — корней растений, а также сложное реологическое поведение, как почвы, так и материала корней… Читать ещё >
Математическая модель взаимодействия рабочего органа выкопочной машины с почвой и корнями растений (реферат, курсовая, диплом, контрольная)
Разработана математическая модель взаимодействия рабочего органа выкопочной машины с почвой и корнями растений для оптимизации конструктивных параметров выкопочной машины Ключевые слова: ВЫКОПКА САЖЕНЦЕВ, МАТЕМАТИЧЕСКАЯ МОДЕЛЬ, ВЫКОПОЧНАЯ МАШИНА В процессе непрерывного движения лезвия рабочего органа выкопочной машины в почве происходит дискретный динамический процесс перерезания корешков саженцев. Данный процесс должен обеспечить качественное перерезание корешков с ровным срезом без их смятия, разрывов и размочаливания, при этом работа и сила резания почвы, а также крошение почвы должны быть по возможности минимальны. Кроме того, должна быть обеспечена устойчивость хода ножа, его жесткость, высокая износостойкость и способность к самозатачиванию.
Актуальной остается задача повышения эффективности работы выкопочной машины за счёт выбора геометрических характеристик рабочего органа, таких как угол заточки лезвия, угол резания, форма поверхности ковша и других. Для решения этой задачи может быть использован метод математического моделирования.
В [1] разработана математическая модель вибрационного процесса подрезки боковых корней сеянцев в питомниках, позволившая оптимизировать основные параметры корнеподрезчика с активным рабочим органом и снизить его энергозатраты. Уравнение движения рабочего органа здесь записано с учетом силы сопротивления резанию корня, а также усилия на штоке гидроцилиндра. В данной работе предложена математическая модель движения рабочего органа выкопочной машины, в которой рассмотрен более полный спектр сил сопротивления этому движению со стороны грунта и корней. Модель опирается на результаты широко известных исследований элементарных процессов резания и вдавливания [2−4]. выкопочный машина математический модель.
Постановка задачи. Движение основного элемента выкопочной машины — двуплечего рычага АОВ, представляет собой вращение вокруг неподвижной оси (рисунок 1). Уравнение движения рычага имеет вид.

(1).


где — момент инерции рычага относительно оси; - угол поворота; - сила давления, создаваемая в гидроцилиндре; - сила тяжести рычага; - главный момент сил сопротивления движению рабочего органа относительно оси, являющийся нелинейной функцией угла поворота .
Рассмотрим распределение сил сопротивления движению рабочего органа выкопочной машины. Выделим для отдельного изучения элементы рабочего органа (рисунок 1):
- — два режущих элемента (лезвия) в виде клиньев (р);
- — боковые стенки ковша (п);
- — рабочие поверхности ковша (к).
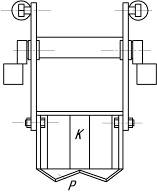
Рисунок 1 Схема рабочего органа


Условия механического взаимодействия элементов рабочего органа с почвой качественно различны. Для определения, изменяющего свое значение в процессе движения рабочего органа, необходимо исследовать:
- — сопротивление скользящего резания почвы с корнями растений в условиях изменяющихся угла резания и скорости скольжения;
- — сопротивление вдавливанию рабочего периметра ковша — его боковых стенок, не имеющих режущих кромок (резание пуансоном) с учётом переменной высоты заглубления полуковша;
- — сопротивление перемещению основания полуковша при изменяющихся величинах плотности и объёма призмы волочения.
Взаимодействие рабочего органа с почвой сопровождается сложным процессом ее деформирования и разрушения структуры. Математическая модель напряжённо-деформированного состояния системы рабочий орган-почва должна учитывать сложную структуру почвы, её многофазность, наличие включений органической природы — корней растений, а также сложное реологическое поведение, как почвы, так и материала корней. Контактная задача такого типа является весьма сложной и пока далека от разрешения. В инженерной практике силы сопротивления резанию, вдавливанию могут быть вычислены на основе эксперимента, в котором с учётом многих факторов определяется так называемое удельное сопротивление [2−4]. Этот подход использован при разработке модели.
(2).
где — толщина боковых стенок; - переменная длина части сечения стенки, находящейся в контакте с грунтом; - удельное сопротивление вдавливанию пуансона во взрыхленный грунт. Величина может быть получена из экспериментальных данных.
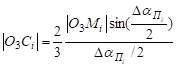
Вычислим текущее значение высоты в зависимости от положения рычага, определяемого углом. Для этого найдем координаты точек и (рисунок 2). Используя очевидные векторные равенства и, получим.
; (3).
. (4).

Здесь — расстояние от точки О на оси вращения рычага до поверхности почвы; , — геометрические характеристики рабочего органа. Таким образом, величина вычислена при любом положении рабочего органа относительно уровня почвы.
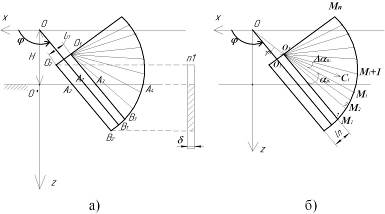
Рисунок 2 Схема для расчёта сопротивления боковых стенок полуковша.
Используя (2−4), получим величину силы давления на профиль боковой стенки полуковша. Момент этой силы относительно оси определим, учитывая, что угол мал:

(5).

,,. (6).
Из (5−6) видно, что момент сил сопротивления вдавливанию изучаемого профиля зависит от свойств грунта, глубины погружения рабочего органа и его размеров.


Отметим, что выражение для главного момента сил сопротивления должно содержать удвоенное значение осевого момента, поскольку у рабочего органа имеются две боковые стенки. Пренебрегая небольшим отклонением боковых стенок полуковша от вертикали, получаем нулевой момент силы давления грунта на внешней и внутренней поверхности боковых стенок.
Для вычисления главного момента сил трения на внешней боковой поверхности полуковша рассмотрим область, погруженную в почву (рисунок 2), обозначив точки разбиения на дуге полуковша. Боковая поверхность полуковша разбивается на секторы с углом при вершине.
Для любогого элемента разбиения сила сопротивления равна векторной сумме тангенциальной и нормальной составляющих.

. (7).
Величина, где — коэффициент трения скольжения пары грунт-металл. Если известна удельная сила давления на боковые стенки, то, вычислив — площадь элементарной ячейки разбиения, получим и .
Момент сил сопротивления приложенных кому элементу относительно оси равен.

(8).
где — расстояние от точки О до центра параллельных сил вой ячейке — точки приложения силы .
В (8) учтено, что вектор перпендикулярен, поскольку, с одной стороны, отрезок перпендикулярен вектору, где — скорость скольжения центраго элемента, с другой стороны, вектор параллелен вектору .

Вычислим величины и, полагая, что при достаточно большом числе элементов разбиения, каждый из них можно считать сектором круга с радиусом. Тогда площадь сектора.


. (9).
Радиус полуковша переменный, он определяется с использованием функции — индивидуальной характеристикой рабочего органа.
Координаты центра параллельных сил, приложенных кому элементу, можно получить, используя очевидные векторные равенства.
. (10).
Имеем.

; ;
; .



Величина .

Главный момент сил сопротивления боковых поверхностей полуковша равен. В алгоритме расчёта следует учесть, что формула (7) справедлива для элемента полностью погружённого в почву. Элементы, не имеющие контакта с грунтом, свободны от внешних усилий, здесь = 0 и. Приближенно будем полагать, что если, тоый элемент боковой поверхности полуковша, свободен от усилий (находится выше уровня почвы).

Сопротивление внутренней и внешней рабочей поверхности полуковша. Рассмотрим внутреннюю рабочую поверхность полуковша (рисунок 3а). Воспользуемся разбиением кривой, описанным выше. Построим элементы разбиения, имеющие в плане вид прямоугольников, если число элементов достаточно велико. Ширина этих прямоугольников или, а высота, совпадающая с .

Площадь элементов разбиения полуковша равна и. Сила сопротивления грунта элементу полуковша с номером может быть разложена на нормальную и касательную составляющие (рисунок 3б):

;, ,(11).
где — удельное сопротивление движению полуковша, — коэффициент трения металл-грунт.

Рисунок 3 К расчету сопротивления элементов внутренней и внешней рабочей поверхности полуковша: а) вид спереди; б) вид сбоку.

Сумму моментов сил нормального давления на внешней и внутренней поверхностяхго элемента полуковша можно приблизительно считать равной нулю, полагая (рисунок 3б).
Момент относительно оси силы определим следующим образом.

. (12).
Здесь , — координаты точки на поверхности полуковша, расположенной посередине между точками и. Текущее значение этих координат можно определить, используя соотношения.



(13).

. (14).
Проекции на оси координат имеют вид.

(15).

. (16).


Момент относительно оси силы трения скольжения, приложенной кму элементу внешней поверхности полуковша можно определить по формулам (12−16), при этом толщиной элементов по сравнению с плечом можно пренебречь.


Главный момент сил сопротивления движению полуковша должен содержать сумму моментов сил трения, приложенных к элементам, погруженным в почву, для которых справедливо условие. Следует учесть вклад сил сопротивления с внешней и внутренней стороны элементов трёх полос полуковша, так что в качестве в выражениях (15) и (16) должна фигурировать величина.

(17).
где — коэффициент трения скольжения металла о грунт с внутренней и внешней стороны полуковша, и — ширина полос полуковша, — удельная сила сопротивления движению полуковша.
Сопротивление лезвий с режущей кромкой. Рассмотрим процесс резания грунта клиновидным лезвием. Предположим, что главный вклад в величину момента сил сопротивления резанию дают нормальные компоненты сил, приложенные к режущей кромке резца, так что влиянием сопротивления на верхней и нижней фасках режущего элемента можно пренебречь.
На фаске лезвия лобовая сила сопротивления считается преобладающей, поэтому.

, (18).
где — сила сопротивления, приложенная к лезвию резца, — высота лезвия, — длина лезвия, — удельное сопротивление резания.
Величина удельного нормального сопротивления резанию из-за наличия корней саженцев изменяется вдоль лезвия.
Представим в виде функции.
. (19).
Здесь — единичная функция, принимающая значения либо 0, либо 1., если точка, принадлежащая лезвию с координатами, взаимодействует с почвой., если в данной точке лезвие контактирует с корнем саженца. Величины и представляют собой удельное сопротивление резанию при контакте лезвия с грунтом и корнем. Значения и зависят, как известно, от многих факторов.
В работах [2−6] показано, что на силу резания существенно влияет угол резания. Анализ опытных данных позволил автору работы [2] получить зависимость силы лобового сопротивления ножу от угла резания грунта.
Угол резания резца рабочего органа рассматриваемого типа в процессе выемки грунта не остается постоянным. Его значение можно определить из геометрических соображений, рассматривая треугольник (рисунок 4):
. (20).
По классификации процессов резания, предложенной академиком В. П. Горячкиным исследуемый процесс выкопки крупномерного саженца с комом почвы представляет собой резание со скольжением (лезвие перемещается не по направлению нормали к его кромке, а дополнительно смещается параллельно кромке) [3,6].

Рисунок 4 К определению угла резания рабочего органа.

Для характеристики процесса скользящего резания используется так называемый коэффициент скольжения, где и — тангенциальная и нормальная (по отношению к кромке лезвия) составляющие вектора скорости частицы лезвия. В работе [2,3,6] показано, что при изменении соотношения между нормальным и касательным перемещениями лезвия угол его заточки в направлении результирующего перемещения трансформируется. Чем больше, тем более значима трансформация угла заточки и тем меньше усилие резания.
Угол заточки также имеет важное значение для процесса резания. В [3] введено понятие коэффициента трансформации, как отношение разницы между исходным и трансформированным углами заточки к исходному углу заточки.

. (21).
Имеющиеся опытные данные, например, Т. И. Егоровой [3], позволяют получить аппроксимирующую зависимость нормальной силы резания от угла заточки и коэффициента скольжения, или от коэффициента трансформации и коэффициента скольжения. Примем, что удельное сопротивление резанию является функцией угла резания, угла заточки и коэффициента скольжения.
. (22).
В рассматриваемом процессе выкопки саженцев часть элементов лезвия разрезает корни, другая часть почву. Для моделирования этого процесса выполним разбиение фаски лезвия на N участков. Дляго участка () определим момент нормальной силы сопротивления резанию относительно оси, считая силу приложенной в центре режущей кромкиго участка.


(23).

где — координаты точки приложения силы , — вектор внешней нормали к плоскости лезвия.
Для того чтобы определить проекции вектора на оси координат в любой момент времени, составлено уравнение плоскости фаски лезвия в текущем положении (рисунок 5) в системе координат, оси которой параллельны осям неподвижной системы координат.

Рисунок 5 К расчёту проекций вектора единичной нормали к поверхности лезвия.

Для вычисления главного момента сил сопротивления к поверхности рассматриваемого лезвия относительно оси необходимо сложить выражения типа (23). Для остальных трёх кромок лезвий необходимо проделать аналогичные действия.
Удельное сопротивление резанию материалов грунта и корней растений различно, поскольку различны их физико-механические свойства. Для моделирования неоднородного и нестационарного поля сил сопротивления резанию предлагается расчётный алгоритм, учитывающий задаваемое случайным образом расположение элементов корневой системы саженцев.
Пусть прямоугольник (рисунок 6а) ограничивает участок, где происходит выемка грунта вместе с растением (вид сверху). Стороны этого прямоугольника, где — ширина ковша,, величина .

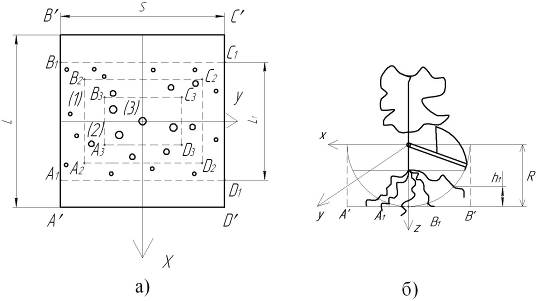
Рисунок 6 Схема участка грунта с корневой системой саженца — (а); зона среза корневой системы (б).
Для определённости предположим, что корни саженца располагаются, в основном, в зоне. Выделим внутри этой зоны три подобласти, в каждой из которых преобладают корни со средним значением диаметра, , (количество подобластей можно варьировать). При этом в зоне (3) —, как правило, располагаются корни более крупного диаметра, в зоне (2) — меньшего диаметра, в зоне (1) — мелкие корни диаметра. Предположим, что в зоне среза при (рисунок 6б) диаметр корня по высоте практически не изменяется.
Координаты центров поперечного сечения корней, где =1… могут быть заданы с помощью генератора случайных чисел для каждой из трёх зон участка .
Предположим, что момент резания корня наступает или продолжается при выполнении условия следующего вида.


, (24).

где — координаты центра поперечного сечения корня с номером; - текущие координаты центра участка с номером, расположенного на острие режущей кромки, полученного при разбиении отрезка точками,; - текущие координаты центра участка с номером i, расположенного на острие режущей кромки, полученного при разбиении отрезка точками, .
Для оценки условий типа (24) для обоих резцов необходимо определить закон движения точек () и (). Примем за полюс точку (рисунок 7б), расположенную на нижней поверхности резца. Точка — общая для двух резцов, она принадлежит плоскости симметрии рабочего органа. Координаты точки совпадают с координатами (рисунок 2).

,. (25).
Введем для удобства подвижную систему координат с осями, параллельными неподвижным осям. Используя очевидные векторные соотношения (рисунок 7а).

,, (26).
получим текущие координаты точек разбиения и на нижней грани резца в виде.

, .
,.




. (27).
Для второго резца, симметричного рассмотренному, координаты точек и связаны с координатами точек и следующим образом.

;; ;;; .
Таким образом, по заданному множеству, = 1,…, и геометрическим характеристикам резцов для любого положения рычага рабочего органа можно определить с использованием (24−26), осуществляет ли элемент лезвий срез корня растения, или он участвует в процессе резания почвы.






Рисунок 7 К расчёту координат центров отрезков разбиения режущих кромок лезвия: — нижняя грань резца.
Заключение
Предложенная математическая модель позволяет получить закон движения рычага выкопочной машины в зависимости от непрерывно изменяющихся условий взаимодействия рабочего органа с почвой и корнями растений. Для изучаемого рабочего органа выкопочной машины получены необходимые для исследования модели выражения главных моментов сил сопротивления
- — вдавливанию рабочего периметра полуковша;
- — перемещению внутренней и внешней рабочей поверхности полуковша;
- — резанию почвы и корней растений.
Величина сил сопротивления может быть определена на основе известных методик. Модель учитывает нестационарное и случайное распределение величины удельного сопротивления резанию вдоль кромки лезвия. Элементы лезвия могут находиться в контакте с материалом грунта и корня. Учтено, что четыре режущих кромки рабочего органа осуществляют скользящее резание.
Нелинейное дифференциальное уравнение (1) может быть решено с использованием численных методов. Анализ решения позволит усовершенствовать конструктивные элементы рабочего органа, а также выбрать наиболее энергоэффективные режимы работы выкопочной машины.
- 1. Драпалюк М. В., Попиков П. И., Кондратов М. В. Математическая модель процесса подрезки корней сеянцев и саженцев в питомниках // Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки. 2006. № 53. С. 111−114.
- 2. Ветров Ю. А. Резание грунтов землеройными машинами. М.: Машиностроение, 1971. 357 с.
- 3. Резник Н. Е. Теория резания лезвием и основы расчёта режущих аппаратов. М.: Машиностроение, 1975. 311 с.
- 4. Зеленин А. Н. Физические основы теории резания грунтов. Ленинград: Издательство академии наук СССР, 1950. 354 с.
- 5. Дорожные машины. Теория, конструкция и расчёт / Н. Я. Хархута, М. И. Капустин, В. П. Семенов, И. М. Эвентов. Л.: Машиностроение, Ленинград. отделение, 1976. 472 с.
- 6. Горячкин В. П. Собрание сочинений/ М.: Колос, 1968. 465 с.