Структурный и кинематический анализ механизма
Где Wп. — число степеней свободы для плоского механизма; II2 (2,3) — группа Ассура II класса 2-го вида 2-го порядка. Исследуемый механизм является механизмом II класса. Определяем степень подвижности механизма. Массы звеньев, кг кривошип шатун ползун. 0−3) — поступательная, низшая, V класса. Составим формулу строения механизма: Разделяем механизм на группы Ассура: 2−3) — вращательная, низшая… Читать ещё >
Структурный и кинематический анализ механизма (реферат, курсовая, диплом, контрольная)
1. Структурный анализ механизма
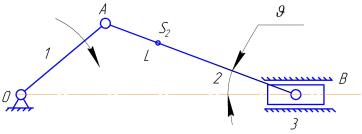
Рисунок 1 — План механизма.
Определяем степень подвижности механизма.
В нашем случае механизм плоский (траектории всех точек звеньев перемещаются параллельно плоскости). Поэтому степень подвижности находим по формуле Чебышева:
Wп. = 3n — 2P5 — P4,.
где Wп. — число степеней свободы для плоского механизма;
n=3 — число подвижных звеньев;
P5=4 — число пар 5-го класса;
P4=0 — число пар 4-го класса;
Wп. = 3•3 — 2•4 — 0 = 1,.
Определяем число избыточных связей Число избыточных связей q в действительном механизме равно:
Wпр. = 6n — 5P5 — 4P4 — 3P3 — 2P2 — P1,.
Wпр. = 6•3 — 5•4 = - 2.
q = 1 — (-2) = 3.
где Wпр. — число степеней свободы для пространственного механизма Определяем вид кинематических пар механизма:
- (0−1) — вращательная, низшая, V класса
- (1−2) — вращательная, низшая, V класса
- (2−3) — вращательная, низшая, V класса
- (0−3) — поступательная, низшая, V класса
Разделяем механизм на группы Ассура:
I (0,1) — начальный механизм.
II2 (2,3) — группа Ассура II класса 2-го вида 2-го порядка.
Составим формулу строения механизма:

Исследуемый механизм является механизмом II класса.
2. Кинематический анализ механизма
механизм структурный кинематический анализ Таблица 1. Исходные данные.
Параметр | Обозначение. | Величина. | |
Частота вращения кривошипа, об/мин. | n1 | ||
Длина кривошипа, м. | LОА | 0.125. | |
Длина шатуна, м. | LАВ | 0.6944. | |
Центр тяжести шатуна, м. | LAS2 | 0.24 305. | |
Массы звеньев, кг кривошип шатун ползун. | m1 m2 m3 |
| |
Момент инерции шатуна, кг· м2 | JS2 | 0.16. | |
Коэффициент неравномерности. | д. | 1/30. | |