Электроприводы с шаговыми двигателями
Основной режим работы ШД — динамический. ШД входит в синхронизм из состояния покоя и самотормозится. Поэтому в ШД обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую. Пуск ШД осуществляется скачкообразным или постепенным увеличением частоты входного сигнала до рабочей, торможение — снижением ее до нуля, реверс — изменением последовательности… Читать ещё >
Электроприводы с шаговыми двигателями (реферат, курсовая, диплом, контрольная)
Относятся к классу дискретного электропривода, совершают дозированные перемещения с фиксацией положения в конце движения. Хорошо сочетаются с цифровыми управляющими машинами и программными устройствами. Широко применяются в станках с ЧПУ, для роботов и манипуляторов.

Рис. 5.65
Шаговый двигатель (ШД) — синхронный двигатель, однако, магнитное поле вращается в воздушном зазоре дискретно (шагами) за счет импульсного возбуждения обмоток с помощью электронного коммутатора. Ротор, как правило, постоянный магнит (двухполюсный) называется активным. На рис. 5.65 представлена схема шагового двигателя с активным ротором.
При подаче импульса напряжения на обмотку 1Н-1К. ротор занимает вертикальное, при питании обмотки 2Н-2К — горизонтальное положение, обеспечивая шаг, равный 90°. Положение будет устойчивым, так как при отклонении от него на ротор действует синхронизирующий вращательный момент  ', где в — угол между осями магнитных полей статора и ротора. Если подавать импульсы напряжения на обе обмотки одновременно, то ось магнитного поля статора будет расположена под 45°.
', где в — угол между осями магнитных полей статора и ротора. Если подавать импульсы напряжения на обе обмотки одновременно, то ось магнитного поля статора будет расположена под 45°.
Ротор при этом повернется на 45°, чтобы максимальное поле его пересекало. Если снять напряжение с обмотки 1Н-1 К, ротор станет горизонтально (следующий шаг), затем, поменяв полярность напряжения, ось магнитного поля переместится еще на 45° и т. д. (эта схема называется несимметричной).
Угловое перемещение шагового двигателя определяется.
 (5.31).
(5.31).
где  - число пар полюсов ротора; п — число переключений (тактов) в цикле, равное числу фаз ШД при симметричной коммутации и удвоенному числу фаз при несимметричной коммутации.
- число пар полюсов ротора; п — число переключений (тактов) в цикле, равное числу фаз ШД при симметричной коммутации и удвоенному числу фаз при несимметричной коммутации.
Шаговое перемещение ротора осуществляется с помощью подачи импульсов с переключением обмоток (один такт коммутации — один шаг ротора). Суммарный угол поворота ШД пропорционален числу импульсов, а его скорость — частоте импульсов, амплитуда и форма импульсов могут быть различными. Для реверса ШД нужно включить на обратную полярность обмотку, которая в данный момент отключена, тогда ротор сделает шаг в другую сторону.
Основной режим работы ШД — динамический. ШД входит в синхронизм из состояния покоя и самотормозится. Поэтому в ШД обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую. Пуск ШД осуществляется скачкообразным или постепенным увеличением частоты входного сигнала до рабочей, торможение — снижением ее до нуля, реверс — изменением последовательности коммутации обмоток ШД.
По конструкции ШД могут быть однофазными, двухфазными, многофазными, с активным или пассивным ротором. Активный ротор выполнен в виде постоянных магнитов или с обмоткой возбуждения, как у СД (магнитоэлектрические шаговые двигатели). Такие ШД имеют крупный шаг ротора от 90 до 15°. Для уменьшения шага увеличивают число фаз и такгов коммутации, а также используют двухстаторную или двухроторную конструкцию.
Максимальная частота управляющих импульсов, при которой возможен пуск ШД из неподвижного состояния без выпадения из синхронизма (пропуска шагов) называется частотой приемистости. Чем выше электромагнитная и механическая инерция ШД и больше момент нагрузки, тем меньше частота приемистости.
Максимальная скорость ШД с активным ротором составляет 208−314 р/с, частота приемистости от 70 до 500 Гц, номинальный вращающий момент от 1010 6 до 1010 ' Н м. Для больших частот приемистости используются ШД с пассивным ротором, которые делятся на реактивные и индукторные. Ротор выполнен из ферромагнитного материала, не имеет обмоток (пассивный). На статоре зубцы  (явновыраженные полюсы) с обмотками, на роторе зубцы
(явновыраженные полюсы) с обмотками, на роторе зубцы  без обмоток.
без обмоток.
Если  , то при каждом переключении обмоток статора ротор совершает поворот (шаг) а, равный.
, то при каждом переключении обмоток статора ротор совершает поворот (шаг) а, равный.
 (5.32).
(5.32).
Уменьшив разность  , можно снизить шаг ротора. ШД с пассивным ротором (Ш, ШДР, ШР, РШД) имеют шаг от 1,5 до 9°, момент
, можно снизить шаг ротора. ШД с пассивным ротором (Ш, ШДР, ШР, РШД) имеют шаг от 1,5 до 9°, момент  Н м, частоту приемистости от 250 до 1200 Гц.
Н м, частоту приемистости от 250 до 1200 Гц.
Рассмотрим схемы управления дискретным электроприводом.
На обмотки статора ШД подается определенная последовательность импульсов напряжения. Средняя скорость ШД зависит от частоты коммутации обмоток  :
:
 (5.33).
(5.33).
которая выдается электронным коммутатором и изменяется в широких пределах. Коммутатор является преобразователем частоты (ПЧ), а дискретный электропривод — системой с частотным управлением ШД.
На рис. 5.66 представлена структурная схема электропривода с ШД, где БЭДШ — блок электронного дробления шага; БПРТ — блок плавного разгона и торможения; БП — блок питания; ЧИРН — частотно-импульсный регулятор напряжения; ФИ — формирователь импульсов; РИ — распределитель импульсов; ПУ — промежуточный усилитель; К — коммутатор (ПЧ); УОС — усилитель обратной связи; ДП — датчик положения и скорости; ЦР — цифровой регулятор.

Рис. 5.66
Сигнал управления  в виде импульсов напряжения поступает на вход ФИ, который формирует импульсы по длительности и амплитуде, РИ — преобразует сформированные импульсы в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз обмоток двигателя.
в виде импульсов напряжения поступает на вход ФИ, который формирует импульсы по длительности и амплитуде, РИ — преобразует сформированные импульсы в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз обмоток двигателя.
Усиленные с помощью ПУ импульсы поступают на коммутатор для питания обмоток ШД. Обычно коммутатор питается от источника постоянного тока. На рис. 5.67 представлена схема тиристорного коммутатора.
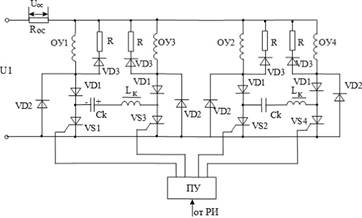
Рис. 5.67
Тиристоры VSI-VS4 обеспечивают парную коммутацию обмоток ШД, в каждый момент включены две обмотки из 4-х, (четырехфазная схема); VSI и KS3; VS2 и VS4 образуют схемы двух триггеров, в которых переключение тиристоров осуществляется колебательными контурами 
Допустим, в исходном положении тиристор KS1 открыт и по обмотке ОУ протекает ток, а тиристор KS3 закрыт. Если подать импульс управления на KS3, то он откроется, по обмотке ОУ5 начнет проходить ток. Одновременно начнется перезаряд конденсатора  и тиристор VS закроется, так как потенциал катода станет более положительным, чем потенциал анода. Тиристоры VS и KS3 работают в схеме триггера попеременно.
и тиристор VS закроется, так как потенциал катода станет более положительным, чем потенциал анода. Тиристоры VS и KS3 работают в схеме триггера попеременно.
Колебательный контур  и диоды VD1, VD2 производят переключение тиристоров в схемах триггеров.
и диоды VD1, VD2 производят переключение тиристоров в схемах триггеров.
Аналогично работает триггер на тиристорах VS2 и KS4. Для снятия перенапряжений используется цепь, R-VD3.
Замкнутая схема (рис. 5.66) с отрицательной обратной связью по току осуществляет автоматическую стабилизацию тока в обмотках, сигнал  снимается с резистора
снимается с резистора  . Разность сигналов
. Разность сигналов  и задающего U, образует сигнал управления, который подается на вход усилителя обратной связи УОС.
и задающего U, образует сигнал управления, который подается на вход усилителя обратной связи УОС.