Вращающиеся трансформаторы и резольверы, линейные и круговыр индуктосины
Отдельным видом систем дистанционного отсчета являются устройства цифровой индикации (УЦИ). Как правило, они шестиразрядные и базируются на циклических (фазовых) датчиках положения. По способам формирования показаний младшего разряда эти устройства аналогичны рассмотренным выше. Различие состоит в способах формирования показаний старших разрядов. В младших разрядах обычно используют датчики типа… Читать ещё >
Вращающиеся трансформаторы и резольверы, линейные и круговыр индуктосины (реферат, курсовая, диплом, контрольная)
Для построения систем числового программного управления станками (систем ЧПУ), которые преобладают в большинстве технологических процессов в механообработке, существенным является получение данных об истинном положении рабочих органов станка. Числовое программное управление координатными перемещениями с достижением при этом необходимой точности обеспечивается благодаря соответствующим устройствам обратной связи по положению, объединяемых общим названием «системы дистанционного отсчета». Такие системы могут использовать и датчики абсолютного отсчета, и циклические датчики.
Для абсолютного отсчета в основном используются круговые кодовые датчики положения. Применяемые при этом принципы построения кодовых масок более подробно будут рассмотрены в дальнейшем. Системы же, выдающие информацию по одному каналу в виде серии импульсов, число которых пропорционально величине перемещения (это называется унитарным кодом), применяют главным образом циклические датчики.
Среди аналоговых датчиков, используемых как для абсолютного, так и для циклического отсчета, наиболее распространены фазовые датчики положения. Устройством, служащим для преобразования угла поворота одной катушки по отношению к другой в сдвиг фазы одного переменного синусоидального напряжения по отношению к фазе другого переменного синусоидального напряжения такой же частоты, является так называемый вращающийся трансформатор.
Вращающийся трансформатор представляет собой индукционную микромашину по типу Двухфазного асинхронного двигателя с фазным ротором. Синусно-косинусный вращающийся трансформатор называется также резольвером. В нем на статоре и на роторе имеется по две одинаковые обмотки, конструктивно расположенные взаимно перпендикулярно. На пару статорных обмоток подаются два одинаковых синусоидальных опорных напряжения, сдвинутых по фазе на 90°. Иными словами, если одно из этих напряжений изменяется во времени по закону синуса, то другое изменяется во времени с той же частотой по закону косинуса. Такой сдвиг фаз можно получить, например, подавая второе из двух переменных гармонических напряжений через электрическую емкость. В результате взаимодействия векторов напряженности магнитных полей обеих статорных обмоток возникает вращающееся магнитное поле, т. е. поле, напряженность которого представляет собой вектор, постоянный по модулю, но вращающийся относительно центра статора с угловой частотой, равной частоте опорного переменного тока. В обмотках ротора тогда индуцируется ЭДС такой же частоты, но сдвинутая по фазе относительно опорного напряжения на величину, определяемую углом поворота ротора относительно статора.
Характерным примером аналогового фазового датчика, применяемого в станках с числовым программным управлением, может служить круговой (обычно пятидекадный) абсолютный датчик положения с измеряемым перемещением до 10 000 мм. В таком датчике с помощью измерительной зубчато-реечной пары приводятся во вращение так называемые бесконтактные сельсины. Между сельсинами соседних десятичных разрядов устанавливаются точные редукторы с передаточным отношением.
10. Более точным, без дополнительных кинематических погрешностей, возникающих в зубчатой реечной передаче, является измерение положения рабочего органа станка с помощью бесконтактных линейных сельсинов. Пример такого сельсина показан на рис. 6.10. Этот сельсин состоит из рейки Р и измерительной головки Г' устанавливаемых соответственно на неподвижном и перемещаемом узлах станка. Рейка выполняется из стали и имеет зубцы прямоугольного профиля с шагом ?р. Измерительная головка представляет собой участок аналогичной рейки с зубьями такого же прямоугольного профиля, шаг которых отли;
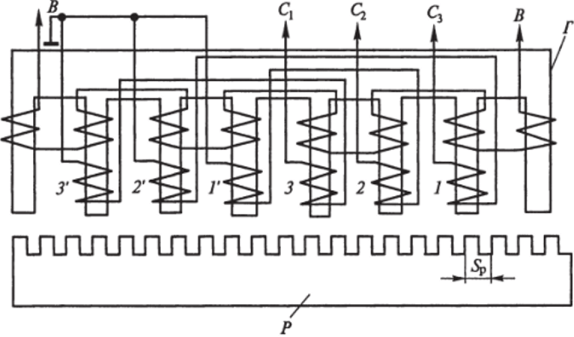
Рис. 6.10. Схема бесконтактного линейного сельсина чается от 3Sp на 1/6 (на половину одной фазы питающего трехфазного напряжения).
На измерительной головке Г имеется трехфазная обмотка, соединенная по схеме «звезда» (С, —> 1 —- Г; С2 2 — 2'; С3 3 — 3'). Каждая фаза охватывает третий по счету зубец. Кроме того, на зубцах головки имеется однофазная обмотка В, намотанная таким образом, что ее направления на соседних зубцах противоположны. Размеры окна, толщина зубца и зазор между зубцами рейки и головки таковы, что при перемещении головки относительно рейки магнитная проводимость каждого из ее зубцов меняется по закону, приближающемуся к синусоидальному.
При подаче на обмотку В синусоидального напряжения с амплитудой Е^лс и перемещении головки на величину X в фазах С" С2 и С, индуцируются гармонические ЭДС, амплитуды которых изменяются по косинусоидальному закону, а именно:
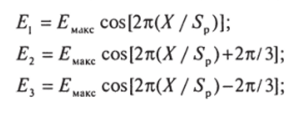
Фаза этих напряжений изменяется на 180е при переходе головки через нулевое положение. Режим работы сельсина, при котором выходом является трехфазная обмотка, называется трансформаторным.
При подаче опорного трехфазного напряжения в трехфазную обмотку головки образуется бегущее магнитное поле, а в однофазной обмотке головки индуцируется ЭДС, фаза которой по отношению к опорному напряжению изменяется пропорционально перемещению X:

Режим работы сельсина, при котором выходом является его однофазная обмотка, называется режимом фазовращателя.
Другим распространенным типом датчиков, используемых для измерения программируемых координатных перемещений в станках с ЧПУ, являются так называемые линейные и круговые индуктосины.
Линейный индуктосин состоит из двух шкал, одна из которых устанавливается на подвижном, а другая на неподвижном узлах станка. Шкалы представляют собой пластины из электроизоляционного материала (обычно гетинакса или текстолита), на которые фотопечатным способом нанесены обмотки прямоугольной формы, как показано на рис. 6.11. На одной из шкал имеется одна обмотка / с шагом S, а на другой размещаются две расположенные навстречу друг другу обмотки 2 и 3 с тем же шагом S, но сдвинутые друг по отношению к другу на величину 5/4. При подаче на обмотки 2 и 3 синусоидальных напряжений, сдвинутых по фазе друг относительно друга на 90°, образуется бегущее магнитное поле, и в обмотке 1 индуцируется ЭДС, фаза (р которой оказывается пропорциональной перемещению X шкалы:

Отдельным видом систем дистанционного отсчета являются устройства цифровой индикации (УЦИ). Как правило, они шестиразрядные и базируются на циклических (фазовых) датчиках положения. По способам формирования показаний младшего разряда эти устройства аналогичны рассмотренным выше. Различие состоит в способах формирования показаний старших разрядов. В младших разрядах обычно используют датчики типа сельсинов, в том числе и резольверы. Принцип работы подобного УЦИ состоит в следующем. Измеряется разность фаз между опорным сигналом (напряжением) и выходным сигналом датчиков младших разрядов. Затем интервал времени, соответствующий этой разности, преобразуется в соответствующую дис;
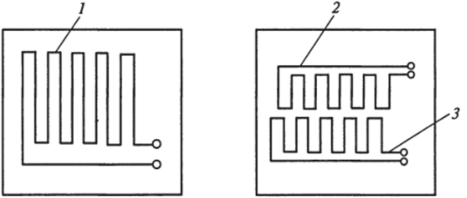
Рис. 6.11. Схема линейного индуктосина кретную величину (производится так называемая операция квантования). Эта дискретная величина имеет вид числа, изображенного тем или иным кодом, который записывается в один или два младших разряда УЦИ. После этого формируются показания старших разрядов УЦИ. Это делается путем подсчета (с помощью реверсивных счетчиков) числа совпадений фаз опорного сигнала и выходного сигнала датчика. Обычно такое совпадение происходит через каждый миллиметр перемещения узла станка, тогда как доли миллиметра регистрируются в младших разрядах УЦИ.
Основными компонентами УЦИ являются:
- • блок опорного сигнала, генерирующий сигналы прямоугольной формы с рядом фиксированных частот; из этих сигналов формируется трехфазное напряжение для управления сельсином, а также для управления вводом и выводом информации;
- • блок согласования, осуществляющий квантование непрерывно изменяющейся разности фаз на выходе датчика, т. е. преобразование непрерывно изменяющегося сигнала в электрическое напряжение, изменяющееся скачкообразно;
- • блок формирования, осуществляющий формирование базы отсчета (т. е. начального значения показаний) и импульсов отсчета целых шагов (миллиметров), выдачу этих импульсов на блок реверсивных счетчиков старших разрядов УЦИ и определение знака направления перемещений узла станка, а также выполняющий и некоторые другие функции.
Устройства подобного типа используются как автономно для цифровой индикации положения рабочих органов на станках с ручным управлением, так и для управления приводами в режиме позиционирования на станках с ЧПУ. На основе этих же принципов с использованием линейных либо круговых датчиков обратной связи создают следящие электроприводы с цифровым управлением.