Антропометрические характеристики человека
Ножные органы управления используют при необходимости больших усилий (20—80 Н м) при невысокой точности (включение-выключение, грубая регулировка механизмов и т. п.). Прикладывание некоторых усилий при управлении обязательно, так как их отсутствие (например, при сенсорном управлении) дезориентирует человека и лишает его уверенности в правильности своих действий. Зона 1 является самой… Читать ещё >
Антропометрические характеристики человека (реферат, курсовая, диплом, контрольная)
Антропометрические характеристики (АХ) — это размеры (линейные, угловые, параметрические) тела человека и его отдельных частей. Они зависят от пола, возраста, профессии, этнонациональной принадлежности, социальных и других факторов и используются для проектирования наиболее рациональных, а значит, и безопасных условий труда.
Антропометрические характеристики подразделяют на динамические и статические (рис. 2.5).
Динамические АХ (углы вращения в суставах, зоны досягаемости, эффекты от движения тела) используют для определения объема рабочих движений, зон досягаемости и видимости, по которым рассчитывают пространственную организацию рабочего места (табл. 2.1, рис. 2.6).
Статические АХ — это размеры, полученные в статическом положении человека, сохраняющего при измерениях одну и ту же установленную позу. Эти размеры используются для установления конструктивных параметров рабочих мест, определения диапазона изменения в случае их регулировки и т. д., и могут быть дуговыми и линейными. Линейные делятся на продольные (высота различных точек над полом или сиденьем), поперечные (ширина плеч, таза и т. п.), переднезадние (передняя досягаемость руки и др.). Последние две группы линейных АХ также называются диаметрами.

Рис. 25. Классификация антропометрических характеристик.
Таблица 2.1
Размеры зоны досягаемости рук человека, мм
Номер позиции на рис. 2.6. | В вертикальной плоскости. | В горизонтальной плоскости. | ||
для женщин. | для мужчин. | для женщин. | для мужчин. | |
—. | —. | |||
Выбор минимальных и максимальных значений антропометрических характеристик определяется характером выполняемой рабочей операции или параметрами приспособления (при необходимости до чего-то дотянуться руководствуются минимальными значениями, а при определении размеров сиденья, высоты ниши для ног и т. п. — максимальными).
Одним из показателей тяжести трудового процесса является рабочая поза. Условием правильно выбранной рабочей позы следует считать, что расположение проекции общего центра тяжести человека лежит в пределах площади опоры.

Рис. 2.6. Зоны досягаемости (1—8) рук человека в вертикальной плоскости В полной мере этому соответствует рабочая поза «сидя» (рис. 2.7, б), когда уменьшается высота центра тяжести над точкой опоры, благодаря чему возрастает устойчивость тела и значительно сокращаются энергозатраты организма. Остальные позы (рис. 2.7, а, в, г) не удовлетворяют этому требованию, так как проекция центра тяжести в этих случаях выходит за границы площади опоры, что вызывает рост энергозатрат на их поддержание.
Следует иметь в виду, что если при прямой позе «сидя» энергозатраты принять за единицу, то при прямой позе «стоя» они составят 1,6; при наклонной нозе «сидя» — 4, а при наклонной позе «стоя» — 10. Статичная поза утомительнее, чем динамическая.
Важными обстоятельствами при выборе рабочей позы являются также:
- • размеры рабочей зоны и эргономические аспекты рабочих мест;
- • степень подвижности рабочего, обусловленная характером и конкретным содержанием технологического процесса;
- • применяемое усилие в процессе работы.
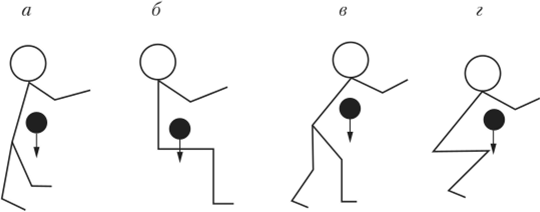
Рис. 2.7. Схема биомеханического анализа рабочей позы «стоя» (а, в) и «сидя» (б, г) при устойчивой (а, б) и неустойчивой.
(в, г) позах Правильно споектированная рабочая зона соответствует оптимальному полю зрения рабочего и определяется дугами, которые может описать рука, поворачивающаяся в плече или в локте на уровне рабочей поверхности. Поэтому рабочую зону, удобную для действия обеих рук, нужно обязательно совмещать с зоной, удобной для охвата человеческим взором. На рис. 2.8 представлены структурные схемы рабочих зон: а — при позе «сидя» в горизонтальной плоскости; б — при позе «стоя» в вертикальной плоскости.
Зона 1 является самой благоприятной, поскольку она наиболее применима для точных и мелких сборочных работ, так как в ней работают обе руки и хорошо осуществляется зрительный контроль. В случае оперативной работы в этой зоне следует разместить органы управления и индикаторы, которыми оператору придется пользоваться наиболее часто, интенсивно и быстро.
Зоны 2 и 3 хорошо доступны для одной и мало доступны для другой руки; зрительный контроль осложнен. В этих зонах удобно размещать инструменты и материалы, которые рабочий часто берет правой (левой) рукой, или органы управления, зрительный контроль за которыми не требуется постоянно.
Зона 4 (запасная) — труднодоступная зона; в ней могут быть размещены инструменты и материалы, которые не поместились в зонах 2 и 3.
Зона 5 (зона 6) доступна только для правой (левой) руки; здесь можно разместить инструменты и материалы, которые употребляются изредка, например, измерительные инструменты, или органы управления, которыми пользуются «не глядя».

Рис. 2.8. Структурные схемы рабочих зон 38.
При необходимости смены поз в процессе работы следует, но возможности сохранять одинаковое положение рабочего по отношению к рабочей поверхности, создавать необходимые условия свободного перехода от одной позы к другой за счет выбора наиболее рациональных геометрических размеров рабочей поверхности и средств перемещения.
В соответствии с рабочими зонами и антропометрическими характеристиками проектируются машины и механизмы, обслуживаемые человеком. Предпочтение при этом следует отдавать более точным ручным органам управления с обязательным приложением некоторых усилий в пределах 3—16,7 Н м. В этом случае максимальные усилия стоящим оператором прилагаются на уровне плеча, а сидящим — на уровне локтя, поэтому органы управления, которые используются наиболее часто, следует располагать на высоте между локтем и плечом.
Ножные органы управления используют при необходимости больших усилий (20—80 Н м) при невысокой точности (включение-выключение, грубая регулировка механизмов и т. п.). Прикладывание некоторых усилий при управлении обязательно, так как их отсутствие (например, при сенсорном управлении) дезориентирует человека и лишает его уверенности в правильности своих действий.
Форма и размеры органов управления должны быть согласованы с размерами и биомеханическими особенностями руки оператора. Для исключения биомеханической перегрузки следует придерживаться соответствия управляющего воздействия на оборудование биомеханическим возможностям человека, приведенными ниже, Н, для мужчин (числитель) и женщин.
(знаменатель):
кисть (сжатие динамометра):
правая рука…38,6/22,5.
левая рука…36,2/20,4.
бицепс:
правая рука …27,9/13,6.
левая рука…26,8/13,0.
кисть (сгибание):
правая рука …27,9/21,7.
левая рука…26,6/20,7.
кисть (разгибание):
правая рука …11,9/9,0.
левая рука…10,9/8,3.
стан (мышцы, выпрямляющие согнутое туловище)…123,1/71,0.