Электромеханические и механические характеристики двигателя постоянного тока последовательного возбуждения
Регулирование магнитного потока двигателя постоянного тока последовательного возбуждения возможно путем шунтирования обмотки возбуждения. На рисунке 2.19 представлены электрическая схема включения ДПТ ПВ при шунтировании обмотки возбуждения (а) и механические характеристики при различных сопротивлениях /?ш1 и Rmi (б). При активном статическом моменте Мся путем введения большого добавочного… Читать ещё >
Электромеханические и механические характеристики двигателя постоянного тока последовательного возбуждения (реферат, курсовая, диплом, контрольная)
Общие сведения.
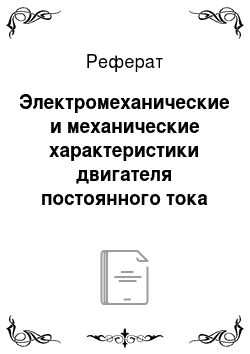
У двигателей постоянного тока последовательного возбуждения (ДПТ ПВ) обмотку якоря и обмотку возбуждения включают последовательно (рис. 2.16). Вследствие чего с изменением тока нагрузки меняется и магнитный поток Ф. А поскольку зависимость кривой намагничивания Ф = J[I) нелинейная (рис. 2.17), то аналитического выражения электромеханическая и механическая характеристики не имеют.
В связи с тем что физические процессы, протекающие в ДПТ последовательного возбуждения, аналогичны ДПТ независимого.
Рис. 2.16. Схема включения двигателя постоянного тока последовательного возбуждения
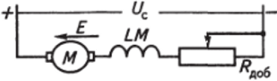
возбуждения, механическую и электромеханическую характеристики двигателя постоянного тока последовательного возбуждения описывают теми же уравнениями, что и для двигателя постоянного тока независимого возбуждения (2.11 и 2.12) с той лишь разницей, что поток Ф — функция тока якоря (см. рис. 2.17), а сопротивление якорной цепи R& — сумма сопротивлений обмотки якоря и обмотки возбуждения.
Для построения естественных механической и электромеханической характеристик используют универсальные рабочие характеристики (рис. 2.18).
Среди универсальных рабочих характеристик уже имеется электромеханическая характеристика со = Д/я), а для расчета механической характеристики со =/(Л/) используют зависимость Л/=/(/я). При аппроксимации кривой намагничивания линейной зависимостью в области малых значений /я(/я < 0,3/н) электромеханическая и механическая характеристики имеют вид гиперболической зависимости, асимптота которой совпадает с осью скоростей.

где а'— коэффициент аппроксимации кривой намагничивания, определяемый углом наклона между касательной к кривой намагничивания и осью абсцисс; с — конструктивная постоянная.
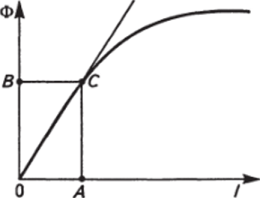
Рис. 2.17. Кривая намагничивания двигателя постоянного тока
Рис. 2.18. Универсальные рабочие харак тернстики ДПТ ПВ:
Л/, (о, / — в относительных единицах Поэтому необходимо помнить, что двигатель постоянного тока последовательного возбуждения нельзя включать в сеть без нагрузки, так как угловая скорость двигателя стремится к бесконечности (см. рис. 2.18).
Искусственные характеристики ДПТ ПВ можно получить следующими способами:
введение
м в цепь якоря добавочного сопротивления /?доб (реостатные характеристики);
изменением подводимого напряжения ?/с;
изменением магнитного потока Ф.
Для построения искусственных характеристик первыми двумя способами применяют уравнение (2.32).

где = /?, + /?"; Яя, — соответственно сопротивления обмоток якоря и возбуждения.
Задаваясь несколькими значениями значений /я, по характеристике со = /(/я) находят значения Юе, которые подставляют в уравнение (2.32) при заданном внешнем сопротивлении /?доб, напряжении Uc и определяют скорость со,.
Регулирование магнитного потока двигателя постоянного тока последовательного возбуждения возможно путем шунтирования обмотки возбуждения. На рисунке 2.19 представлены электрическая схема включения ДПТ ПВ при шунтировании обмотки возбуждения (а) и механические характеристики при различных сопротивлениях /?ш1 и Rmi (б).
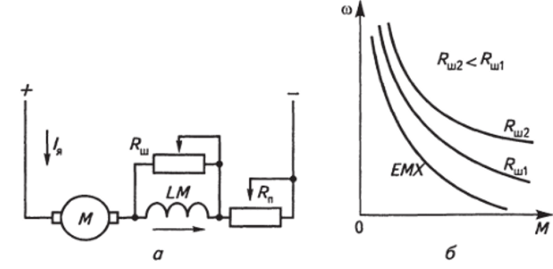
Рис. 2.19. Схема включения ДПТ ПВ (а) и механические характеристики (б) при шун тировании обмотки возбуждения:
— сопротивление шунта; — сопротивление последовательного резистора Режимы торможения ДПТ ПВ. Для этого двигателя возможны два вида электрического торможения:
- 1) динамическое;
- 2) торможение противовключением.
Рекуперативное торможение невозможно, поскольку ДПТ ПВ не имеет частоты вращения идеального холостого хода coq;
Динамическое торможение с независимым возбуждением выполняют путем ограничения тока в обмотках якоря и возбуждения добавочными резисторами Лдт1 и Лд т2 по схеме, приведенной на рисунке 2.20, а.
Недостаток динамического торможения с независимым возбуждением ДПТ ПВ — потребление из сети мощности, близкой к номинальной. Сопротивление ограничения Лд т2, включенное последовательно с обмоткой возбуждения, в режиме динамического торможения обычно выбирают из условия, чтобы ток в обмотке возбуждения не превышал номинального значенияд.т2 = {UJI") ~ К
Торможение противовключением ДПТ ПВ достигается в двух случаях.
1. При активном статическом моменте Мся путем введения большого добавочного сопротивления Л,. п1 (рис. 2.21). В результате уменьшается ток в цепи якоря, а следовательно, момент двигателя. Последний начинает снижать угловую скорость до со = 0 (точка С), а затем якорь изменяет направление вращения (см. рис. 2.21, кри;
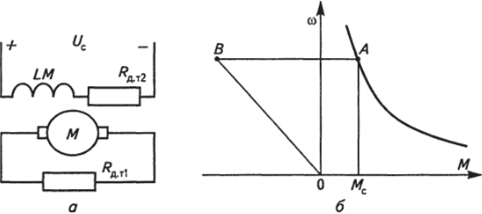
Рис. 2.20. Схема (а) и механические характеристики (б) ДПТ ПВ в режиме динамического торможения.
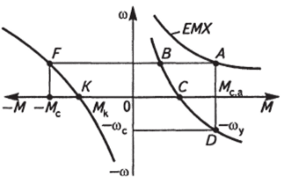
Рис. 2.21. Мехавические характеристики ДПТ ПВ в режиме торможения противовключением вая CD). При равенстве моментов М = МС наступает установившийся режим вращения якоря с угловой скоростью —со,. = — ay Кривая CD соответствует режиму торможения противовключением.
2. При реактивном статическом моменте Мс путем изменения полярности напряжения на зажимах якоря двигателя, оставляя неизменным направление тока в обмотке возбуждения (во избежание перемагничивания машины). Для ограничения тока в цепи якоря в режиме торможения противовключением вводят добавочное сопротивление п, поскольку в этом случае ЭДС и напряжение сети имеют одинаковую полярность,.

Торможение противовключением в этом случае происходит по характеристике FK Из-за зависимости магнитного потока от тока якоря ДПТ последовательного возбуждения обладают повышенными пусковыми и перегрузочными способностями.