Колебания и динамическая устойчивость синхронной машины
Отметим, что с помощью уравнений (5.52) и (5.54) можно также анализировать процесс вхождения в синхронизм, например, когда синхронный. двигатель запускается как асинхронный и при достижении подсинхронной скорости подается питание в обмотку возбуждения. При определенных условиях под действием синхронного момента машина втягивается в синхронный режим. В рассматриваемом случае решение задачи должно… Читать ещё >
Колебания и динамическая устойчивость синхронной машины (реферат, курсовая, диплом, контрольная)
Ранее было проведено исследование статической устойчивости и установлены условия ее обеспечения. Однако при резком изменении нагрузки возможно выпадение машины из синхронизма даже тогда, когда утл нагрузки лежит в требуемых пределах. Для качественного анализа таких явлений рассмотрим последовательность событий, происходящих в подобных ситуациях.
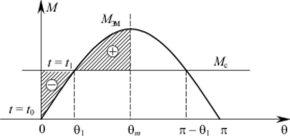
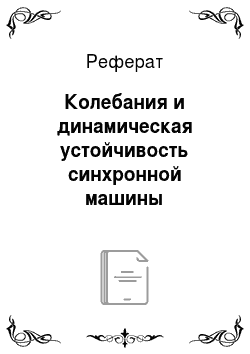
Рис. 5.20. К анализу динамических свойств синхронной машины.
Пусть синхронный двигатель работает в режиме холостого хода, при этом, следовательно, угол нагрузки 0 равен нулю. В момент времени / = /о на вату машины резко возрастает механическая нагрузка, вследствие чего скорость двигателя начинает уменьшаться, т. е. оказывается меньше синхронной скорости (со < coi). Угол нагрузки начнет возрастать, а развиваемый машиной момент — увеличиваться (рис. 5.20). Через некоторый промежуток времени при t = t электромагнитный момент станет равным моменту нагрузки. Эта точка соответствует условию статического равновесия, однако к этому времени скорость двигателя еще меньше синхронной — до сих пор она уменьшалась, так как движение происходило под действием отрицательного момента (Мт < Мс). Ввиду этого угол рассогласования продолжает возрастать, а скорость уменьшаться. Если при этом окажется, что она достигла синхронной скорости при угле, меньшем я — 0(), то скорость станет увеличиваться, а угол рассогласования уменьшаться и после некоторых колебаний достигнет точки угла нагрузки, равного 0оНапротив, сели синхронная скорость окажется равной синхронной при угле нагрузки, большем чем (я — 0О), то в дальнейшем она будет продолжать падать, так как ускоряющий момент станет отрицательным и машина в конце концов остановится. Аналогичная картина будет наблюдаться и для случая генераторного режима с той лишь разницей, что в результате выпадения из синхронизма машина пойдет вразнос, так как вся подводимая механическая мощность будет расходоваться на увеличение кинетической энергии.
Для анализа поведения машины в рассматриваемых условиях составим уравнения движения для двигательного режима. На первом этапе будем считать, что электромагнитные процессы затухают намного быстрее механических, т. е. проведем анализ при тех же допущениях, что и при статической устойчивости.
Рис. 5.21. К определению угла нагрузки 0.
Электромагнитный момент в синхронной машине пропорционален синусу угла между результирующим вектором напряжения сети U.s и поперечной осью ротора q. Скорость первого определяется частотой сети и равна со, = 2я/|, она считается постоянной, в то время как скорость ротора в общем случае является переменной величиной, колеблющейся относительно синхронной. Поэтому се удобно представить в виде суммы скоростей.

где со — скорость колебаний ротора относительно синхронной скорости Ю|. (При анализе статической устойчивости она обозначалась Асо] для малых изменений скорости). Тогда угол нагрузки 0 можно представить в следующем виде (рис. 5.21): 
откуда найдем.
С учетом последних выражений уравнение движения ротора во вращающейся координатной системе можно подучить, пренебрегая явнополюсностью машины:

где Мс — момент сопротивления механизма.
Последняя форма уравнения встречалась выше, при анализе статической устойчивости, и приводимое решение было связано с изучением характера малых колебаний вблизи точки равновесия а. Теперь на основе этого уравнения рассмотрим динамическую устойчивость (устойчивость в «большом»).
Дтя поиска решения преобразуем уравнение (5.46), выразив независимую переменную следующим образом:
и в результате получим уравнение движения 
интегрируя которое, получим.

где 0О — начальное значение угла нагрузки — исходной точки равновесия, в которой находилась система до возмущения. При этом скорость ротора была равна синхронной (со (г) = 0).
Уравнение (5.46) показывает, что суммарная работа механических сил равна изменению кинетической энергии, что позволяет найти закон изменения скорости со =/0). Однако для оценки динамической устойчивости нет необходимости искать траекторию движения. Для этого достаточно установить, достигнет ли ротор синхронной скорости в области ускоряющих моментов (на рис. 5.22 она соответствует области 0] <0<(я-0|) для двигательного ре;
тьма). В этом случае скорость машины начнет возрастать и сохранится возможность достичь нового положения равновесия, соответствующего углу 9 = 0]. Следовательно, критерий динамической устойчивости запишется как 
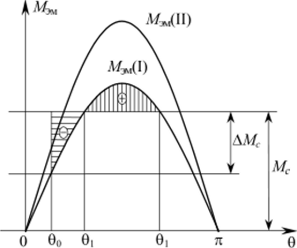
Рис. 5.22. К пояснению метода равновеликих площадей.
Он известен как правило площадей и показывает, что когда работа сил торможения нс превосходит работу сил ускорения, обеспечивается возможность работы в новой точке равновесия 01 (заштрихованные площади на рис. 5.22). На рисунке предстаален случай, когда при работе двигателя в точке 0о значение допус;
тимого наброса нагрузки ДА/С найдено как предельно допустимое.
Угол нагрузки 0″" соответствующий синхронной скорости, удобнее всего находить путем графического решения уравнения (5.49). Для этого приведем его к виду.

где т = Мюм/Мпах — момент сопротивления в долях от максимального.
На рис. 5.23 представлено графическое решение приведенного уравнения (5.36) для случая, когда в режиме холостого хода происходит наброс нагрузки, равный т = 0,5. Решение уравнения найдем, построив графики левой и правой его частей:
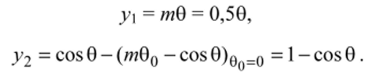
= 1,099 рад.
Точка пересечения указанных зависимостей (точка А) дает искомое решение 0() = 63°.
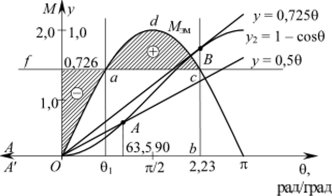
Рис. 5.23. К анализ) динамической устойчивости для случая 0о = О.
Приведенное графическое решение позволяет найти критическое значение момента нагрузки, при котором машина сохраняет возможность работы в синхронном режиме. Его определяет прямая ОВ> касательная к кривой, выражающая зависимость у2. Для этого случая угол максимального отклонения равен 0тах = 133,5°(2,23 рад), а момент нагрузки т = 0,725. Как видно из рис. 5.24, на границе устойчивости работы сил ускорения и сил торможения (заштрихованные области) ровны. При т > 0,725 это условие будет нарушено в пользу последнего, следовательно, скорость продолжит уменьшаться и двигатель в конце концов остановится.
При т = 0,5 отклонение равно 0тах = 63°, что существенно меньше значения |0| < |л — 0тах|, за которым на ротор будет действовать тормозящий момент.
Рассмотренный метод исследования динамической устойчивости при резких нарушениях равновесия (правило площадей) справедлив при любом характере изменения электромагнитного момента и момента сопротивления от угла нагрузки 0 и может быть записан (см. рис. 5.22) в самом общем вале.
Полезно обратить внимание на то, что амплитуда колебаний нс зависит от момента инерции, по аналогии с маятником она определяется только начальным отклонением от точки равновесия. Момент инерции характеризует период колебаний. В крупных синхронных машинах его значение достигает нескольких секунд.
В синхронных генераторах изменение нагрузки связано с подключением (отключением) потребителей электрической энергии, аварийными режимами. Методы исследования и критерий динамической устойчивости остаются теми же.
Как видно из проведенного анализа, существенного повышения динамической устойчивости можно достичь включением в цепь возбуждения регуляторов, позволяющих добиться быстрого увеличения тока возбуждения, а вместе с ним напряжения ?} и, следовательно, электромагнитного момента, определяемого уравнением.
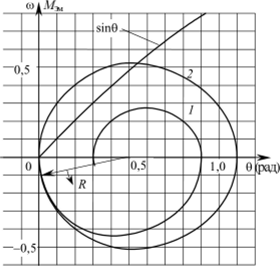
Рис. 5.24. Построение фазовой траектории для уравнения (5.52) 5-методом:
Увеличивая момент, можно снизить наибольшее отклонение от положения равновесия и таким образом удержать машину в синхронном режиме. Такими регуляторами снабжены все крупные синхронные генераторы.
Другим фактором, повышающим динамическую устойчивость, является применение демпферной обмотки.
1 — тс = 0,5, 6(0) = 0, р = 0,2; 2-тс= 0,5, 0(0) = 0, р = 0.
Возникающий при этом асинхронный момент при любом изменении скорости будет стремиться вернуть машину к синхронной скорости, что будет способствовать уменьшению колебаний.
Уравнение движения для рассматриваемого случая получим, добавляя в уравнение (5.46) момент, созданный демпферной обмоткой:

где М"i (0) и MM(s) — синхронный и асинхронный моменты.
Зависимость момента, созданного демпферной обмоткой, от скольжения приведена ранее на рис. 5.19.
Поскольку при колебаниях ротора его скорость незначительно отличается от синхронной, нс будет большой ошибкой представить момент в виде линейной зависимости от скольжения.
Так как 
то, переходя к углу 0, получим.
а зависимость асинхронного (демпферного) момента можно представить как.

В результате уравнение движения (5.50) преобразуется к виду.

Другая — безразмерная — форма уравнения, более удобная для численных расчетов, получится, если ввести новую независимую переменную 
тогда получим  где
где 
Правильность знаков при электромагнитных моментах легко установить по характеру изменения скорости. Например, для двигательного режима, область рабочих углов которого п > 0 > 0, при набросе нагрузки скорость ротора падает, т. е. dQ/dt < 0. Как видно из уравнения (5.52), демпферный момент, как и синхронный, препятствует увеличению угла рассогласования, что отвечает' физической картине происходящих явлений, следовательно, знаки в уравнении указаны верно.
На рис. 5.24 приведена фазовая траектория движения ротора, начальные точки которой 0(0) = 0 и со (0) = 0 лежат в начале координат. Они построены как результат решения нелинейного уравнения (5.52) для двух случаев, которые показывают, какую положительную роль играет демпферная обмотка в уменьшении амплитуды колебаний. В результате достигается и большая динамическая устойчивость.
В заключение представим еще одну форму уравнения.движения. Поскольку демпферный момент в явном виде зависит от скольжения, поэтому в ряде случаев удобней оперировать не со скоростью колебаний относительно синхронной скорости со, а со скольжением л Дтя этого воспользуемся уравнением (5.51). Вводя относительное время т = со0>, получим уравнение 
подставив которое в уравнение (5.52), найдем.

— г J «о Так как а т =——, то последнее уравнение преооразуется к виду со, s

где.
В качестве 8-функции здесь удобно принять.

Преимуществом последней формы уравнения движения является наглядная связь между синхронным и асинхронньтм моментами. Однако и в том и в другом случае для построения фазовой траектории оэ (0) необходимо знать собственную частоту колебаний для рассматриваемой машины о)0.
Отметим, что с помощью уравнений (5.52) и (5.54) можно также анализировать процесс вхождения в синхронизм, например, когда синхронный. двигатель запускается как асинхронный и при достижении подсинхронной скорости подается питание в обмотку возбуждения. При определенных условиях под действием синхронного момента машина втягивается в синхронный режим. В рассматриваемом случае решение задачи должно проводиться с учетом начальной скорости ротора, и это единственное ее отличие от задач, связанных с набросом нагрузки. Здесь удобнее воспользоваться уравнением (5.54).