Регулирование скорости ротора синхронного двигателя
Активный ток двигателя /а = / • cos (p при постоянном напряжении сети пропорционален моменту, приложенному к валу машины (тормозящему в случае двигателя, вращающему — в случае генератора). Пока этот момент постоянный, активный ток не изменяется. При выборе двигателя для рабочей машины величина совф является экономическим показателем, влияющим на себестоимость продукции. Поэтому при выборе… Читать ещё >
Регулирование скорости ротора синхронного двигателя (реферат, курсовая, диплом, контрольная)
Практически скорость СД не регулируется.
Теоретически скорость ротора меняется изменением частоты тока:

причем /, должна изменяться плавно. Изменять скорость скачкообразно, т. е. числом пар полюсов (р), нельзя, так как резко возрастет ток ротора и он перегреется.
Способность синхронного двигателя изменять сдвиг фаз между током и напряжением
Способность синхронного двигателя влиять на сдвиг фаз между током и напряжением может быть использована для повышения coscp электроустановок.
Снижение cos ф имеет ряд негативных последствий:
- 1) электродвигатели, работающие с низким созф, непроизводительно загружают генераторы, трансформаторы подстанций и электрические сети реактивным током;
- 2) низкий совф свидетельствует о недоиспользовании двигателя по мощности и снижении его КПД;
- 3) увеличиваются потери энергии в проводах или необходимо увеличивать сечение проводов, так как потери определяются

Факторы, понижающие cos ф асинхронных двигателей:
- 1) недогрузка двигателя резко снижает cosф. Оптимальное значение cos ф имеет при номинальной нагрузке (табл. 5.1);
- 2) износ подшипников увеличивает зазор между ротором и статором, следовательно, снижается ««ф.
При выборе двигателя для рабочей машины величина совф является экономическим показателем, влияющим на себестоимость продукции. Поэтому при выборе двигателя желательно выбирать более скоростной двигатель, учитывая кинематику привода.
Таблица 5.1
Зависимость cos ф от нагрузки для двигателя 4A90L2Y.
Загрузка, % от номинальной мощности Р" | С08ф. |
0,51. | |
0,73. | |
0,83. | |
0,87. | |
0,89. |
Для маломощных асинхронных двигателей, наиболее распространенных в сельском хозяйстве, номинальный cos (p находится в пределах 0,75—0,90. Поэтому для повышения его прибегают к искусственным способам, которые сводятся к компенсации реактивной мощности.
Такими способами могут быть:
- а) статический компенсатор — конденсаторная батарея. Способ рассмотрен в учебнике [13];
- б) динамический компенсатор — синхронный двигатель, работающий на холостом ходу (без нагрузки) в перевозбужденном состоянии.
Во втором способе используется ценное свойство синхронного двигателя — возможность регулирования его реактивного тока, а следовательно, изменения cos (p посредством изменения тока возбуждения.
Рассмотрим влияние изменения тока возбуждения на реактивный ток синхронного двигателя.
Активный ток двигателя /а = / • cos (p при постоянном напряжении сети пропорционален моменту, приложенному к валу машины (тормозящему в случае двигателя, вращающему — в случае генератора). Пока этот момент постоянный, активный ток не изменяется.

Путем изменения постоянного тока возбуждения ротора можно изменять ЭДС, индуктируемую в обмотке переменного тока статора. Напряжение сети поддерживается постоянным, поэтому изменение ЭДС (Е) должно вызывать изменения тока в статоре (Г) (рис. 5.5), согласно выражению где j — вектор (-1); / — вектор тока статора; х — индуктивное сопротивление; Е — вектор ЭДС, индуктируемой магнитным потоком ротора; U' - вектор напряжения сети; AU' — вектор падения напряжения в статоре.
При постоянной нагрузке активная составляющая тока (/а) постоянна. Поэтому изменяться может лишь его реактивная составляющая — реактивный ток. Следовательно, на векторной диаграмме синхронного двигателя геометрическим местом конца вектора полного тока / должна служить прямая, проведенная перпендикулярно вектору напряжения (U) на расстоянии от начала координат, равном /а (рис. 5.6).

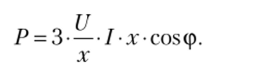
Чтобы уточнить положение конца вектора полного тока / относительно вектора ЭДС Е, обратимся к уравнению мощности, потребляемой двигателем:
Постоянству момента М соответствует постоянство мощности Р. Поэтому, умножив и разделив выражение мощности (5.4) на х (индуктивное сопротивление двигателя), определим, что величина I х — cos (p = const. Так как Р = const и U/x = const, то.
При изменении тока возбуждения 1В изменяется угол ф.
При х = const и изменении полного тока будет изменяться cos ф.
Поэтому при всех изменениях ЭДС (?), вызываемых изменением тока возбуждения (при регулировании), конец вектора Ё должен перемещаться по прямой, проведенной параллельно вектору U' на расстоянии 1Х • cos (p (рис. 5.6).
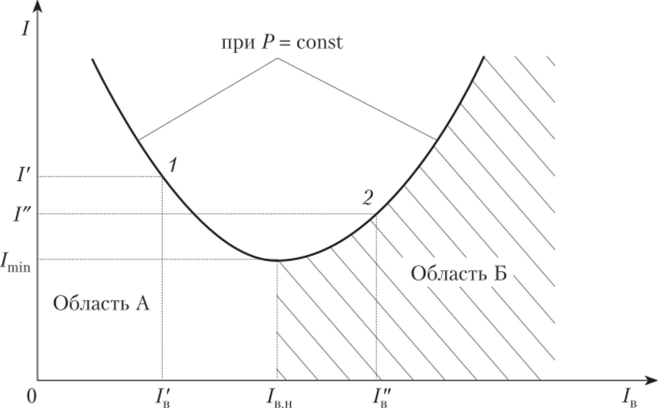
Рис. 5.5. График зависимости полного тока двигателя от тока возбуждения обмотки ротора:
область, А — недовозбуждения; область Б — перевозбуждения;
/вн — номинальный ток возбуждения, при котором ф = 0, соБф = 1; при Im jn I — /а, /р— О Теперь, чтобы найти положение вектора тока /, нужно сначала построить прямые, определяющие геометрические места векторов I и Е. Затем на основании заданного значения Е следует отложить этот вектор так, чтобы его конец лежал на прямой, определяющей его геометрическое место.
Вектор jlx должен на диаграмме соединять концы векторов Е и U'. Он опережает вектор I на 9(Г Поэтому строим вектор I из начала координат под углом 90° к вектору /7.г.
Из графика (см. рис. 5.6) видно, что ток двигателя опережает по фазе напряжение сети, когда Е • cos0 > U (двигатель перевозбужден), и отстает от напряжения, когда Е • cos в < U (двигатель недовозбужден).
Если двигатель недовозбужден, он потребляет реактивный намагничивающий ток, необходимый для усиления его магнитного поля до величины, соответствующей равновесию Е = U + jlx.
Если двигатель перевозбужден, мгновенные значения его ЭДС (е) больше мгновенных значений напряжения сети (и) и избыток ЭДС создает реактивный ток, опережающий по фазе напряжение сети. При этом соответствующая мгновенная мощность будет увеличиваться, пока ЭДС возрастает (по модулю), и уменьшаться, когда она убывает.
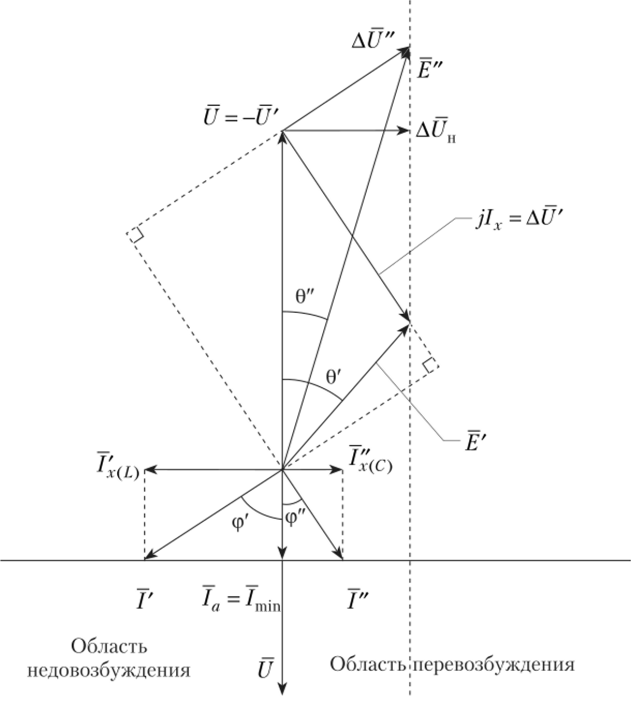
Рис. 5.6. Векторная диаграмма синхронного двигателя
Таким образом, перевозбужденный синхронный двигатель может, подобно емкости, улучшать coscp сети предприятия, снижаемый индуктивными токами асинхронных двигателей.
Для этого двигатель включается в сеть параллельно с асинхронными двигателями, имеющими (особенно маломощные) низкий coscp (рис. 5.7). При этом coscp сети повышается, что видно по векторной диаграмме токов (рис. 5.8).
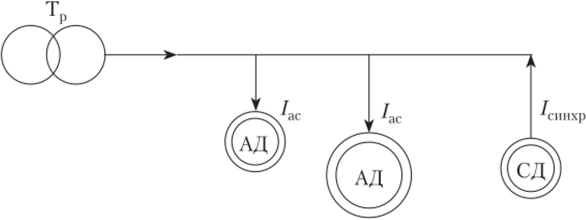
Рис. 5.7. Схема включения синхронного двигателя в сеть с асинхронными
для повышения coscp
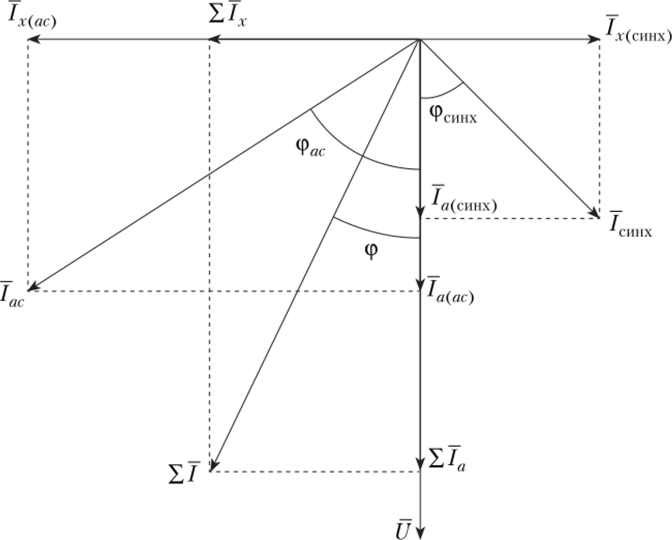
Рис. 5.8. Векторная диаграмма компенсации реактивного тока в сети синхронным перевозбужденным двигателем.
Для сельского хозяйства синхронные двигатели мощностью 10—30 кВт весьма перспективны.